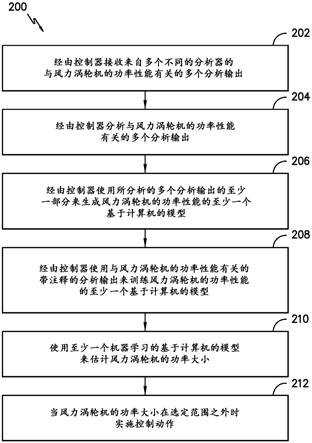
1.各种示例实施例涉及用户设备的定位。
背景技术:
2.通信系统可以被视为一种通过在通信路径中涉及的各种实体之间提供载波来实现两个或更多实体(诸如通信设备、基站/接入点和/或其他节点)之间的通信会话的设施。例如,通信系统可以通过通信网络和一个或多个兼容的通信设备来提供。
3.对通信系统的接入可以经由适当的通信设备或终端来进行。通信设备被提供有适当的信号接收和传输装置以用于启用通信,例如启用对通信网络的接入或直接与其他通信设备的通信。通信设备可以接入由站或接入点提供的载波,并且在该载波上传输和/或接收通信。
4.通信系统和相关设备通常根据给定标准或规范操作,该标准或规范规定了与系统相关联的各种实体被允许做什么以及应当如何实现。
技术实现要素:
5.根据一个方面,提供了一种方法,该方法包括:在第一阶段确定通信设备的第一位置;从第一阶段将第一位置输入到第二阶段的机器学习模型;以及在第二阶段至少基于来自第一阶段的第一位置通过使用机器学习模型来确定通信设备的第二位置。
6.第一位置可以在第一阶段通过使用至少非机器学习模型和机器学习模型中的一者而被确定。
7.在确定第一位置之后,来自第一阶段的第一位置可以直接被输入到第二阶段的机器学习模型。
8.该方法还可以包括:在第一阶段确定第一位置的第一定位准确度;以及比较第一定位准确度和定位服务质量的第二定位准确度,其中如果比较第一定位准确度和第二定位准确度的结果是第一定位准确度低于第二定位准确度,则来自第一阶段的第一位置可以被输入到第二阶段的机器学习模型,并且其中该方法还可以包括:如果比较第一定位准确度和第二定位准确度的结果是第一定位准确度低于第二定位准确度,则将来自第一阶段的第一定位准确度输入到第二阶段的机器学习模型,第二位置在第二阶段进一步基于所输入的第一定位准确度而被确定。
9.确定第一位置准确度可以包括使用查找表。
10.第二阶段的机器学习模型可以包括自动编码器,并且来自第一阶段的第一位置可以被输入到自动编码器的潜在层。
11.来自第一阶段的第一定位准确度可以被输入到自动编码器的潜在层。
12.自动编码器可以通过以下方式被离线训练:计算自动编码器的输出处的第一损失;通过至少使用通信设备的第一位置和通信设备的第二位置来计算在自动编码器的潜在层的第二损失;以及使用第一损失和第二损失来训练自动编码器。
13.第二损失可以包括第一项和第二项之和,第二项使得第二位置处于第一位置周围的空间内。
14.第二项可以基于第一位置与第二位置之间的最大绝对距离。
15.根据一个方面,提供了一种方法,该方法包括:在第二阶段的机器学习模型处接收通信设备的第一位置,第一位置是在第一阶段被确定的;以及在第二阶段至少基于来自第一阶段的第一位置通过使用机器学习模型来确定通信设备的第二位置。
16.在确定第一位置之后,来自第一阶段的第一位置可以在第二阶段的机器学习模型处直接被接收。
17.如果来自第一阶段的第一位置的第一定位准确度低于定位服务质量的第二定位准确度,则来自第一阶段的第一位置可以在第二阶段的机器学习模型处被接收,并且该方法还可以包括:如果第一定位准确度低于第二定位准确度,则在第二阶段从第一阶段接收第一定位准确度,第二位置在第二阶段进一步基于所接收的第一定位准确度而被确定。
18.第二阶段的机器学习模型可以包括自动编码器,并且来自第一阶段的第一位置可以在自动编码器的潜在层被接收。
19.来自第一阶段的第一定位准确度可以在自动编码器的潜在层被接收。
20.该方法还可以包括通过以下方式离线训练自动编码器:计算自动编码器的输出处的第一损失;通过至少使用通信设备的第一位置和通信设备的第二位置来计算在自动编码器的潜在层的第二损失;以及使用第一损失和第二损失来训练自动编码器。
21.第二损失可以包括第一项和第二项之和,第二项使得第二位置处于第一位置周围的空间内。
22.第二项可以基于第一位置与第二位置之间的最大绝对距离。
23.根据一个方面,提供了一种装置,该装置包括:至少一个处理器;以及包括计算机程序代码的至少一个存储器,其中至少一个存储器和计算机程序代码被配置为与至少一个处理器一起使该装置至少:在第一阶段确定通信设备的第一位置;从第一阶段将第一位置输入到第二阶段的机器学习模型;以及在第二阶段至少基于来自第一阶段的第一位置通过使用机器学习模型来确定通信设备的第二位置。
24.第一位置可以在第一阶段通过使用至少非机器学习模型和机器学习模型中的一者而被确定。
25.在确定第一位置之后,来自第一阶段的第一位置可以直接被输入到第二阶段的机器学习模型。
26.至少一个存储器和计算机程序代码还可以被配置为与至少一个处理器一起使该装置至少:在第一阶段确定第一位置的第一定位准确度;以及比较第一定位准确度和定位服务质量的第二定位准确度,其中如果第一定位准确度与第二定位准确度之间的比较的结果是第一定位准确度低于第二定位准确度,则来自第一阶段的第一位置可以被输入到第二阶段的机器学习模型,并且其中至少一个存储器和计算机程序代码还可以被配置为与至少一个处理器一起使该装置至少:如果第一定位准确度与第二定位准确度之间的比较的结果是第一定位准确度低于第二定位准确度,则将来自第一阶段的第一定位准确度输入到第二阶段的机器学习模型,第二位置在第二阶段进一步基于所输入的第一定位准确度而被确定。
27.第一定位准确度可以通过使该装置至少使用查找表而被确定。
28.第二阶段的机器学习模型可以包括自动编码器,并且来自第一阶段的第一位置可以被输入到自动编码器的潜在层。
29.第一定位准确度可以被输入到自动编码器的潜在层。
30.至少一个存储器和计算机程序代码还可以被配置为与至少一个处理器一起使该装置至少通过以下方式离线训练自动编码器:计算自动编码器的输出处的第一损失;通过至少使用通信设备的第一位置和通信设备的第二位置来计算在自动编码器的潜在层的第二损失;以及使用第一损失和第二损失来训练自动编码器。
31.第二损失可以包括第一项和第二项之和,第二项使得第二位置处于第一位置周围的空间内。
32.第二项可以基于第一位置与第二位置之间的最大绝对距离。
33.根据一个方面,提供了一种装置,该装置包括:至少一个处理器;以及包括计算机程序代码的至少一个存储器,其中至少一个存储器和计算机程序代码被配置为与至少一个处理器一起使该装置至少:在第二阶段的机器学习模型处接收通信设备的第一位置,第一位置是在第一阶段被确定的;以及在第二阶段至少基于来自第一阶段的第一位置通过使用机器学习模型来确定通信设备的第二位置。
34.在确定第一位置之后,来自第一阶段的第一位置可以在第二阶段的机器学习模型处直接被接收。
35.如果来自第一阶段的第一位置的第一定位准确度低于定位服务质量的第二定位准确度,则来自第一阶段的第一位置可以在第二阶段的机器学习模型处被接收,并且至少一个存储器和计算机程序代码还可以被配置为与至少一个处理器一起使该装置至少:如果第一定位准确度低于第二定位准确度,则在第二阶段从第一阶段接收第一定位准确度,第二位置在第二阶段进一步基于所接收的第一定位准确度而被确定。
36.第二阶段的机器学习模型可以包括自动编码器,并且来自第一阶段的第一位置可以在自动编码器的潜在层被接收。
37.来自第一阶段的第一定位准确度可以在自动编码器的潜在层被接收。
38.至少一个存储器和计算机程序代码还可以被配置为与至少一个处理器一起使该装置至少通过以下方式离线训练自动编码器:计算自动编码器的输出处的第一损失;通过至少使用通信设备的第一位置和通信设备的第二位置来计算在自动编码器的潜在层的第二损失;以及使用第一损失和第二损失来训练自动编码器。
39.第二损失可以包括第一项和第二项之和,第二项使得第二位置处于第一位置周围的空间内。
40.第二项可以基于第一位置与第二位置之间的最大绝对距离。
41.根据一个方面,提供了一种装置,该装置包括用于以下操作的部件:在第一阶段确定通信设备的第一位置;从第一阶段将第一位置输入到第二阶段的机器学习模型;以及在第二阶段至少基于来自第一阶段的第一位置通过使用机器学习模型来确定通信设备的第二位置。
42.第一位置可以在第一阶段通过使用至少非机器学习模型和机器学习模型中的一者而被确定。
43.在确定第一位置之后,来自第一阶段的第一位置可以直接被输入到第二阶段的机器学习模型。
44.该装置还可以包括用于以下操作的部件:在第一阶段确定第一位置的第一定位准确度;以及比较第一定位准确度和定位服务质量的第二定位准确度,其中如果比较第一定位准确度和第二定位准确度的结果是第一定位准确度低于第二定位准确度,则来自第一阶段的第一位置可以被输入到第二阶段的机器学习模型,并且其中该装置还包括用于以下操作的部件:如果比较第一定位准确度和第二定位准确度的结果是第一定位准确度低于第二定位准确度,则将来自第一阶段的第一定位准确度输入到第二阶段的机器学习模型,第二位置在第二阶段进一步基于所输入的第一定位准确度而被确定。
45.确定第一位置准确度可以包括使用查找表。
46.第二阶段的机器学习模型可以包括自动编码器,并且来自第一阶段的第一位置可以被输入到自动编码器的潜在层。
47.来自第一阶段的第一定位准确度可以被输入到自动编码器的潜在层。
48.该装置还可以包括用于通过以下方式离线训练自动编码器的部件:计算自动编码器的输出处的第一损失;通过至少使用通信设备的第一位置和通信设备的第二位置来计算在自动编码器的潜在层的第二损失;以及使用第一损失和第二损失来训练自动编码器。
49.第二损失可以包括第一项和第二项之和,第二项使得第二位置处于第一位置周围的空间内。
50.第二项可以基于第一位置与第二位置之间的最大绝对距离。
51.根据一个方面,提供了一种装置,该装置包括用于以下操作的部件:在第二阶段的机器学习模型处接收通信设备的第一位置,第一位置是在第一阶段被确定的;以及在第二阶段至少基于来自第一阶段的第一位置通过使用机器学习模型来确定通信设备的第二位置。
52.在确定第一位置之后,来自第一阶段的第一位置可以在第二阶段的机器学习模型处直接被接收。
53.如果来自第一阶段的第一位置的第一定位准确度低于定位服务质量的第二定位准确度,则来自第一阶段的第一位置可以在第二阶段的机器学习模型处接收;以及,并且该装置还可以包括用于以下操作的部件:如果第一定位准确度低于第二定位准确度,则在第二阶段从第一阶段接收第一定位准确度,第二位置在第二阶段进一步基于所接收的第一定位准确度而被确定。
54.第二阶段的机器学习模型可以包括自动编码器,并且来自第一阶段的第一位置可以在自动编码器的潜在层被接收。
55.来自第一阶段的第一定位准确度可以在自动编码器的潜在层被接收。
56.该装置还可以包括用于通过以下方式离线训练自动编码器的部件:计算自动编码器的输出处的第一损失;通过至少使用通信设备的第一位置和通信设备的第二位置来计算在自动编码器的潜在层的第二损失;以及使用第一损失和第二损失来训练自动编码器。
57.第二损失可以包括第一项和第二项之和,第二项使得第二位置处于第一位置周围的空间内。
58.第二项可以基于第一位置与第二位置之间的最大绝对距离。
59.根据一个方面,提供了一种包括计算机可执行代码的计算机程序,该计算机可执行代码当在至少一个处理器上运行时可以被配置为使装置至少:在第一阶段确定通信设备的第一位置;从第一阶段将第一位置输入到第二阶段的机器学习模型;以及在第二阶段至少基于来自第一阶段的第一位置通过使用机器学习模型来确定通信设备的第二位置。
60.根据一个方面,提供了一种包括计算机可执行代码的计算机程序,该计算机可执行代码当在至少一个处理器上运行时可以被配置为使装置至少:在第二阶段的机器学习模型处接收第一通信设备的位置,第一位置是在第一阶段被确定的;以及在第二阶段至少基于来自第一阶段的第一位置通过使用机器学习模型来确定通信设备的第二位置。
61.根据一个方面,提供了一种包括计算机可执行代码的计算机程序,该计算机可执行代码当在至少一个处理器上运行时可以被配置为使装置执行上述方法中的任何方法。
62.根据一个方面,提供了一种包括存储在其上的程序指令的计算机可读介质,该程序指令用于:在第一阶段确定通信设备的第一位置;从第一阶段将第一位置输入到第二阶段的机器学习模型;以及在第二阶段至少基于来自第一阶段的第一位置通过使用机器学习模型来确定通信设备的第二位置。
63.根据一个方面,提供了一种包括存储在其上的程序指令的计算机可读介质,该程序指令用于:在第二阶段的机器学习模型处接收第一通信设备的位置,第一位置是在第一阶段被确定的;以及在第二阶段至少基于来自第一阶段的第一位置通过使用机器学习模型来确定通信设备的第二位置。
64.根据一个方面,提供了一种包括存储在其上的程序指令的计算机可读介质,该程序指令用于执行上述方法中的任何方法。
65.根据一个方面,提供了一种包括存储在其上的程序指令的非瞬态计算机可读介质,该程序指令用于:在第一阶段确定通信设备的第一位置;从第一阶段将第一位置输入到第二阶段的机器学习模型;以及在第二阶段至少基于来自第一阶段的第一位置通过使用机器学习模型来确定通信设备的第二位置。
66.根据一个方面,提供了一种包括存储在其上的程序指令的非瞬态计算机可读介质,该程序指令用于:在第二阶段的机器学习模型处接收第一通信设备的位置,第一位置是在第一阶段被确定的;以及在第二阶段至少基于来自第一阶段的第一位置通过使用机器学习模型来确定通信设备的第二位置。
67.根据一个方面,提供了一种包括存储在其上的程序指令的非瞬态计算机可读介质,该程序指令用于执行上述方法中的任何方法。
68.根据一个方面,提供了一种包括存储在其上的程序指令的非易失性有形存储介质,该程序指令用于:在第一阶段确定通信设备的第一位置;从第一阶段将第一位置输入到第二阶段的机器学习模型;以及在第二阶段至少基于来自第一阶段的第一位置通过使用机器学习模型来确定通信设备的第二位置。
69.根据一个方面,提供了一种包括存储在其上的程序指令的非易失性有形存储介质,该程序指令用于:在第二阶段的机器学习模型处接收第一通信设备的位置,第一位置是在第一阶段被确定的;以及在第二阶段至少基于来自第一阶段的第一位置通过使用机器学习模型来确定通信设备的第二位置。
70.根据一个方面,提供了一种包括存储在其上的程序指令的非易失性有形存储介
质,该程序指令用于执行上述方法中的任何方法。
71.根据一个方面,提供了一种装置,该装置包括被配置为进行以下操作的电路系统:在第一阶段确定通信设备的第一位置;从第一阶段将第一位置输入到第二阶段的机器学习模型;以及在第二阶段至少基于来自第一阶段的第一位置通过使用机器学习模型来确定通信设备的第二位置。
72.根据一个方面,提供了一种装置,该装置包括被配置为进行以下操作的电路系统:在第二阶段的机器学习模型处接收第一通信设备的位置,第一位置是在第一阶段被确定的;以及在第二阶段至少基于来自第一阶段的第一位置通过使用机器学习模型来确定通信设备的第二位置。
73.根据一个方面,提供了一种装置,该装置包括被配置为执行上述方法中的任何方法的电路系统。
74.在上文中,已经描述了很多不同的方面。应当理解,其他的方面可以通过上述方面中的任何两个或更多方面的组合来提供。
75.在以下详细描述和所附权利要求中还描述了各种其他方面。
附图说明
76.现在将参考以下附图描述一些示例实施例:
77.图1示出了无线通信系统的示例实施例;
78.图2示出了通信设备的示例实施例;
79.图3示出了非瞬态计算机可读介质的示例实施例;
80.图4示出了装置的示例实施例;
81.图5示出了非漫游架构的示例实施例;
82.图6示出了不同定位方法在不同场景下的预期水平定位准确度的示例图;
83.图7示意性地示出了定位过程的示例实施例;
84.图8示意性地示出了由定位过程的不同定位方法提供的定位准确度的比较水平的示例实施例;
85.图9示出了在ue跟随轨迹的情况下时间尺度表示的示例实施例;
86.图10示出了定位过程的示例实现;
87.图11示出了自动编码器的示例实施例;
88.图12示出了描述定位过程的示例实施例的示例流程图;
89.图13示出了描述由基于ml的定位方法的ml模型执行的定位过程的示例实施例的示例流程图;
90.图14示出了具有ue位置的环境的示例实施例;以及
91.图15示出了三种定位方法的估计误差的累积密度函数近似的示例实施例。
具体实施方式
92.如本文中使用的,应当注意,除非另有说明,否则术语“定位”、“位置”和“地点)”及其派生词或变体将以相似的含义使用。
93.众所周知,无线系统可以划分为小区,并且因此通常被称为蜂窝系统。通常,诸如
基站等接入点提供至少一个小区。蜂窝系统可以支持用户设备(ue)设备之间的通信。本技术涉及蜂窝无线电实现,包括2g、3g、4g和5g无线电接入网(ran);蜂窝物联网(iot)ran;以及蜂窝无线电硬件。
94.在下文中,参考能够经由无线蜂窝系统进行通信的通信设备和服务于这样的通信设备的通信系统来解释某些实施例。在详细解释示例实施例之前,参考图1至图4简要解释无线通信系统、其接入系统和通信设备的某些一般原理,以帮助理解作为所描述的示例的基础的技术。
95.无线通信系统的一个示例是由第三代合作伙伴项目(3gpp)标准化的架构。最新的基于3gpp的开发通常被称为5g或新无线电(nr)。无线电接入系统的其他示例包括由基于诸如无线局域网(wlan)和/或全球微波接入互操作性(wimax)等技术的系统的基站提供的无线电接入系统。应当理解,尽管一些实施例是在5g系统的上下文中描述的,但其他实施例可以在任何其他合适的系统中提供,包括但不限于后续系统或在3gpp论坛之外定义的类似协议。
96.图1示出了无线通信系统100的示例实施例。如在其中可以看出,通信设备102由第一小区104服务,该第一小区104由第一基站108a提供。
97.在该示例实施例中,通信设备102可以由第二小区106服务,该第二小区106由第二基站108b提供。取决于系统100,基站108a、108b可以是任何合适的传输接收点(trp)。例如,trp(有时称为trxp)可以是gnb或ng-enb(术语“ng”表示“下一代”)。
98.在下文中,通信设备将被称为ue。然而,应当理解,该设备可以是任何合适的通信设备,并且术语ue可以旨在涵盖任何这样的设备。下面讨论通信设备的一些示例,并且如在本文档中使用的,术语ue旨在涵盖这些设备中的任何一个或多个和/或任何其他合适的设备。通信设备具有到基站的无线连接。
99.图2示出了诸如图1的通信设备102等通信设备200的示例实施例。
100.通信设备200可以由能够发送和接收无线电信号的任何设备提供。非限制性示例包括移动台(ms)或移动设备(诸如移动电话或所谓的“智能电话”)、具有无线接口卡或其他无线接口设施(例如,usb加密狗)的计算机,具有无线通信能力的个人数据助理(pda)或平板电脑、机器类型通信(mtc)设备、iot类型通信设备、或其任何组合等。
101.可以看出,通信设备200可以包括收发器装置210,该收发器装置210被配置为通过空中或无线电接口212接收信号并且传输信号。例如,收发器装置210可以通过无线电部分和相关联的天线布置来提供。此外,天线布置可以布置在通信设备200内部或外部。
102.通信设备200可以包括至少一个处理器202和至少一个存储器204。至少一个存储器204可以包括至少一个只读存储器(rom)和/或至少一个随机存取存储器(ram)。通信设备200可以包括其他可能的组件206,该组件206用于在通信设备200被设计为执行的任务的软件和硬件辅助执行中使用,包括对接入系统和其他通信设备的接入和通信的控制。至少一个处理器202耦合到至少一个存储器204。至少一个处理器202可以被配置为执行适当的软件代码以实现以下实施例中的一个或多个。软件代码可以存储在至少一个存储器204中,例如,存储在至少一个rom中。
103.处理器202、存储装置和其他相关控制装置可以设置在适当的电路板上和/或在芯片组(由附图标记208表示)中。
104.通信设备200可以可选地具有用户接口,诸如小键盘、触敏屏或键盘、或其任何组合等。
105.可选地,根据通信设备200的类型,可以提供显示器、扬声器和麦克风中的一种或多种。
106.通常还定义了应用于连接的通信协议和/或参数。通信设备200可以基于各种接入技术来接入通信系统100。
107.图3示出了非瞬态计算机可读介质300a(例如,计算机盘(cd)或数字多功能盘(dvd))和300b(例如,通用串行总线(usb)记忆棒)的示例实施例,非瞬态计算机可读介质300a和300b被配置为存储指令和/或参数302,该指令和/或参数302在由处理器执行时允许处理器执行任何实施例的任何方法的一个或多个步骤。
108.图4示出了装置400的示例实施例。
109.装置400可以在任何网络实体中提供。装置400可以包括至少一个处理器410和至少一个存储器420,该至少一个存储器420包括用于一个或多个程序的计算机代码。装置400可以被配置为使一些实施例在例如位置管理功能(lmf)中被执行和提供。
110.以下方面中的一个或多个涉及5g系统(5gs)。作为5gs的一部分而引入的新无线电接口称为新无线电(nr)。然而,应当理解,这些方面中的一些可以与任何其他合适的无线电接入技术系统一起使用,诸如通用移动电信系统(umts)的长期演进(lte)、umts陆地无线电接入网(utran))(3g无线电)和/或任何其他合适的系统。
111.图5在基于服务的接口表示中示出了用于定位服务的非漫游架构500,其中除了通信设备及其与网络的接口,网络还可以提供各种其他功能。
112.这些网络功能中的一些可以由核心网(cn)提供。本技术的示例实施例可以由提供这些功能的这样的网络来提供。同样,虽然本说明书中在这里和其他地方参考ue,但是本领域技术人员应当理解,通信设备可以是与ue不同的另一种类型的通信设备。
113.架构500的lmf 510是5g cn(5gc)中的网络实体,该网络实体负责支持ue 520的位置确定、从ue 520获取下行链路(dl)位置测量或位置估计、从无线电接入网(ng-ran)550获取上行链路(ul)位置测量、以及从ng-ran 550获取非ue相关辅助数据。在一些示例实施例中,lmf 510可以使用基于服务的应用程序编程接口(api)向外部和/或内部客户端公开其服务。
114.架构500的统一数据管理(udm)功能530存储订阅信息并且支持认证凭证储存库和处理功能(arpf)并且存储用于认证的安全凭证。
115.架构500的接入和移动性管理功能(amf)540被配置为执行多个任务,包括:注册管理、连接管理、可达性管理、移动性管理、以及与安全和接入管理和授权相关的各种功能。amf 540为诸如ue 520等设备提供这些服务,ue 520被配置为与cn通信。
116.架构500的ng-ran 550被配置为针对ue 520提供对cn的接入。ng-ran 550包括一个或多个基站和一个或多个相关联的无线电网络控制器(rnc)。
117.架构500的网络数据分析功能(nwdaf)560被配置为根据来自5g网络中的一个或多个网络功能的请求来执行数据分析。在一些示例实施例中,nwdaf 560可以使用api向外部和/或内部客户端公开其服务。
118.架构500的定位服务客户端(lcs)570被配置为作为外部客户端向cn发送和接收通
信。
119.架构500的网关移动定位中心(gmlc)580包含支持基于位置的服务所需要的功能,并且因此与如lcs 570等外部客户端接口。
120.架构500的位置检索功能(lrf)590可以用于检索发起紧急会话的用户的位置信息。
121.ue位置信息可以由网络用于无线电资源管理(rrm)并且还用于提供关键紧急服务。
122.在架构500中,还提供了用于支持定位服务的参考点,诸如:ng-ran 550与amf 540之间的“n2”;以及gmlc 580与lcs客户端570之间和lrf 590与lcs客户端570之间的“le”。
123.在架构500中,还提供了用于支持定位服务的基于服务的接口,例如:由lmf 510示出的“nlmf”;由udm 530示出的“nudm”;由amf 540示出的“namf”;由nwdaf 560示出的“nnwdaf”;以及由gmlc 580示出的“ngmlc”。
124.在这点上,已经提出了若干基于非机器学习(非ml)和机器学习(ml)来执行ue定位的方法。
125.例如,这些基于非ml的定位方法中的一些可以在以下各项中找到:j.a.del peral-rosado等人的“survey of cellular mobile radio localization methods:from 1g to 5g”,ieee通信调查和教程(ieee communications surveys&tutorials),vol.20,no.2,pp.1124-1148,2018年第二季度。其中可以引用有:
126.·
三边测量:ue位置通过计算由终端与参考传输器或接收器之间的距离测量创建的几何形状(例如,圆或双曲线)之间的交点来获取。测量的示例可以是到达时间(toa)、到达时间差(tdoa)或接收信号强度(rss);
127.·
三角测量:利用接收信号的方向或到达角(doa或aoa),利用传入信号的至少两个已知方向的交点来估计位置;
128.·
接近度:将已知传输器位置指定为终端的位置。一个示例可以是基于小区id(cid)的方法,其中所提供的位置是服务基站中的一个;
129.·
场景分析:也称为指纹或模式匹配,该算法基于从指纹数据库中寻找对某个信号测量的最佳匹配,诸如接收信号功率、时间延迟或信道延迟扩展,其中每个指纹与特定位置相关联;以及
130.·
混合:可以实现先前定位算法的组合以提高整体性能或支持由于缺乏信号测量而无法独立计算的算法。
131.ue定位可以被标识为紧急原因的先决条件以及其他目的,诸如网络优化和基于位置的服务(lbs)。到目前为止,基于非ml的定位方法提供了响应于监管机构为紧急目的而设置的要求的ue位置准确度。例如,诸如美国联邦通信委员会(fcc)等监管机构已经定义增强的911(e911)定位要求,该定位要求为67%的911呼叫指定了50米的水平定位准确度和3米的垂直定位准确度。
132.检索自:j.a.del peral-rosado等人的“survey of cellular mobile radio localization methods:from 1g to 5g”,ieee通信调查和教程(ieee communications surveys&tutorials),vol.20,no.2,pp.1124-1148,2018年第二季度,图6示出了蜂窝移动无线电定位方法的预期水平准确度,诸如小区id、射频模式匹配(rfpm)、tdoa、辅助全球导
航卫星系统(a-gnss)和混合,其适用于诸如室内、室外城市和农村等不同场景。可以看出,为2g/3g/4g网络而定义的方法通过wlan/蓝牙测量可以达到最佳的1米准确度。
133.还检索自:j.a.del peral-rosado等人的“survey of cellular mobile radio localization methods:from 1g to 5g”,ieee通信调查和教程(ieee communications surveys&tutorials),vol.20,no.2,pp.1124-1148,second quarter 2018,下表i提供了不同定位方法在水平和垂直计划中可实现的定位准确度的描述,诸如小区id 定时提前(cid ta)、小区id 往返时间(cid rtt)、增强型小区id(e-cid)、rfpm、ul-toa、ul-tdoa(utdoa)、增强型otd(e-otd)、高级前向链路三边测量(aflt)、观察到的tdoa(otdoa)、a-gnss、地面信标系统(tbs)、气压计和混合、以及它们的兼容的无线电接入技术(rat),诸如2g、3g、4g、wlan和蓝牙。
134.表i:蜂窝系统中标准化的定位方法的分类
[0135][0136]
尽管如此,5g网络指定了新用例和场景,与监管机构规定的定位准确度和标准化nr定位方法迄今为止所实现的相比,该新用例和场景需要更高的定位准确度。例如,如3gpp tr 22.862v14.1.0中规定的,高定位准确度包括以下要求:位置信息被获取快速、可靠、并且可用(例如,可以确定位置)。例如,需要“更高准确度定位”的一个典型领域可能是车辆碰撞避免:每个车辆都必须知道自己的位置、附近车辆的位置以及它们的预期路径,以避免碰撞。下一代高准确度定位要求在超过95%的服务区域(包括室内、室外和城市环境)中的准确度低于1米。具体地,三维空间中的基于网络的定位应当在80%的情况下支持10米到《1米
的准确度,并且室内部署的准确度应当优于1米。在交通道路、隧道、地下停车场或室内环境等区域应当支持5g网络中的高准确度定位服务。
[0137]
在这点上,基于ml的定位方法可以与非ml定位方法相比具有更高定位准确度的优势。示例基于ml的定位方法可以基于诸如人工神经网络(ann)等模型,包括例如深度神经网络(dnn)和卷积神经网络(cnn)、决策树、支持向量机(svm)、回归分析、贝叶斯网络和遗传算法(ga)。示例基于ml的定位方法可以在以下各项中找到:l.zhang等人的“an efficient machine learning approach for indoor localization”,中国通信(china communications),vol.14,no.11,pp.141-150,2017年11月。其中ml方法将基于网格搜索的内核支持向量机和主成分分析相结合,应用主成分分析来减少高维测量,并且设计了一种网格搜索算法来优化内核支持向量机的参数以提高定位准确度。实验结果表明,所提出的ml方法减少了定位误差,并且提高了基于k近邻、反向传播神经网络和支持向量机的方法的计算效率。
[0138]
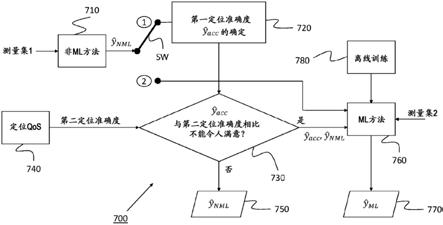
图7示意性地示出了定位过程700的示例性实施例,其中所描绘的附图标记“sw”示意性地指代两位置开关(两个位置被描绘为
①
和
②
)以帮助更好地示意性地可视化根据其来执行定位过程的两个示例性实施例。
[0139]
在第一示例阶段,确定通信设备(例如,ue)的第一位置,由表示。尽管图7的示例实施例示出了第一位置的确定是通过使用非ml模型的基于非ml的定位方法710(被描述为非ml方法)来执行的,但应当注意,在另一示例实施例中,第一位置的确定可以通过使用ml模型的基于ml的定位方法或任何其他合适的定位方法来执行。第一位置的确定包括估计通信设备的第一位置使得所确定的第一位置是通信设备的估计位置。
[0140]
基于非ml的定位方法710可以从由3gpp定义的任何定位方法中选择,诸如但不限于上述表i中列出的任何定位方法。在这点上,基于非ml的定位方法710的选择可以取决于所考虑的rat和网络中可以用于估计ue定位的可用输入,诸如wi-fi测量、定位参考信号(prs)测量、探测参考信号(srs)测量等。如图所示,基于非ml的定位方法710的非ml模型接收第一组测量(描绘为测量集1)作为输入,并且基于所接收的输入提供由表示的第一定位结果(即,通信设备的第一位置)作为输出。
[0141]
在第一示例实施例中(如图7所示,示意地对应于sw被切换到位置
①
),可以执行对第一位置的第一定位准确度的确定(由720表示),并且所述第一定位准确度可以与定位服务质量(qos)(由740表示)的目标定位准确度(描绘为第二定位准确度)进行比较(由730表示)。第一定位准确度的确定(由720表示)包括估计第一位置的定位准确度,使得所确定的第一定位准确度是第一位置的估计定位准确度。第一定位准确度是正数,该正数可以以任何合适的方式表示,例如,表示为百分比值或均方值。例如,第一定位准确度可以通过使用具有专用数据库的查找表(lut)来确定,该专用数据库被配置为针对多个基于非ml的定位方法中的每个提供对应平
均定位准确度,并且因此针对应用于确定第一位置的基于非ml的定位方法710提供对应平均定位准确度;或者第一定位准确度可以基于所选择的基于非ml的定位方法710及其参数在考虑诸如室内和室外等传播环境的同时以离线方式确定。目标定位准确度(即,第二定位准确度)例如可以是例如由3gpp版本16定义的qos结构中包括的所要求的定位准确度。
[0142]
如果比较的结果是第一定位准确度等于或大于第二定位准确度,则基于非ml的定位方法710可以被认为就确定第一位置的准确度而言是令人满意的,并且定位过程700提供第一位置(也对应于基于非ml的定位方法710的非ml模型的输出)作为输出(由750表示)。另一方面,如果比较的结果是第一定位准确度低于第二定位准确度,这表示基于非ml的定位方法710就确定第一位置的准确度而言在第二定位准确度方面不能被认为是令人满意的,则需要由第二示例阶段表示的附加阶段来相对于第一定位准确度以增加的定位准确度确定通信设备的位置,其中目的是达到qos的目标定位准确度,即,qos的第二定位准确度。第二定位准确度可以以任何合适的方式表示,例如,作为百分比值或作为均方值。
[0143]
为了减少例如由于prs传输使的任何信令开销,可以提供第二示例实施例(示意性地对应于sw被切换到位置
②
)。在第二示例实施例中,第一位置的第一位置准确度的确定720及其与qos的第二位置准确度的比较730在第一示例阶段中不执行,并且第一位置直接被提供给第二示例阶段。在该第二示例实施例中,关于第一位置的第一定位准确度的信息没有被提供给第二示例阶段,并且关于目标定位准确度的信息(即,位置qos的第二定位准确度)可以由于关于网络中的目标定位准确度的所述信息的可用性而在第二示例阶段直接被获取。
[0144]
在第二示例阶段,如果比较的结果是第一定位准确度低于第二定位准确度或者如果第一位置直接被提供给第二示例阶段(即,没有确定第一位置的第一定位准确度并且比较第一定位准确度和位置qos的第二定位准确度的步骤),则使用ml模型的基于ml的定位方法760(由ml方法表示)被应用于确定通信设备(诸如ue)的第二位置,表示为第二位置的确定包括估计通信设备的第二位置使得所确定的第二位置是通信设备的估计位置。
[0145]
基于ml的定位方法760可以基于例如但不限于诸如dnn模型、cnn模型等ann模型。如图7所示,当sw设置为位置
①
时,如果上述比较的结果是第一定位准确度低于第二定位准确度,则基于ml的定位方法760的ml模型从第一示例阶段接收通信设备的第一位置和第一定位准确度以及第二组测量(描绘为测量集2)作为输入。另一方面,当sw设置为位置
②
时,基于ml的定位方法760的ml模型从第一示例阶段接收通信设备的第一
位置以及第二组测量(描绘为测量集2)作为输入。
[0146]
定位过程700提供由表示的第二定位结果(也对应于基于ml的定位方法760的ml模型的输出)(即,通信设备的第二位置)作为输出(由770表示)。
[0147]
定位过程700可以基于有监督学习。为了使用它,ml模型的离线训练是必要的,如附图标记780所示。
[0148]
在示例实施例中,定位过程700的实时功能可以在lmf 510处实现。在示例选项中,训练可以在nwdaf 560处运行,并且然后训练数据可以通过最小化路测(mdt)测量来收集,该mdt测量的对应测量日志/报告可以包括:时间信息、rf测量和详细位置信息(例如,gnss位置信息)。由于mdt可能已经可用作nwdaf 560的输入,因此需要将已训练ml模型传输到lmf 510以便以在线方式使用。在另一示例选项中,训练和推理操作可以在lmf 510处运行。为此,有必要在lmf侧进行mdt测量,以便执行ml模型的所需要的训练。
[0149]
在其中基于ml的定位方法760将被指定为在nwdaf 560中运行的示例实施例中,lmf 510可以使用由nwdaf 560提供的api。
[0150]
因此,图7的定位过程700可以基于第一定位方法(即,图7的示例实施例中的基于非ml的定位方法710)和第二定位方法(即,图7的示例实施例中的基于ml的定位方法760)的混合使用。此外,定位过程700可以是两阶段过程,包括第一示例阶段(与基于非ml的定位方法710以及第一定位准确度与第二定位准确度之间的可选比较730有关),随后是第二示例阶段(与基于ml的定位方法760有关,其中如果上述比较的结果是第一定位准确度低于第二定位准确度或者如果第一位置直接被提供给第二示例阶段,则第一示例阶段的输出被提供给第二示例阶段的输入)。因此,图7的定位过程700可以被认为是分层混合定位(hhl)过程。
[0151]
图8示意性地示出了由笛卡尔坐标(x,y)系统内的两阶段定位过程700的基于非ml的定位方法710和基于ml的定位方法760提供的定位准确度的比较水平的示例实施例。
[0152]
可以看出,被描绘为非ml定位的基于非ml的定位方法710可以示意性地提供通信设备的第一位置的“粗略”水平的定位准确度,即,第一定位准确度在基于非ml的定位方法710的非ml模型的输出已经作为输入提供给基于ml的定位方法760的ml模型之后,被描绘为ml定位的基于ml的定位方法760可以示意性地提供通信设备的第一位置的“精细”水平的定位准确度以获取通信设备的第二位置因此,定位过程700的基于ml的定位方法760可以被示意性地视为“缩放”或“细化”方法。
[0153]
应当注意,定位过程700的第一示例阶段和第二示例阶段可以以不同时间尺度运行,这取决于在每个相应示例阶段的级别输入的第一组测量和第二组测量的可用性。
[0154]
在这点上,图9示出了在如ue等通信设备遵循笛卡尔坐标(x,y)系统内的轨迹的情况下的时间尺度表示的示例实施例。
[0155]
可以看出,与被描绘为ml定位的基于ml的定位方法760相比,被描绘为非ml定位的基于非ml的定位方法710提供更大的定位误差。因此,在不同时刻,与基于非ml的定位方法710相比,基于ml的定位方法760可以在基于非ml的定位方法710的位置范围内提供更准确的ue位置。
[0156]
图10示出了定位过程700的示例实现1000,其中基于非ml的定位方法710的非ml模型是基于utdoa的定位方法1010的utdoa模型(由utdoa表示),并且基于ml的定位方法760的ml模型是基于dnn的定位方法1060的dnn模型(由dnn表示)。
[0157]
在图10的该示例实现1000中,由第一示例阶段提供的通信设备的第一位置被描绘为(其是估计位置);由第二示例阶段提供的通信设备的第二位置被描绘为(其是估计位置);被描绘为测量集1的第一组测量可以包括srs测量和对应的配置参数;被描绘为测量集2的第二组测量可以包括由通信设备(例如,ue)报告的参考信号接收功率(rsrp)测量、和ul-toa测量。仍然在图10中,第一位置的第一定位准确度(其是估计定位准确度)的确定(由1020表示)通过使用lut来确定,该lut具有数据库1080,该数据库1080被配置为提供基于utdoa的定位方法的对应平均定位准确度;提供第二定位准确度的定位qos由1040表示;第一定位准确度与第二定位准确度之间的比较由1030表示。
[0158]
此外,在所述比较的结果是第一定位准确度等于或大于第二定位准确度的情况下,定位过程700的示例实现1000可以提供第一位置作为输出(由1050表示)。另一方面,在第一定位准确度低于第二定位准确度或者第一位置直接被提供给第二示例阶段的情况下,定位过程700的示例实现1000可以提供第二位置(也对应于基于dnn的定位方法的dnn模型的输出)作为输出(由1070表示)。
[0159]
基于dnn的定位方法1060的dnn模型可以包括神经网络,例如,自动编码器。在示例实施例中,自动编码器可以是cnn、dnn或任何其他合适的ann。
[0160]
图11示出了自动编码器1100的示例实施例。自动编码器1100可以包括编码器1110、潜在空间表示1120(也称为代码(code))和解码器1130。
[0161]
编码器1110可以包括一个或多个隐藏层并且被配置为将输入数据(被描绘为x
rsrp-toa
)压缩到潜在空间表示1120中,该输入数据可以对应于包括rsrp和ul-toa测量的第二组测量,潜在空间表示1120包括由潜在层表示的单个隐藏层,作为最中间的层。可以看出,潜在层可以从定位过程700的第一示例阶段接收通信设备的第一位置(其是估计位置),并且当第一定位准确度低于第二定位准确度时,从定位过程700的第一示例阶段接收第一位置的第一定位准确度(其是估计位置准确度),并且然后可以提供通信设备的第二位置(其是估计位置)作为输出。解码器1130可以包括一个或多个隐藏层,并且被配置为通过提供重构的输入数据(被描绘为)作为输出来从潜在空间表示重构输入数据。如图所示,编码器1110、潜在空间表示1120和解码器1130的每个隐藏层具有相应数目的神经元(也称为节点),潜在层具有最少的神经元。
[0162]
ml模型需要离线训练和训练数据或样本的提供。作为示例ml模型的自动编码器1100可以根据以下示例实施例被离线训练。
[0163]
令s是训练样本集,l是带有标签的样本集(即,具有可用的地面实况位置),u是剩余的未标记样本集。所以,s是l和u的并集。对于每个元素a∈l,我们有4元组
的可用性,其中x
rsrp-toa,a
、ya、和分别表示rsrp和ul-toa测量(x
rsrp-toa,a
)、通信设备的实际位置(ya)、通信设备的第一位置(它是由基于utdoa的定位方法1010使用utdoa模型而确定的估计位置)、以及第一定位准确度(它是正数,对应于通过使用utdoa模型的基于utdoa的定位方法1010而确定的第一位置的估计定位准确度)。对于每个元素a∈u,我们只有3元组的可用性。
[0164]
自动编码器1100的编码器1110的输入是x
r5rp-toa,a
,并且对于所有a∈s,在自动编码器1100的解码器1130的输出处,该输入被重构为然后,可以使用自动编码器1100的解码器1130的输出处的第一损失和自动编码器1100的隐层1120处的第二损失之和来训练自动编码器1100。
[0165]
解码器1130的输出处的第一损失也可以指定为自动编码器1100的重构损失,并且由以下关系式(1)给出:
[0166][0167]
潜在层1120处的第二损失可以由以下关系式(2)给出:
[0168]
可以看出,第二损失是第一损失项和第二损失项之和。第一损失项是可用标记数据的实际位置与由基于dnn的定位方法1070使用自动编码器1100而确定的通信设备的估计位置(即,第二位置)之间的均方误差(mse)损失。第二损失项是最大绝对距离(mad)损失。它用于使用自动编码器1100来限制来自第二示例阶段的估计位置(即,第二位置),以便其位于来自使用utdoa模型的第一示例阶段的相应估计位置(即,相应第一位置)周围的空间内,从而允许以较少量的标记数据来实现较高准确度。
[0169]
因此,与使用基于ml的定位方法的独立的ml模型相比,使用ml模型(例如,自动编码器1100)以及来自基于非ml的定位方法的非ml模型的估计位置可以缩短ml模型的离线训练阶段,因为ml模型需要较少量的标记数据即可实现相同水平的定位准确度。与由独立的非ml模型提供的定位准确度相比,它还允许提高定位准确度。
[0170]
图12示出了描述定位过程700的示例实施例的示例流程图1200。该示例流程图1200可以在例如lmf 510或lmf 510内的装置中实现。
[0171]
在步骤1210中,示例流程图1200的方法可以包括在第一阶段确定通信设备的第一位置
[0172]
在步骤1220中,示例流程图1200的方法可以包括从第一阶段将第一位置输入到第二阶段的ml模型。
[0173]
在步骤1230中,示例流程图1200的方法可以包括在第二阶段至少基于来自第一阶段的第一位置通过使用ml模型来确定通信设备的第二位置
[0174]
图13示出了描述由基于ml的定位方法760的ml模型执行的定位过程700的示例实施例的示例流程图1300。该示例流程图1300可以在例如lmf 510或nwdaf 560或者lmf 510或nwdaf 560内的装置中实现。
[0175]
在步骤1310中,示例流程图1300的方法可以包括在第二阶段的ml模型处接收通信设备的第一位置第一位置是在第一阶段被确定的。
[0176]
在步骤1320中,示例流程图1300的方法可以包括在第二阶段至少基于来自第一阶段的第一位置通过使用ml模型来确定通信设备的第二位置
[0177]
图14示出了具有放置在笛卡尔坐标(x,y)系统内的2000个ue设备的环境的示例实施例,其中x和y以米(m)表示。
[0178]
出于模拟的目的,有21个gnb,每个ue向21个gnb中的每个报告最强波束rsrp,并且ul-toa在每个gnb处针对2000个ue设备中的每个ue设备进行测量。在第一示例定位阶段,应用使用utdoa测量的基于非ml的定位方法,诸如基于utdoa的定位方法1010,以获取所有2000个ue设备的估计ue位置。在下一定位阶段(即,第二示例阶段),使用ml模型(诸如图11的自动编码器1100)进行定位。自动编码器1100的编码器部分1110具有两个密集隐藏层,该隐藏层分别具有128和32个神经元,自动编码器1100的潜在层1120具有两个神经元,并且自动编码器1100的解码器部分1130具有两个密集隐藏层,该隐藏层分别具有32和128个神经元。输入层和输出层都有42个神经元。自动编码器的输入x
rsrp-to-a
是由21维rsrp向量和21维toa向量组成的42维向量。输入(包括来自第一示例定位阶段的估计位置和第一定位准确度)被提供给潜在层1120。此外,为2000个样本中的1000个提供地面实况标签,并且使用解码器部分1130的输出处的上述第一损失和潜在层1120处的第二损失离线训练自动编码器1100。
[0179]
基于上述仿真参数,图15示出了针对以下三种定位方法的估计误差值(以米为单位)而绘制的累积密度函数(cdf)的示例实施例:
[0180]
·
基于(独立)utdoa的定位方法1010,使用utdoa测量作为utdoa模型的输入;
[0181]
·
基于dnn的定位方法1060,使用由utdoa模型提供给作为dnn模型的自动编码器1100(标记为ae)的估计位置和第一定位准确度;以及
[0182]
·
独立的基于dnn的定位方法1060,其自动编码器(作为dnn模型)仅在1000个样本上被训练,而不使用来自第一示例阶段的估计位置和第一定位准确度。
[0183]
下面的表ii提供了对上述三种定位方法中的每种方法在未标记的1000个样本上计算的平均估计误差(以米为单位)的描述。
[0184]
表ii:上述三种定位方法的平均估计误差(米)
[0185]
方法平均估计误差(米)
utdoa32.93utdoa ae18.45独立的dnn25.12
[0186]
表ii示出,使用ae 1100以及由utdoa模型提供的估计位置和第一定位准确度的基于dnn的定位方法1060的平均估计误差小于独立的基于dnn的定位方法和基于utdoa的定位方法的平均估计误差。应当注意,当在大量样本上执行离线训练时,独立的基于ml的定位方法的准确度增益更为显著。
[0187]
应当注意,尽管上述示例实施例,在不脱离本技术的范围的情况下,可以对所公开的解决方案进行若干变化和修改。例如,尽管图7至图14的示例实施例说明性地涉及在第一示例阶段基于使用非ml模型的基于非ml的定位方法并且在第二示例阶段基于使用ml模型的基于ml的定位方法的定位过程,但是在另一示例实施例中,所提出的定位过程可以在第一示例阶段和第二示例阶段两者基于使用ml模型的基于ml的定位方法,或者在第一示例阶段基于使用合适模型的任何其他合适的定位方法并且在第二示例阶段基于使用ml模型的基于ml的定位方法。
[0188]
因此,实施例可以在所附权利要求的范围内变化。一般而言,一些实施例可以以硬件或专用电路、软件、逻辑或其任何组合实现。例如,一些方面可以以硬件实现,而其他方面可以以可以由控制器、微处理器或其他计算设备执行的固件或软件实现,但实施例不限于此。尽管可以将各种实施例图示和描述为框图、流程图或使用一些其他图形表示,但是很好理解,作为非限制性示例,本文中描述的这些块、装置、系统、技术或方法可以以硬件、软件、固件、专用电路或逻辑、通用硬件或控制器或其他计算设备、或其某种组合来实现。
[0189]
实施例可以通过存储在存储器中并且可以由所涉及的实体的至少一个数据处理器执行的计算机软件来实现,或者通过硬件来实现,或者通过软件和硬件的组合来实现。进一步,在这点上,应当注意,上述过程中的任何一个可以表示程序步骤、或者互连的逻辑电路、块和功能、或者程序步骤和逻辑电路、块和功能的组合。软件可以存储在物理介质上,诸如存储器芯片或在处理器内实现的存储器块、诸如硬盘或软盘等磁介质、以及诸如dvd及其数据变体cd等光学介质。
[0190]
存储器可以是适合本地技术环境的任何类型并且可以使用任何适合的数据存储技术来实现,诸如基于半导体的存储器设备、磁存储器设备和系统、光学存储器设备和系统、固定存储器和可移动存储器。数据处理器可以是适合本地技术环境的任何类型,并且作为非限制性示例,可以包括通用计算机、专用计算机、微处理器、数字信号处理器(dsp)、专用集成电路(asic)、门级电路和基于多核处理器架构的处理器中的一种或多种。
[0191]
替代地或另外地,一些实施例可以使用电路系统来实现。该电路系统可以被配置为执行先前描述的功能和/或方法步骤中的一个或多个。该电路系统可以设置在基站和/或通信设备中。
[0192]
如本技术中使用的,术语“电路系统”可以指代以下中的一种或多种或全部:
[0193]
(a)纯硬件电路实现(诸如仅使用模拟和/或数字电路系统的实现);
[0194]
(b)硬件电路和软件的组合,例如:
[0195]
(i)模拟和/或数字硬件电路与软件/固件的组合,以及
[0196]
(ii)具有软件的硬件处理器(包括数字信号处理器)、软件和存储器的任何部分,
其一起工作以使装置(诸如通信设备或基站)执行各种先前描述的功能;以及
[0197]
(c)硬件电路和/或处理器,诸如微处理器或微处理器的一部分,其需要软件(例如,固件)进行操作,但软件可在操作不需要时能不存在。
[0198]
该电路系统的定义适用于该术语在本技术中的所有使用,包括在任何权利要求中。作为另一示例,如在本技术中使用的,术语电路系统还涵盖仅硬件电路或处理器(或多个处理器)或硬件电路或处理器的一部分及其(或它们的)随附软件和/或固件的实现。术语电路系统还涵盖例如集成设备。
[0199]
前述描述通过示例性和非限制性示例的方式提供了对一些实施例的完整并且信息丰富的描述。然而,当结合附图和所附权利要求书阅读时,鉴于前述描述,各种修改和适配对于相关领域的技术人员来说可能变得很清楚。然而,教导的所有这样的和类似修改仍将落入在所附权利要求中限定的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。