1.本发明用于自动驾驶车辆的轨迹预测,更具体涉及包括本车意图识别、本车周围车辆历史状态和摄像头输出车道线信息处理在内的轨迹预测技术。
背景技术:
2.在自动驾驶中,自动驾驶车辆通过内部车体传感器和对环境道路感知的外部传感器采集信息,环境认知算法基于该感知信息对自动驾驶环境进行理解,然后将结果下发到规划控制模块计算对应的控制指令给车辆执行,最后完成自动驾驶任务。其中,环境认知除了对自动驾驶车辆所在环境的理解外,还需要对自身状态进行计算。自动驾驶车辆的轨迹预测则是环境认知模块对接收到的感知信息进行理解,最终输出自身所处环境。
3.现有自动驾驶车辆的轨迹预测方案主要有两类,基于学习方法的数据驱动类和传统方法。专利文献cn201910654009.7公开了一种基于本车周围车辆轨迹预测安全行驶的方法,其利用神经网络方法对本车及其周围车辆的历史轨迹进行运算处理,得到本车轨迹预测结果。该方法隶属于学习类,对数据库要求较高,且该类方法可解释性较差,工程应用受到计算力和成本的限制。另一类传统方法主要考虑基于本车传感信息和外部传感信息得到的历史轨迹进行简化的拟合计算和轨迹筛选,具有传感局限性。
技术实现要素:
4.本发明提供一种基于自动驾驶的本车轨迹预测方法、系统、车辆及计算机可读存储介质,目的是为自动驾驶车辆轨迹预测提供一个有效可行的工程方案。基于该预测轨迹,使自动驾驶车辆有更强的危险处理能力,通过方案可改善结构化道路自动驾驶性能,同时适用于复杂驾驶环境,提高自动驾驶车辆对周围复杂环境处理能力,同时提高自动驾驶安全性和乘坐舒适性。
5.本发明的技术方案如下:第一方面,本发明提出一种自动驾驶的本车轨迹预测方法,其包括步骤如下:步骤1,本车意图预测模块接收感知地图信息,对本车所处场景进行识别,输出场景标志位。
6.步骤2,根据输出的场景标志位,进入对应的场景轨迹生成模块,生成相应的轨迹,输出给本车运动模型。
7.具体地:如果标志位是0,则进入acc场景轨迹生成模块;如果标志位是1,则进入驾驶员主动换道场景轨迹生成模块;如果标志位是2,则进入自动驾驶换道场景轨迹生成模块;如果标志位是3,则进入掉头场景轨迹生成模块;如果标志位是4,则进入十字路口场景轨迹生成模块。
8.步骤3,同时,当滤波模块接收到本车信息后,对信号进行滤波处理输出给本车运动模型。
9.步骤4,本车运动模型在接收到处理后的本车信息后,结合对应轨迹生成模块生成的轨迹,通过运动模型表征的ekf过程模型对轨迹进行预测,输出预测轨迹。
10.步骤5,同时,当车道线和目标融合模块接收到感知输出的目标和车道线等数据后,首先根据目标历史状态轨迹拟合一条三次曲线,然后将该曲线与车道线进行融合,最终输出融合目标历史轨迹的车道线信息。
11.步骤6,ekf-本车轨迹预测模块接收拟合的本车轨迹和融合目标历史轨迹的车道线相关信息,结合车道线和目标融合模块表征的ekf测量模型、本车运动模型模块表征的ekf过程模型,输出基于ekf融合的最终本车轨迹。
12.第二方面,本发明提出一种自动驾驶的本车轨迹预测系统,其包括:本车意图预测模块,用于接收感知地图信息,对本车所处场景进行识别,输出场景标志位。
13.场景轨迹生成模块,用于根据输出的场景标志位,进入对应的场景轨迹生成模块,生成相应的轨迹,输出给本车运动模型。
14.滤波模块,用于接收到本车信息,对信号进行滤波处理输出给本车运动模型。
15.本车运动模型,在接收到处理后的本车信息后,结合对应轨迹生成模块生成的轨迹,通过运动模型表征的ekf过程模型对轨迹进行预测,输出预测轨迹。
16.车道线和目标融合模块,用于当车道线和目标融合模块接收到感知输出的目标和车道线等数据后,首先根据目标历史状态轨迹拟合一条三次曲线,然后将该曲线与车道线进行融合,最终输出融合目标历史轨迹的车道线信息。
17.ekf-本车轨迹预测模块,接收拟合的本车轨迹和融合目标历史轨迹的车道线相关信息,结合车道线和目标融合模块表征的ekf测量模型、本车运动模型模块表征的ekf过程模型,输出基于ekf融合的最终本车轨迹。
18.第三方面本发明提出一种车辆,包括上述自动驾驶的本车轨迹预测系统。
19.第四方面,本发明还提出一种计算机可读存储介质,其上存储有计算机程序,该程序能够被处理器加载和运行以执行上面所述的自动驾驶的本车轨迹预测方法。
20.本发明具有如下优点:本发明结合了本车意图预测,包括驾驶员主动换道和自动驾驶换道检测、掉头场景和十字路口场景等检测,再结合历史状态信息和车道线信息,针对不同场景设计本车轨迹预测方法,与基于学习类方案比较,对数据库要求更宽松,同时量产化过程中对设备计算能力要求更低,降低了成本,同时可解释更高。本发明与传统只考虑历史轨迹方案比较,增添意图识别逻辑,针对不同场景对轨迹进行准确性设计,同时考虑摄像头输出车道线补偿历史轨迹计算结果,使得预测轨迹准确性提高。
21.本发明以自动驾驶车辆车体坐标为参考,输出自身与车道的关系,并给出预测轨迹,在自动驾驶应用中结合该轨迹与目标障碍物预测轨迹,可预测碰撞风险,为规划控制层提前给出解决方案保证自动驾驶车辆安全的同时提升乘坐体验。
附图说明
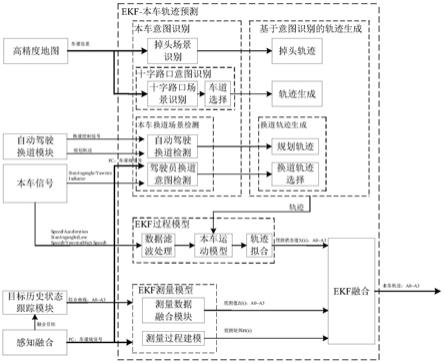
22.图1为本发明的原理框图;图2为本发明的逻辑流程图。
具体实施方式
23.下面结合附图和具体实例对本发明的实施方案作进一步详细说明。本实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式,此处所述的具体实施例不限制本发明的使用方案。
24.参见图1,本实施例是一种自动驾驶本车轨迹预测系统,其包括有以下功能模块:本车意图预测模块,用于接收感知地图信息,对本车所处场景进行识别,输出场景标志位。具体地,本车意图预测模块是利用地图定位信息、本车历史轨迹信息和目标历史轨迹信息,对场景进行识别并对本车意图进行预测,输出场景标志位flag。
25.场景轨迹生成模块,用于根据输出的场景标志位flag,进入对应的场景轨迹生成模块,生成相应的轨迹,输出给本车运动模型。
26.具体地,场景轨迹生成模块包括:acc场景轨迹生成模块,对应标志位flag是0;驾驶员主动换道场景轨迹生成模块,对应标志位flag是1;自动驾驶换道场景轨迹生成模块,对应标志位flag是2;掉头场景轨迹生成模块,对应标志位flag是3;十字路口场景轨迹生成模块,对应标志位flag是4。
27.滤波模块,用于接收到本车信息,对信号进行滤波处理输出给本车运动模型。
28.本车运动模型,在接收到处理后的本车信息后,结合对应轨迹生成模块生成的轨迹,通过运动模型表征的ekf过程模型对轨迹进行预测,输出预测轨迹。
29.车道线和目标融合模块,用于当车道线和目标融合模块接收到感知输出的目标和车道线等数据后,首先根据目标历史状态轨迹拟合一条三次曲线,然后将该曲线与车道线进行融合,最终输出融合目标历史轨迹的车道线信息。
30.ekf-本车轨迹预测模块,接收拟合的本车轨迹和融合目标历史轨迹的车道线相关信息,结合车道线和目标融合模块表征的ekf测量模型、本车运动模型模块表征的ekf过程模型,输出基于ekf融合的最终本车轨迹。
31.参见图2,本实施例是自动驾驶本车轨迹预测方法,其步骤具体如下:1、当本车意图预测模块接收到感知输出的高精度地图信息、本车状态和目标状态信息后,对本车所处场景进行识别,利用地图定位信息、本车历史轨迹信息和目标历史轨迹信息,对场景进行识别并对本车意图进行预测,输出场景标志位flag。
32.2、如果场景标志位值为0,即flag=0,则进入acc场景轨迹生成模块,该模块基于自动驾驶车辆沿着当前车道行驶的意图预测,输出本车预测轨迹。
33.3、如果场景标志位值为1,即flag=1,则进入驾驶员主动换道场景轨迹生成模块,本模块进一步接收本车方向盘信号和yawrate(横摆角速度)信号以检测换道方向,并结合感知输出目标信息,基于本车换道最优轨迹选择本车预测轨迹。
34.4、如果场景标志位值为2,即flag=2,则进入自动驾驶换道场景轨迹生成模块,该
模块基于自动驾驶换道规划轨迹输出本车预测轨迹。
35.5、如果场景标志位值为3,即flag=3,则进入十字路口场景轨迹生成模块,该模块结合感知输出地图信息、上层规划信息和本车状态信息,采用lstm算法对本车意图进行预测,基于意图预测选择的车道信息输出本车预测轨迹。
36.6、如果场景标志位值为4,即flag=4,则进入掉头场景轨迹生成模块,该模块基于自动驾驶车辆掉头行驶的意图预测,输出本车预测轨迹。
37.7、当本车信息一阶滤波模块接收到本车信息后,包括车速、方向盘转角和角速度等信息,对信号进行一阶滤波处理输出。
38.8、当车道线和目标融合模块接收到感知输出目标和车道线相关信息后,将目标历史状态拟合一条三次曲线,输出融合该曲线和车道线后的轨迹信息。
39.9、当本车运动模型模块接收到预测意图和预处理的本车信息后,通过运动模型表征的ekf过程模型对轨迹进行预测,输出预测轨迹。
40.10、当ekf-本车轨迹预测模块接收到拟合的本车轨迹和融合的车道线相关信息后,结合车道线和目标融合模块表征ekf测量模型,本车运动模型模块表征的ekf过程模型,输出基于ekf融合的最终本车轨迹。
41.在上述说明书中,已经通过参考特定的示例描述了本发明的主旨内容。然而,在不脱离如权利要求书所阐述的本发明的主旨内容的情况下,可以进行各种修改和改变。本说明书中的附图是说明性而不是限制性的。因此,本发明的主旨范围应当由权利要求及其符合法律规定的等效形式或实体确定,而非仅由所描述的示例确定。在本说明书任何方法或过程权利要求中所阐述的任何步骤可以按任何次序或次序组合执行,并不受限于所述权利要求中所给出的示例性特定次序。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。