技术特征:
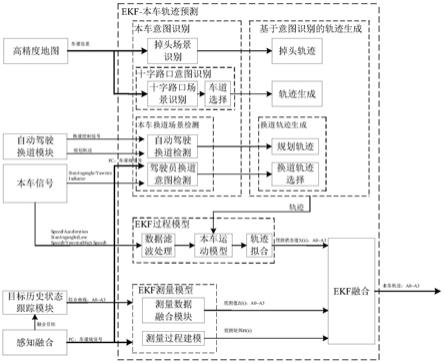
1.一种自动驾驶的本车轨迹预测方法,其特征在于,包括步骤如下:步骤1,本车意图预测模块接收感知地图信息,对本车所处场景进行识别,输出场景标志位;步骤2,根据输出的场景标志位,进入对应的场景轨迹生成模块,生成相应的轨迹,输出给本车运动模型;步骤3,同时,当滤波模块接收到本车信息后,对信号进行滤波处理输出给本车运动模型;步骤4,本车运动模型在接收到处理后的本车信息后,结合对应轨迹生成模块生成的轨迹,通过运动模型表征的ekf过程模型对轨迹进行预测,输出预测轨迹;步骤5,同时,当车道线和目标融合模块接收到感知输出的目标和车道线等数据后,首先根据目标历史状态轨迹拟合一条三次曲线,然后将该曲线与车道线进行融合,最终输出融合目标历史轨迹的车道线信息;步骤6,ekf-本车轨迹预测模块接收拟合的本车轨迹和融合目标历史轨迹的车道线相关信息,结合车道线和目标融合模块表征的ekf测量模型、本车运动模型模块表征的ekf过程模型,输出基于ekf融合的最终本车轨迹。2.根据权利要求1所述的自动驾驶的本车轨迹预测方法,其特征在于,所述步骤1中,本车意图预测模块是利用地图定位信息、本车历史轨迹信息和目标历史轨迹信息,对场景进行识别并对本车意图进行预测,输出场景标志位flag。3.根据权利要求1所述的自动驾驶的本车轨迹预测方法,其特征在于,所述步骤2中:如果标志位是0,则进入acc场景轨迹生成模块;如果标志位是1,则进入驾驶员主动换道场景轨迹生成模块;如果标志位是2,则进入自动驾驶换道场景轨迹生成模块;如果标志位是3,则进入掉头场景轨迹生成模块;如果标志位是4,则进入十字路口场景轨迹生成模块。4.根据权利要求3所述的自动驾驶的本车轨迹预测方法,其特征在于所述acc场景轨迹生成模块是基于自动驾驶车辆沿着当前车道行驶的意图预测,输出本车预测轨迹;所述驾驶员主动换道场景轨迹生成模块是接收本车方向盘信号和yawrate信号以检测换道方向,并结合感知输出目标信息,基于本车换道最优轨迹选择本车预测轨迹;所述自动驾驶换道场景轨迹生成模块是基于自动驾驶换道规划轨迹输出本车预测轨迹;所述十字路口场景轨迹生成模块是结合感知输出地图信息、上层规划信息和本车状态信息,采用lstm算法对本车意图进行预测,基于意图预测选择的车道信息输出本车预测轨迹;所述掉头场景轨迹生成模块是基于自动驾驶车辆掉头行驶的意图预测,输出本车预测轨迹。5.根据权利要求1所述的自动驾驶的本车轨迹预测方法,其特征在于所述滤波模块接收的本车信息包括车速、方向盘转角和角速度等信息。6.一种自动驾驶的本车轨迹预测系统,其特征在于,包括:本车意图预测模块,用于接收感知地图信息,对本车所处场景进行识别,输出场景标志
位;场景轨迹生成模块,用于根据输出的场景标志位,进入对应的场景轨迹生成模块,生成相应的轨迹,输出给本车运动模型;滤波模块,用于接收到本车信息,对信号进行滤波处理输出给本车运动模型;本车运动模型,在接收到处理后的本车信息后,结合对应轨迹生成模块生成的轨迹,通过运动模型表征的ekf过程模型对轨迹进行预测,输出预测轨迹;车道线和目标融合模块,用于当车道线和目标融合模块接收到感知输出的目标和车道线等数据后,首先根据目标历史状态轨迹拟合一条三次曲线,然后将该曲线与车道线进行融合,最终输出融合目标历史轨迹的车道线信息;ekf-本车轨迹预测模块,接收拟合的本车轨迹和融合目标历史轨迹的车道线相关信息,结合车道线和目标融合模块表征的ekf测量模型、本车运动模型模块表征的ekf过程模型,输出基于ekf融合的最终本车轨迹。7.根据权利要求6所述的自动驾驶的本车轨迹预测系统,其特征在于,所述本车意图预测模块是利用地图定位信息、本车历史轨迹信息和目标历史轨迹信息,对场景进行识别并对本车意图进行预测,输出场景标志位flag。8.根据权利要求6所述的自动驾驶的本车轨迹预测系统,其特征在于,所述场景轨迹生成模块包括,acc场景轨迹生成模块,对应标志位是0;驾驶员主动换道场景轨迹生成模块,对应标志位是1;自动驾驶换道场景轨迹生成模块,对应标志位是2;掉头场景轨迹生成模块,对应标志位是3;十字路口场景轨迹生成模块,对应标志位是4。9.一种车辆,其特征在于,包括权利要求6-8任一项所述的自动驾驶的本车轨迹预测系统。10.一种计算机可读存储介质,其特征在于,其上存储有计算机程序,该程序能够被处理器加载和运行以执行权利要求1至5中任一项所述的自动驾驶的本车轨迹预测方法。
技术总结
本发明提供一种基于自动驾驶的本车轨迹预测方法、系统、车辆及计算机可读存储介质,所述方法是结合本车意图预测,包括驾驶员主动换道和自动驾驶换道检测、掉头场景和十字路口场景等检测,再结合历史状态信息和车道线信息,针对不同场景设计本车轨迹预测,以自动驾驶车辆车体坐标为参考,输出自身与车道的关系,并给出预测轨迹,在自动驾驶应用中结合该轨迹与目标障碍物预测轨迹,可预测碰撞风险,为规划控制层提前给出解决方案保证自动驾驶车辆安全的同时提升乘坐体验。全的同时提升乘坐体验。全的同时提升乘坐体验。
技术研发人员:游虹 邱利宏 孔周维
受保护的技术使用者:重庆长安汽车股份有限公司
技术研发日:2022.01.05
技术公布日:2022/5/5
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。