一种搭载自动变速器的电动汽车nvh抑制装置及方法
技术领域
1.本发明涉及一种搭载自动变速器的电动汽车nvh抑制装置及方法。
背景技术:
2.由于驱动电机追求高功率密度、高转矩密度、轻量小型化等要求,使得其电磁噪声问题比较突出,导致了其对电机总体噪声声压级大小贡献最大。当前在大部分稳态工况下,电动汽车的整车nvh特性已经有了较好的成效,驾驶员几乎感觉不到不良的驾乘舒适性。已有相关研究表明:高频电磁噪声对电机的总体噪声声压级的贡献最大,这类电磁噪声会随着负载的增大而噪声声压级显著增大。尤其在某些恶劣工况和驾驶员较大的驱动需求下,电机会产生的更为严重高频噪声,该噪声的人主观感受为“滋滋”的高频电磁噪声。发动机在急加速时也有相应的噪声加剧效应。长时间处于该环境中,会使驾驶人产生烦躁、头痛等生理反应,严重影响驾驶安全。
技术实现要素:
3.为了解决上述技术问题,本发明提供一种成本低下,能够减小电机的高频电磁噪声并改善电动汽车的服役环境、提升驾驶员驾驶安全性的nvh抑制装置及方法。
4.本发明采用的技术方案是:一种搭载自动变速器的电动汽车nvh抑制装置,包括驱动电机、自动变速器、润滑液压系统、mcu控制器、tcu控制器、整车控制器、can总线、阈值判断单元及高频nvh抑制解算单元;所述驱动电机与自动变速器连接,润滑液压系统对自动变速器润滑;mcu控制器和tcu控制器分别连接驱动电机与润滑液压系统;高频nvh抑制解算单元的输入端、mcu控制器、tcu控制器分别通过阈值判断单元与can连接;整车控制器与can总线相连;高频nvh抑制解算单元的输出端分别连接mcu控制器和tcu控制器。
5.一种利用上述的搭载自动变速器的电动汽车nvh抑制装置的搭载自动变速器的电动汽车nvh抑制方法,包括以下步骤:
6.1)整车控制器提供当前时刻的实际车速信号、下一时刻的目标车速信号、当前时刻的自动变速器润滑流量信号、下一时刻的自动变速器润滑流量信号至can总线上;
7.2)阈值判断单元对当前时刻的电机实际转速和下一时刻的电机目标转速之差进行阈值判断,若下一时刻的电机目标转速与当前时刻的电机实际转速之差大于目标阈值,进行下一步,否则,返回步骤1);
8.3)开启高频nvh抑制解算单元,拦截整车控制器在下一时刻所发送的电机目标转速信号和自动变速器润滑流量信号,解算单元对所拦截的信号值进行修正,再发送至mcu控制器和tcu控制器;直至下一时刻的电机目标转速与当前时刻的电机实际转速之差小于目标阈值,关闭高频nvh抑制解算单元,恢复整车控制器直接发送的下一时刻的电机目标转速信号和下一时刻的自动变速器润滑流量信号。
9.上述的搭载自动变速器的电动汽车nvh抑制方法中,阈值判断单元的判断公式如下:
[0010][0011]
式中,v
m 1
代表第m 1个时刻的车速信号,即下一时刻的目标车速信号;vm代表第m个时刻的车速信号,即当前时刻的实际车速信号;n0代表目标阈值,常数;1000v
m 1
i/(120πr)为下一时刻的电机目标转速;1000vmi/(120πr)为当前时刻的电机实际转速;i代表自动变速器速比,r为车轮半径;
[0012]
其中,下一时刻的电机目标转速1000v
m 1
i/(120πr)根据下一时刻的目标车速信号v
m 1
换算,而下一时刻的目标车速信号v
m 1
是由驾驶员加速踏板开度决定:v
m 1
=abv
max
,v
max
代表整车最大车速;a代表驾驶员加速踏板开度,b代表车速与加速踏板开度之间的转换修正系数;驾驶员加速踏板开度越大,整车车速越高,电机转速越高。
[0013]
上述的搭载自动变速器的电动汽车nvh抑制方法中,高频nvh抑制解算单元对下一时刻的电机目标转速的修正信号n
tm 1
的计算公式为:
[0014][0015]
式中,n
tm 1
为下一时刻的电机目标转速的修正信号;k为电机的最大转速,常数;x为修正系数,取值为整数,取值区间为[1,(120πrk)/(1000v
m 1
i-1000vmi)];
[0016]
高频nvh抑制解算单元对下一时刻的自动变速器润滑流量的修正信号q
m 1
的计算公式为:
[0017][0018]
式中,q
m 1
为下一时刻的自动变速器润滑流量的修正信号;qm为当前时刻的自动变速器润滑流量信号;q1为自动变速器的最小润滑流量;p为流量修正系数且p>1。
[0019]
与现有技术相比,本发明的有益效果在于:本发明通过将下一时刻的电机目标转速和当前时刻的电机实际转速之差作为整车急加速判别条件,在牺牲部分动力性的情况下,来对下一时刻的电机目标转速信号以及自动变速器润滑流量信号进行修正,再将其发送至mcu控制器和tcu控制器。即整车在急加速时进行中间干预,通过减小电机的目标转速信号和自动变速器润滑流量信号,来最大程度的降低电机和整车在加速过程中的负载阻力大小,以改善电动汽车在加速动态过程中的nvh特性。本发明结构简单,能够提升电动汽车的服役质量,避免高频电磁噪声的出现,较好的优化驾驶员的驾驶环境。
附图说明
[0020]
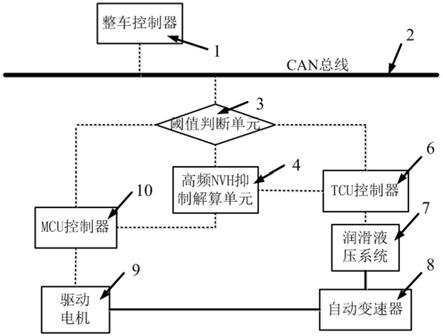
图1为本发明的搭载自动变速器的电动汽车nvh抑制装置的结构示意图。
[0021]
图2为本发明的搭载自动变速器的电动汽车nvh抑制方法的流程图。
具体实施方式
[0022]
下面结合附图对本发明作进一步的说明。
[0023]
如图1所示,本发明的搭载自动变速器的电动汽车nvh抑制装置,包括驱动电机9、
自动变速器8、润滑液压系统7、mcu控制器10、tcu控制器6、整车控制器1、can总线2、阈值判断单元3、阈值判断单元5及高频nvh抑制解算单元4。所述驱动电机9与自动变速器8连接,自动变速器8与润滑液压系统7连接;润滑液压系统7对自动变速器8进行润滑。mcu控制器10和tcu控制器6分别连接驱动电机9与润滑液压系统7;高频nvh抑制解算单元4的输入端、mcu控制器10、tcu控制器6分别通过阈值判断单元3与can总线2连接。整车控制器1与can总线2相连;高频nvh抑制解算单元4的输出端分别连接mcu控制器10和tcu控制器6。
[0024]
驾驶员在急加速时,由于驾驶员加速踏板开度过高,电机目标转速会急速升高,从而引起过大的电机目标转速与实际转速之差。整车为了快速的跟上电机目标转速来满足急剧加速需求时,会引起其加速阻力急剧升高,进而导致电机输出功率的大幅上升以及电机输出驱动力矩的急剧升高,并产生过大的电机转矩响应冲击,从而致使电机本体所承受的负载大幅增加,并引起较大的高频电磁噪声。即当前时刻的电机实际转速和下一时刻的电机目标转速之差对于电动汽车nvh具有影响。
[0025]
一种搭载自动变速器的电动汽车nvh抑制方法,包括以下步骤:
[0026]
1)整车控制器提供当前时刻的实际车速信号、下一时刻的目标车速信号、当前时刻的自动变速器润滑流量信号、下一时刻的自动变速器润滑流量信号至can总线上;
[0027]
2)阈值判断单元对当前时刻的电机实际转速和下一时刻的电机目标转速之差进行阈值判断,若下一时刻的电机目标转速与当前时刻的电机实际转速之差大于目标阈值,进行下一步,否则,返回步骤1);
[0028]
阈值判断单元的判断公式如下:
[0029][0030]
式中,v
m 1
代表第m 1个时刻的车速信号,即下一时刻的目标车速信号;vm代表第m个时刻的车速信号,即当前时刻的实际车速信号;n0代表目标阈值,常数;1000v
m 1
i/(120πr)为下一时刻的电机目标转速;1000vmi/(120πr)为当前时刻的电机实际转速;i代表自动变速器速比,r为车轮半径。
[0031]
其中,下一时刻的电机目标转速1000v
m 1
i/(120πr)根据下一时刻的目标车速信号v
m 1
换算,而下一时刻的目标车速信号v
m 1
是由驾驶员加速踏板开度决定:v
m 1
=abv
max
,v
max
代表整车最大车速;a代表驾驶员加速踏板开度,b代表车速与加速踏板开度之间的转换修正系数。驾驶员加速踏板开度越大,整车车速越高,电机转速越高。
[0032]
3)开启高频nvh抑制解算单元,拦截整车控制器在下一时刻所发送的电机目标转速信号和自动变速器润滑流量信号,解算单元对所拦截的信号值进行修正,再发送至mcu控制器和tcu控制器;直至下一时刻的电机目标转速与当前时刻的电机实际转速之差小于目标阈值,关闭高频nvh抑制解算单元,恢复整车控制器直接发送的下一时刻的电机目标转速信号和下一时刻的自动变速器润滑流量信号。
[0033]
高频nvh抑制解算单元对下一时刻的电机目标转速的修正信号n
tm 1
的计算公式为:
[0034]
[0035]
式中,n
tm 1
为下一时刻的电机目标转速的修正信号;k为电机的最大转速,常数;x为修正系数,取值为整数,取值区间为[1,(120πrk)/(1000v
m 1
i-1000vmi)];
[0036]
高频nvh抑制解算单元对下一时刻的自动变速器润滑流量的修正信号q
m 1
的计算公式为:
[0037][0038]
式中,q
m 1
为下一时刻的自动变速器润滑流量的修正信号;qm为当前时刻的自动变速器润滑流量信号;q1为自动变速器的最小润滑流量;p为流量修正系数且p>1。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
