1.本发明属于无人机技术领域,涉及一种无人机饱和攻击的在线快速自主占位方法。
背景技术:
2.伴随科学技术日新月异的发展,无人机协同作战系统的概念在军事领域和运用也越来越多,但是成本低廉的单个无人机无法对敌方防空严密的高价值的地面目标造成有效的毁伤,通过使用低成本的无人机群饱和攻击技术,对高价值目标从各个方向同时发起的攻击,可以使其防空体系进入顾此失彼的过饱和状态,从而使部分无人机能够成功突防,完成对目标的打击任务。
3.目前针对上述任务场景的研究成果较少,现有的方法在自主性上还有欠缺,同时也不利于在线计算:对于无人机饱和攻击位置点的计算,现有方法通过提前指定的方式来实现,但是对于瞬息变化的战场态势而言,在无人机飞行过程中有可能出现位置点需要改变的情况,如此之前指定好的位置点就会失效,导致这次任务失败。
技术实现要素:
4.要解决的技术问题
5.为了避免现有技术的不足之处,本发明提出一种无人机饱和攻击的在线快速自主占位方法,能够减少位置点计算耗时的同时提高无人机群攻击过程中的自主性。
6.首先将该问题简化为:在二维平面上任意圆上任意初始位置几个点,经以下算法步骤实现这些点在该圆上的均匀分布,圆上任意初始位置的点可以视为无人机到达攻击圈上后的虚拟初始位置。然后算法计算结果是将这些初始位置点均匀分布在攻击圈上,视为各个无人机到达攻击圈上占位的最终位置点。该算法适用于无人机群起飞后或者巡航状态下给定攻击目标自主攻击的场景。
7.技术方案
8.一种无人机饱和攻击的在线快速自主占位方法,包括以下步骤:
9.步骤1:初始化攻击目标的位置坐标(l
t
,ρ
t
)、防空区域半径大小d、攻击半径大小r(r>d)、各无人机起飞位置点(l0,ρ0),有n架无人机参与任务;
10.步骤2:当各无人机到达攻击圈上时,所有无人机初始位置坐标为p1:(la,ρ1),p2:(la,ρ2),
…
,pn:(la,ρn);
11.步骤3:计算pi和p
i 2
两位置点的内、外中位点方位角,公式如下:
[0012][0013]
其中i∈[1,n-2),当i=n-1时,公式为:
[0014][0015]
步骤4:求相邻两位置点间弧长,弧长计算公式如下:
[0016][0017]
步骤5:设计位置点均匀分布协议公式如下,其中k为分布增益,其值需满足0<λk<1,
[0018][0019]
其中判断函数ji的公式为:
[0020]ji
=atan2(sin(ρ
i 2-ρi),cos(ρ
i 2-ρi)),其中i∈[1,n-1];
[0021]
步骤6:给出快速均匀分布协议公式如下,用于各无人机的期望位置点快速均匀分布,其中λ为仿真步长,这里λ取值为0.01:
[0022][0023]
步骤7:给出均匀分布误差函数的计算公式,通过步骤4中弧长计算公式的结果计算,用于检验所有的位置点是否完成均匀分布,公式如下:
[0024]
其中ei=l
i 1-li;
[0025]
步骤8:循环重复计算步骤3到7,直到步骤7中的均匀分布误差函数的值小于10-3
,此时说明无人机在攻击圈上的各期望位置点已趋近于均匀分布,则计算结果有效;该结果作为最终无人机饱和攻击时在攻击圈上的期望位置点,用于指导无人机在飞行过程中到达准确到达攻击圈上各自的期望位置。
[0026]
有益效果
[0027]
本发明提出的一种无人机饱和攻击快速自主占位方法,首先初始化攻击目标位置坐标、其防空覆盖区域半径大小、攻击圈半径大小和参与任务的无人机数量和起飞位置坐标;然后根据假设的虚拟初始位置点开始算法计算流程,计算i和i 2两点之间中点位置,并计算内外中位点方位角公式;接着求出根据弧长公式求出相邻两点之间弧长,求解位置点均匀分布协议公式和快速均匀分布协议公式,最后根据均匀分布误差函数确定各位置点是否已经完成分布。本发明方法提供了无人机饱和攻击时的一直快速自主占位方法,能够让无人机群在线自主选择攻击位置点,提高饱和攻击任务的成功率。
[0028]
由于采用了本发明提出的一种无人机饱和攻击快速占位方法,可以让无人机群能
够在飞行中快速获得各自位置点,相较于事先指定位置点,此方法在任务过程中自主性高,可在线计算且计算迅速,能够更快更高效的让无人机群形成对目标的饱和攻击态势。
附图说明
[0029]
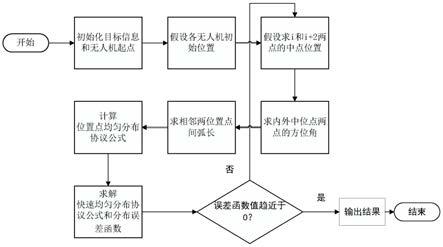
图1本发明中具体实施步骤的流程图
[0030]
图2初始位置点图
[0031]
图3位置点均匀过程图
[0032]
图4位置点均匀结果图
具体实施方式
[0033]
现结合实施例、附图对本发明作进一步描述:
[0034]
本发明的目的是提供一种无人机饱和攻击时的在线自主快速占位算法,该方法能够在无人机群起飞后或者巡航时提供一种在线自主快速位置点计算方法,能够让无人机自主进入各自的位置点,快速对打击目标形成一种饱和攻击态势,并解决现有方法的不具备自主性、离线计算的缺点,提高无人机饱和攻击时的成功率。
[0035]
如图1所示,一种无人机饱和攻击时的在线自主快速占位方法,包括以下步骤:
[0036]
步骤1:初始化攻击目标的位置坐标(l
t
,ρ
t
)、防空区域半径大小d、攻击半径大小r(r>d)、各无人机起飞位置点(l0,ρ0),有n架无人机参与任务;
[0037]
步骤2:假设各无人机在攻击圈上初始位置为(la,ρ1),(la,ρ2),
…
(la,ρn);
[0038]
步骤3:i和i 2两点之间中点位置公式为:
[0039]mi,i 1
:[0.5
×
(sinρi sinρ
i 2
),0.5
×
(cosρi cosρ
i 2
)],其中i∈(1,n);
[0040]
步骤4:定义内外中位点方位角公式为:
[0041]
其中i∈(1,n);
[0042]
步骤5:求相邻两位置点间弧长,弧长计算公式如下:
[0043][0044]
步骤6:定义判断函数为:
[0045]
p
i,i 1
=atan2(sin(ρ
i 2-ρi),cos(ρ
i 2-ρi)),其中i∈(1,n);
[0046]
步骤7:定义位置点均匀分布协议公式为:
[0047][0048]
步骤8:定义快速均匀分布协议公式为:
[0049][0050]
步骤9:定义均匀分布误差函数为:其中ei=l
i 1-li;
[0051]
步骤10:循环重复计算步骤3到10,直到步骤9中的均匀分布误差函数的值接近于0。
[0052]
具体实施例:
[0053]
本实施例假定参与饱和攻击的无人机数量为五架,起飞点与饱和各攻击位置点在同一高度,将位置点计算问题简化为二维平面任意圆上的位置点均匀分布问题。
[0054]
以目标为原点建立极坐标系,并确定无人机群起飞点坐标,目标防空覆盖区域半径,并任意假设各无人机在攻击圈上的初始位置点,以此为初始条件开始算法计算流程。
[0055]
算法主要求解一下五部分公式:
[0056]
1、计算i和i 2两点之间中点位置公式,用于接下来计算内外中位点方位角公式;
[0057]
2、计算内外中位点的方位角公式;
[0058]
3、计算相邻两位置点间弧长公式;
[0059]
4、根据2计算结果求解位置点均匀分布协议公式;
[0060]
5、根据4计算结果求解快速均匀分布协议公式,更新一次所有的位置点坐标并计算均匀分布误差函数;
[0061]
按照该流程循环求解每个部分公式,直至均匀分布误差函数趋近于零时,此时各个位置点已经趋近于在攻击圈上均匀分布,可以作为无人机飞行过程的目标位置点,引导各无人机进入各自位置点,等待攻击指令。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。