1.本发明涉及工程车辆技术领域,尤其涉及一种轮履复合移动平台。
背景技术:
2.应急救援复杂环境中的物资和人员需要通过工程车辆运输平台作业。由于执勤环境往往较为复杂,往往对工程车辆的全地形适应性能要求较高。
3.相关技术中,工程车辆运输平台主要分为轮式和履带式底盘。轮式底盘多在城市环境中应用,这类机器人主要是在良好道路环境下进行作业,对于非结构地形和爬楼梯等作业环境则往往无法进行正常作业。履带式底盘主要是针对非结构化地形设计,能够在草地、雪地、砂石、泥地上有效作业,但是这类运输平台往往传动效率低,运动速度慢,无法实现高速机动要求。
技术实现要素:
4.为解决上述技术问题,本发明实施例期望提供一种前后轮和轮履独立作业或者协同作业以提高越障性能的轮履复合移动平台。
5.本发明的技术方案是这样实现的:
6.一种轮履复合移动平台,包括载运台、以及位于所述载运台之下的前轮驱动系统、后轮驱动系统和可摆角的履带轮驱动系统,所述履带轮驱动系统设于所述前轮驱动系统和所述后轮驱动系统之间,所述前轮驱动系统包括前轮悬架和前驱动桥,所述前轮悬架用于控制所述前驱动桥摆动,所述后轮驱动系统包括后轮悬架和后驱动桥,所述后轮悬架用于控制所述后驱动桥摆动,所述前轮悬架和所述后轮悬架相互独立。
7.优选的,所述前轮悬架包括固定于所述载运台下方的前轮架、两端分别转动连接于所述前轮架和所述前驱动桥上的前轮摆臂、以及两端分别连接于所述前轮架和所述前轮摆臂上的前轮伸缩杆,所述前驱动桥连接于所述前轮摆臂上,所述前轮伸缩杆做伸缩运动带动所述前轮摆臂摆动进而带动所述前驱动桥摆动。
8.优选的,所述前轮伸缩杆为液压缸、电动推杆或者气缸。
9.优选的,所述前轮架为弯曲设置的中空的方形钢,所述前轮摆臂为弧形的方形钢,所述前轮伸缩杆的一端转动连接在所述前轮架内,另一端转动连接于所述前轮摆臂。
10.优选的,所述后轮悬架包括固定于所述载运台下方的后轮架、两端分别转动连接于所述后轮架和所述后驱动桥上的后轮摆臂、以及两端分别连接于所述载运台和所述后轮摆臂上的后轮伸缩杆,所述后轮伸缩杆做伸缩运动带动所述后轮摆臂摆动进而带动所述后驱动桥摆动。
11.优选的,所述后轮伸缩杆为液压缸、电动推杆或者气缸。
12.优选的,所述履带轮驱动系统包括摆动梁和履带轮伸缩杆,所述摆动梁和所述履带轮伸缩杆的一端分别转动连接在所述载运台底部、另一端分别转动连接于所述履带轮上,所述履带轮伸缩杆伸缩时带动所述履带轮摆动。
13.优选的,所述履带轮伸缩杆为中心对称设置的两组,前后设置的两组所述履带轮伸缩杆变化不同的长度以控制所述履带轮倾斜角度。
14.优选的,还包括牵引转向装置,所述牵引转向装置包括牵引组件以及与所述牵引组件连接的转向机构,所述牵引组件连接于所述载运台下,所述转向机构驱动所述牵引组件运动。
15.优选的,所述转向机构包括转向架、以及固定在所述转向架上的转向伸缩杆,所述转向伸缩杆的两端分别通过球铰固定在所述载运台下方,所述转向架与所述牵引组件枢转连接。
16.本发明实施例提供的轮履复合移动平台通过独立的所述前轮悬架来控制所述前驱动桥摆动,以及通过独立的所述后轮悬架来控制所述后驱动桥摆动,同时配合有可摆动角度的履带轮驱动系统形成了前后轮的单独作业,或者前后轮协同轮履作业的模式,其结构灵活,所述前驱动桥、后驱动桥和履带轮驱动系统在摆动的过程中改变了前、后轮和履带的离地高度,从而实现了前后轮和履带高度可调整的目的,可越过高障碍物,活动模式多样化,使得轮履复合移动平台的通过性能好,越障能力强,可适应复杂地形。
附图说明
17.图1为本发明提供的轮履复合移动平台的结构示意图;
18.图2为图1所示的前轮驱动系统的结构示意图;
19.图3为图1所示的后轮驱动系统的结构示意图;
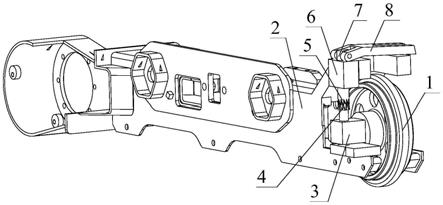
20.图4为图1所示的牵引转向装置的结构示意图;
21.图5为图1所示的轮履复合移动平台前后轮行驶状态图;
22.图6为图1所示的轮履复合移动平台轮履同时行驶状态图;
23.图7为图1所示的轮履复合移动平台履带轮行驶状态图;
24.图8为图1所示的轮履复合移动平台越障过程行驶状态图。
具体实施方式
25.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
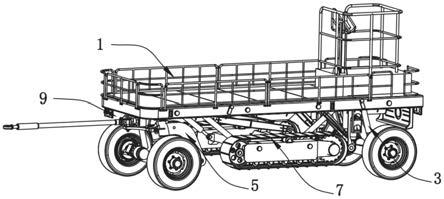
26.请参阅图1-图3。该轮履复合移动平台包括载运台1、以及位于所述载运台1之下的前轮驱动系统3、后轮驱动系统5和可摆动角度的履带轮驱动系统7,所述履带轮驱动系统7设于所述前轮驱动系统3和所述后轮驱动系统5之间,所述前轮驱动系统3包括前轮悬架31和前驱动桥33,所述前轮悬架31连接在所述载运台1下方用于控制所述前驱动桥33摆动,所述后轮驱动系统5包括后轮悬架51和后驱动桥53,所述后轮悬架51连接在所述载运台1下方用于控制所述后驱动桥53摆动,所述前轮悬架31和所述后轮悬架51相互独立。通过独立的所述前轮悬架31来控制所述前驱动桥33摆动,以及通过独立的所述后轮悬架51来控制所述后驱动桥53摆动,同时配合有可摆动角度的履带轮驱动系统7形成了前后轮的单独作业,或
者前后轮协同轮履作业的模式,其结构灵活,所述前驱动桥33、后驱动桥53和履带轮驱动系统7在摆动的过程中改变了前、后轮和履带轮的离地高度,从而实现了前后轮和履带轮高度可调整的目的,可越过高障碍物,活动模式多样化,使得轮履复合移动平台的通过性能好,越障能力强,可适应复杂地形。
27.请参阅图2,所述前轮悬架31包括固定于所述载运台1下方的前轮架35、两端分别转动连接于所述前轮架35和所述前驱动桥33上的前轮摆臂37、以及两端分别连接于所述前轮架35和所述前轮摆臂37上的前轮伸缩杆39,所述前驱动桥33连接于所述前轮摆臂37上,所述前轮伸缩杆39做伸缩运动带动所述前轮摆臂37摆动进而带动所述前驱动桥摆动,进而实现前驱动桥33的升降,即前驱动桥高度的抬高或者降低。所述前轮伸缩杆39做伸缩运动时,所述前轮摆臂37绕铰接点转动,带动所述前驱动桥33绕与前轮摆臂37的连接处摆动。实现了前驱动桥33的摆动,前驱动桥33在摆动的过程中改变了前轮的离地高度,从而实现了高度可调整的目的,可越过高障碍物,结构灵活,从而越障能力好,能适应复杂地形。
28.具体的,在本实施例中,所述前轮伸缩杆39为液压缸、电动推杆或者气缸。优选的,在本实施例中,所述前轮伸缩杆39为液压缸。液压缸在控制器的控制下伸缩,从而形成液压悬架控制的摆动使车轮,运行稳定,实现独立的前轮作业,与后轮运动不产生联动。
29.所述前轮架35为弯曲设置的中空的方形钢,所述前轮摆臂37为弧形的方形钢,所述前轮伸缩杆39的一端转动连接在所述前轮架35内,另一端转动连接于所述前轮摆臂37,使得结构更加紧凑。所述前轮架35与所述前轮摆臂37之间的连接形成夹角,所述前轮摆臂37与所述前轮架35的夹角大小就是前轮摆臂37的摆动幅度,摆动收拢时,所述前轮摆臂能部分收紧在所述前轮架内,结构紧凑便于各结构联合运动。所述前轮摆臂通过独立的的液压缸驱动,可以独立运行,也可以组合运行。
30.所述前驱动桥33为左右两组,两组前驱动桥33各自分离,所述前驱动桥为独立设置,可以独立运行,也可以组合其他运行。每一组前驱动桥33包括液压马达、离合器和前轮。液压马达通过离合器带动前轮转动。
31.请参阅图3,所述后轮悬架51包括固定于所述载运台1下方的后轮架55、两端分别转动连接于所述后轮架55和所述后驱动桥53上的后轮摆臂57、以及两端分别连接于所述载运台1和所述后轮摆臂57上的后轮伸缩杆59,所述后轮伸缩杆59做伸缩运动带动所述后轮摆臂摆动进而带动后驱动桥53摆动。所述后轮伸缩杆59做伸缩运动时,所述后轮摆臂57绕铰接点转动,带动所述后驱动桥53绕与后轮摆臂57的连接处摆动。实现了后驱动桥53的摆动,摆动的过程中改变了后轮的离地高度,从而实现了高度可调整的目的,后轮升降的过程中可越过高障碍物,结构灵活,从而越障能力好,能适应复杂地形。需要说明的是,所述后轮摆臂通过独立的液压缸控制动作,可以独立运行,也可以与前轮摆臂组合运行,运行模式更加灵活多变。
32.具体的,在本实施例中,所述后轮伸缩杆59为液压缸、电动推杆或者气缸。优选的,在本实施例中,所述后轮伸缩杆59为液压缸。液压缸在控制器的控制下伸缩,从而形成液压悬架控制的摆动式车轮,运行稳定,实现独立的前轮作业,与前轮不产生联动作业。
33.所述后驱动桥53为左右两组,两组后驱动桥53各自分离,每一组后驱动桥53包括液压马达、离合器和后轮。液压马达通过离合器带动后轮转动。
34.请结合参阅图1和图5,所述履带轮驱动系统7包括摆动梁71和履带轮伸缩杆73,所
述摆动梁71和所述履带轮伸缩杆73的一端分别转动连接在所述载运台1底部、另一端分别转动连接于所述履带轮上,所述履带轮伸缩杆73伸缩时带动所述履带轮摆动。所述摆动梁71转动连接于载运台1和履带轮上,起灵活连接所述载运台1和所述履带轮的作用,所述伸缩杆伸长或者缩短时,所述履带轮变化不同的摆动角度,从而可跨域高障碍物,越障性能好,适应复杂地形。
35.所述履带轮伸缩杆73为中心对称设置的两组,前后设置的两组所述履带轮伸缩杆73变化不同的长度以控制所述履带轮不同的倾斜角度,从而跨越不同的类型的障碍物。所述履带轮伸缩杆为液压缸,一组所述履带轮伸缩杆为两个液压缸。前面的所述履带轮伸缩杆73伸长,后面的所述履带轮伸缩杆73缩短时,轮履往后倾斜,相反的,前面的所述履带轮伸缩杆73缩短,后面的所述履带轮伸缩杆73伸长时,履带轮往前倾斜。通过不同长度的变化来控制倾斜的角度,使得履带轮可跨域高障碍物,越障性能好,适应复杂地形。
36.请参阅图5,在无障碍正常行驶的状态下,轮胎行驶状态下,前轮、后轮同时降低着地,履带轮离开地面,实现轮胎行驶功能。
37.请参阅图6,履带轮行驶状态下,前、后轮升高离地,履带轮接触地面,实现履带轮行驶功能。
38.请参阅图7和8,轮-履同时传动行驶状态下,升降至适当高度,轮胎和履带轮同时接触地面,实现轮履同时行驶功能。轮-履配合越障行驶状态下,用于跨越垂直障碍,运行过程为:后轮驱动系统5保持原状,所述履带轮驱动系统7的履带轮伸缩杆73伸长,履带轮着地,前轮悬架31回缩,前驱动桥33摆动抬高,移动平台前端整体抬高,移动平台的前端移动至障碍物上,移动平台前进一段距离后,履带轮伸缩杆73回缩长度,履带轮高度提高,履带轮移动至障碍物上,后轮悬架51伸长,继续前进一段距离后,轮履全部行驶在障碍上,后轮悬架51回缩,后轮离地,继续前进,移动平台全部行驶在障碍物上,实现越障。在越障的过程中,前轮、后轮和履带轮单独控制,实现独立的作业,根据不同的工况需求实现越障。
39.另一实施例中,请参阅图4,所述轮履复合移动平台还包括牵引转向装置9,所述牵引装置设置在所述载运台1的前端,所述牵引转向装置9包括牵引组件91以及与所述牵引组件91连接的转向机构93,所述牵引组件91连接于所述载运台1下,所述转向机构93驱动所述牵引组件91运动。所述转向机构93在控制器的控制下变化伸缩长度,从而推动所述牵引组件91转动方向来实现整个轮履复合移动平台的转向,结构灵活。
40.所述牵引组件91包括牵引杆95和安装支架96,所述安装支架96固定在所述载运台1下方,所述牵引杆95的一端枢接在所述安装支架96上,另一端连接在车头上,车头通过牵引杆95来拉动所述轮履复合移动平台,从而实现牵引行驶,拆卸牵引杆95后,前面的车头可自行行驶。
41.所述转向机构93包括转向架97、以及固定在所述转向架97上的转向伸缩杆99,所述转向伸缩杆99的两端分别通过球铰连接固定在所述载运台1下方,所述转向架97与所述牵引组件91的所述牵引杆95枢转连接。所述转向伸缩杆99为液压缸,所述转向架97的转向角度通过杠杆反应到所述转向伸缩杆99,牵引行驶不连接动力,根据牵引杆95角度变化推动车轮转向。需要说明的是,在自动驾驶时,连接动力,由控制器控制转向角度。而且,通过设置牵引转向装置,可设置捆绑加固点,适用空运空投和直升机外挂运输。
42.本发明实施例提供的轮履复合移动平台通过独立的所述前轮悬架来控制所述前
驱动桥摆动,以及通过独立的所述后轮悬架来控制所述后驱动桥摆动,同时配合有可摆动角度的履带轮驱动系统形成了前后轮的分别单独作业,或者前后轮协同轮履作业的模式,其结构灵活,所述前驱动桥、后驱动桥和履带轮驱动系统在摆动的过程中改变了前、后轮和履带的离地高度,从而实现了前后轮和履带高度可调整的目的,可越过高障碍物,活动模式多样化,使得轮履复合移动平台的通过性能好,越障能力强,可适应复杂地形。
43.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。