1.本发明涉及移动体、输送装置以及部件安装系统。更详细而言,本发明涉及在移动面之上行驶的移动体、输送装置以及部件安装系统。
背景技术:
2.文献1(日本公开专利公报2020
‑
15403号)公开了一边支承物流台车等货物一边移动的输送车。在输送车的基体设置有以规定间隔排列的两个驱动轮、以及以比驱动轮窄的间隔与驱动轮所排列的方向平行地排列的两个从动轮。
技术实现要素:
3.发明要解决的课题
4.文献1的输送车(移动体)利用两个驱动轮和两个从动轮在移动面接地。若从动轮攀至移动面的起伏,则驱动轮有可能离开移动面。若驱动轮与接地面的接触状态被破坏,则由驱动轮产生的驱动力或制动力有可能减少,且输送车的运动稳定性有可能降低。
5.本发明的目的在于提供能够抑制运动稳定性的降低的移动体、输送装置以及部件安装系统。
6.用于解决课题的方案
7.本发明的一个方案的移动体具备主体、至少一个驱动轮、多个辅助轮、支承体以及引导支承部。所述至少一个驱动轮设置于所述主体。所述多个辅助轮设置于所述支承体。所述引导支承部以能够沿着规定的移动方向移动的状态将所述支承体相对于所述主体支承。所述支承体以能够沿着所述移动方向移动的状态安装于所述主体。
8.本发明的一个方案的输送装置使用了所述移动体,所述主体具有保持部,所述保持部保持被输送物。
9.本发明的一个方案的部件安装系统包括将部件安装于基板的至少一个部件安装机。所述部件安装机具有:馈送器台车,其供给所述部件;以及安装主体,其包括将所述部件安装于所述基板的安装头。所述馈送器台车是由所述输送装置输送到所述安装主体的所述被输送物。
10.发明效果
11.根据本发明,能够抑制运动稳定性的降低。
附图说明
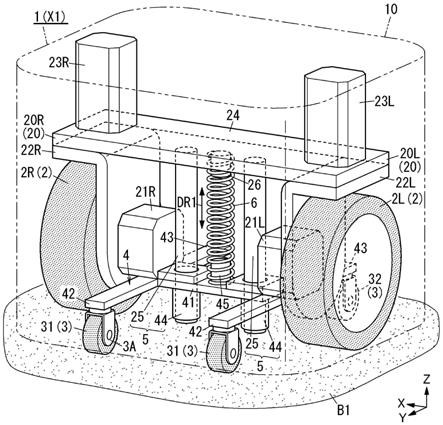
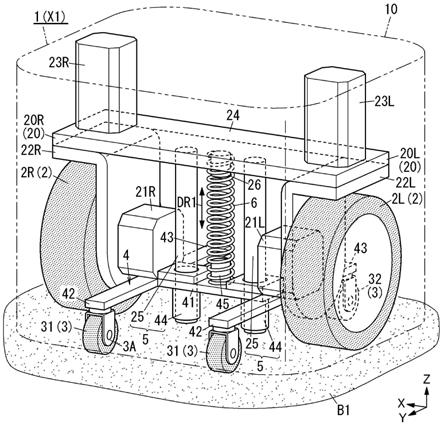
12.图1是使用了本发明的一个实施方式的移动体的输送装置的示意性的立体图。
13.图2是该输送装置正在输送被输送物的状态的示意性的侧视图。
14.图3是该输送装置正在输送被输送物的状态的示意性的俯视图。
15.图4是说明该输送装置的行驶状态的示意性的侧视图。
16.图5是包括该输送装置在内的整体系统的概要性的框图。
17.图6是使用了本发明的一个实施方式的变形例1的移动体的输送装置的示意性的侧视图。
18.图7是使用了本发明的一个实施方式的变形例2的移动体的输送装置的示意性的侧视图。
19.图8是使用了本发明的一个实施方式的变形例3的移动体的输送装置的示意性的立体图。
20.图9是该输送装置的行驶状态的说明图。
21.图10是示意性地示出该输送装置和部件安装系统的俯视图。
22.附图标记说明:
23.1 移动体
24.2 驱动轮
25.3 辅助轮
26.4 支承体
27.5 引导支承部
28.6 弹性体
29.7 减振器
30.10 主体
31.18 保持部
32.80 部件安装机
33.81 馈送器台车
34.82 安装主体
35.181 连结部
36.a1 被输送物
37.b1 移动面
38.dr1 移动方向
39.vl1 法线
40.w1 部件安装系统
41.x1 输送装置。
具体实施方式
42.(实施方式)
43.(1)概要
44.在以下的实施方式中说明的各图是示意性的图,且各图中的各构成要素的大小及厚度各自的比不一定反映实际的尺寸比。
45.移动体1具备主体10、至少一个驱动轮2、多个辅助轮3、支承体4以及引导支承部5。至少一个驱动轮2设置于主体10。多个辅助轮3设置于支承体4。引导支承部5以能够沿着规定的移动方向dr1移动的状态下将支承体4相对于主体10支承。支承体4以能够沿着移动方向dr1移动的状态安装于主体10。
46.本实施方式的移动体1利用至少一个驱动轮2和多个辅助轮3与移动面b1接触并在
移动面b1之上行驶。在辅助轮3攀至移动面b1的起伏的情况下,通过设置有辅助轮3的支承体4相对于主体10沿着移动方向dr1移动,能够吸收移动面b1的起伏,而使驱动轮2与移动面b1接触。因此,即使在移动面b1存在起伏的情况下,也容易保持驱动轮2与移动面b1的接触状态,且由驱动轮2产生的驱动力或制动力难以减少,因此能够抑制移动体1的运动稳定性的降低。
47.以下,以本实施方式的移动体1是如图2及图3所示输送被输送物a1的输送装置x1的情况为例进行说明。被输送物a1具有车轮a11,且构成为能够与输送装置x1一起在移动面b1之上利用车轮a11行驶。
48.输送装置x1例如被引入工厂、物流中心(包括配送中心)、办公室、店铺、学校以及医院等设施。移动面b1是供输送装置x1在其上移动的面,在输送装置x1在设施内移动的情况下,设施的地板面等成为移动面b1,在输送装置x1在室外移动的情况下,地面等成为移动面b1。以下,以输送装置x1在设置有部件安装系统w1(参照图10)的工厂中使用的情况为例进行说明。对于部件安装系统w1,在“(2.3)部件安装系统”中进行说明。
49.(2)详细内容
50.以下,参照附图对使用了本实施方式的移动体1的输送装置x1、具备该输送装置x1的部件安装系统w1(参照图10)详细地进行说明。
51.(2.1)整体结构
52.本实施方式的输送装置x1例如构成为能够与上位系统100(参照图5)相互通信。本发明中的“能够通信”是指能够利用有线通信或无线通信的适当的通信方式直接地、或者经由网络nt1或中继器r1等间接地授受信息。在本实施方式中,上位系统100和输送装置x1能够相互双向通信,且能够进行从上位系统100向输送装置x1的信息发送、以及从输送装置x1向上位系统100的信息发送这两方。
53.上位系统100是用于对一台或多台输送装置x1统一进行控制的系统,且例如由服务器装置实现。上位系统100通过分别对多台输送装置x1发出指示,从而间接地控制多台输送装置x1。具体而言,当上位系统100对输送装置x1发出被输送物a1的输送指示时,输送装置x1接收输送指示而自主地进行使被输送物a1移动到目标位置的作业。
54.在本实施方式中,上位系统100以具有一个以上的处理器及存储器的计算机系统为主要结构。因此,通过由一个以上的处理器执行记录在存储器中的程序,从而实现上位系统100的功能。程序可以预先记录在存储器中,也可以通过因特网等电信线路来提供,也可以记录在存储卡等非暂时的记录介质中来提供。需要说明的是,在本实施方式中,上位系统100不是必须的结构而可以适当省略,输送装置x1也可以基于直接输入或者经由操作终端输入的输送指示而自主地进行被输送物a1的输送作业。
55.(2.2)移动体
56.接下来,对作为输送装置x1使用的移动体1进行说明。
57.移动体1如图2及图3所示为了输送被输送物a1而无人行驶。
58.如上所述,移动体1具备主体10、至少一个驱动轮2、多个辅助轮3、支承体4以及引导支承部5。需要说明的是,本实施方式的移动体1具备一对驱动轮2和两对辅助轮3。另外,如图5所示,本实施方式的移动体1还具备对驱动轮2进行驱动的驱动轮单元20、控制装置11、电源12、通信部13以及检测部14。
59.移动体1具有在移动体1的左右方向上排列的多个(在本实施方式中为一对)驱动轮2。本发明所说的“左右方向”是移动体1的长度方向,且是图1及图3中的x轴方向。上下方向是移动面b1的法线方向,且是图1中的z轴方向。移动体1的前后方向是与左右方向及上下方向分别正交的方向、即移动体1的短边方向,且是图1及图3中的y轴方向。
60.本实施方式的移动体1作为输送装置x1使用。在使用了移动体1的输送装置x1中,主体10具备对被输送物a1进行保持的保持部18(参照图2及图3)。在本实施方式中,保持部18包括通过与被输送物a1连结而对被输送物a1进行保持的连结部181。
61.在移动体1输送被输送物a1的情况下,在移动体1的前后方向上的一面设置有连结被输送物a1的连结部181。移动体1与使用连结部181而与该移动体1连结的被输送物a1一起移动。连结部181例如通过利用钩挂或嵌合等对在移动面b1之上行驶的被输送物a1的至少一部分进行把持,从而以能够装卸的方式连结于被输送物a1。连结部181例如以在上下方向上具有自由度的状态将主体10与被输送物a1之间以能够装卸的方式连结。在此,被输送物a1向连结部181的连结可以由移动体1或其他装置自动进行,也可以由人进行。另外,连结部181的形状以及移动体1(输送装置x1)所具备的连结部181的数量可以适当变更。需要说明的是,在本实施方式中,移动体1具备连结部181作为保持被输送物a1的保持部18,但保持部不限定于连结部181。移动体1例如也可以具有电磁体作为保持部,并通过利用电磁体所产生的磁力吸附被输送物a1,从而保持被输送物a1。
62.在此,在移动体1在前后方向上移动的情况下,将移动体1前进的方向(行进方向)称为前方,将其相反方向称为后方。在移动体1输送被输送物a1的情况下,存在移动体1成为前端而牵引被输送物a1的行驶方式、以及使被输送物a1为前端而由移动体1推着被输送物a1的行驶方式。通常,与从后侧推着被输送物a1的行驶方式相比,牵引被输送物a1的行驶方式的行驶状态稳定,因此移动体1通常牵引被输送物a1而移动。在移动体1牵引被输送物a1而移动的情况下,y轴方向的正向为前侧,x轴方向的正向为右侧。但是,这些方向是一例,并没有限定移动体1使用时的方向的意思。另外,附图中的表示各方向的箭头只不过是为了说明而标记的,并不具有实体。
63.移动体1的主体10如图1中由双点划线图示的那样形成为长方体状。在主体10的下部配置有多个驱动轮2和多个辅助轮3。在本实施方式中,相对于主体10,一对驱动轮2以在左右方向上排列的方式配置。在主体10以相对于一对驱动轮2分别在前侧及后侧沿左右方向排列的方式配置有一对辅助轮3。
64.在本实施方式中,一对驱动轮2包括位于主体10的左侧的左驱动轮2l和位于主体10的右侧的右驱动轮2r。在本实施方式中,在主体10设置有两个驱动轮2,移动体1利用两个驱动轮2和四个辅助轮3在移动面b1之上行驶。然而,当在移动体1仅设置两个驱动轮2和一个辅助轮3且仅利用两个驱动轮2和一个辅助轮3这三个轮在移动面b1接地的情况下,由于因加减速引起的重心位置的变化,而有可能无法保持三个轮全部在移动面b1接地的状态。因此,当以在移动体1设置两个驱动轮2和多个辅助轮3且利用至少三个轮在移动面b1接地的方式构成了移动体1的情况下,由于移动面b1的起伏,而有可能利用两个驱动轮2中的一方和两个辅助轮3在移动面b1接地。在该情况下,由于两个驱动轮2中的一方从移动面b1浮起,因此由驱动轮2产生的驱动力或制动力有可能降低。与此相对,在本实施方式中,设置有多个(图示例中为两对)辅助轮3的支承体4以能够相对于主体10沿着移动方向dr1移动的状
态设置于主体10。由此,在四个辅助轮3中的任一个攀至移动面b1的起伏的情况下,通过支承体4向上侧移动,从而攀至起伏的一个辅助轮3和两个驱动轮2成为与移动面b1相接的状态。因此,由于保持了两个驱动轮2与移动面b1接触的状态,因此能够抑制由两个驱动轮2产生的驱动力或制动力减少,且能够抑制移动体1的运动稳定性降低。需要说明的是,驱动轮2的数量不限定于两个,也可以是一个,也可以是三个以上。也就是,在主体10设置至少一个驱动轮2即可,且构成为利用至少一个驱动轮2在移动面b1之上移动。
65.在本实施方式中,左驱动轮2l及右驱动轮2r分别兼作转向轮。驱动左驱动轮2l的驱动机构与改变左驱动轮2l的朝向的转向机构一体化为左驱动轮单元20l。另外,驱动右驱动轮2r的驱动机构与改变右驱动轮2r的朝向的转向机构一体化为右驱动轮单元20r。也就是,上述的驱动轮单元20包括左驱动轮单元20l和右驱动轮单元20r。
66.左驱动轮单元20l控制左驱动轮2l的旋转和舵角。左驱动轮单元20l如图1及图5所示具备使左驱动轮2l在圆周方向上旋转的驱动马达21l、以及使左驱动轮2l的朝向(滚动方向)变化的转向马达23l。转向马达23l安装于平板状的固定板24的左端部,该平板状的固定板24相对于主体10以沿着主体10的下表面的方式设置。转向马达23l通过使固定有驱动马达21l的托架22l在与移动面b1平行的平面内旋转,从而使左驱动轮2l的朝向变化。也就是,左驱动轮单元20l及支承于左驱动轮单元20l的左驱动轮2l经由固定板24等而固定于主体10。在此,左驱动轮单元20l接受来自控制装置11的控制命令,从而转向马达23l使左驱动轮2l向由控制命令指示出的朝向变化,且驱动马达21l使左驱动轮2l以由控制命令指示出的旋转转矩或旋转速度旋转。
67.右驱动轮单元20r控制右驱动轮2r的旋转和舵角。右驱动轮单元20r如图1及图5所示具备使右驱动轮2r在圆周方向上旋转的驱动马达21r、以及使右驱动轮2r的朝向(滚动方向)变化的转向马达23r。转向马达23r安装于固定板24的右端部。转向马达23r通过使固定有驱动马达21r的托架22r在与移动面b1平行的平面内旋转,从而使右驱动轮2r的朝向变化。也就是,右驱动轮单元20r及支承于右驱动轮单元20r的右驱动轮2r经由固定板24等而固定于主体10。在此,右驱动轮单元20r接受来自控制装置11的控制命令,从而转向马达23r使右驱动轮2r向由控制命令指示出的朝向变化,且驱动马达21r使右驱动轮2r以由控制命令指示出的旋转转矩或旋转速度旋转。
68.在安装有右驱动轮单元20r及左驱动轮单元20l的固定板24的下表面设置有从左右方向的中央部向下突出的两根轴25。两根轴25分别形成为圆棒状,且在左右方向上排列设置。另外,在固定板24的下表面设置有从两根轴25之间的部位向下突出的突起26,在该突起26插入螺旋弹簧6的一个端部(上端部)。
69.移动体1的控制装置11控制右驱动轮单元20r而单独地驱动右驱动轮2r,并控制左驱动轮单元20l而单独地驱动左驱动轮2l。即,由于一对驱动轮2(右驱动轮2r及左驱动轮2l)分别能够单独地转向,因此通过单独地使一对驱动轮2转向,能够使移动体1向期望的方向移动。在本实施方式中,一对驱动轮2分别兼作转向轮,且与相对于驱动轮2另外设置转向轮的情况相比,能够减少移动体1所具备的车轮的数量。
70.在本实施方式中,两对辅助轮3设置于支承体4。两对辅助轮3是追随移动体1的移动方向而改变朝向的从动轮。在此,两对辅助轮3包括车轴3a(参照图1)的朝向可变的自由车轮。也就是,两对辅助轮3例如分别是将车轮支承为能够旋转的车轴3a能够在与移动面b1
平行的平面内沿360度的整个周向旋转的自由车轮(所谓的自由脚轮)。需要说明的是,用作辅助轮3的自由车轮不限定于车轴3a的朝向可变的自由车轮,也可以是作为车轮的球体能够向任意方向旋转的球脚轮。
71.设置有两对辅助轮3的支承体4以能够相对于主体10移动的状态安装于主体10。支承体4具备左右方向的尺寸比前后方向的尺寸长的矩形板状的中央片41、从中央片41的左右方向的两端部分别向前方突出的一对前腿片42、以及从中央片41的左右方向的两端部分别向后方突出的一对后腿片43。通过中央片41、一对前腿片42以及一对后腿片43,支承体4的俯视形状形成为h状。并且,在一对前腿片42的前侧部分逐个安装一对辅助轮3,在一对后腿片43的后侧部分逐个设置一对辅助轮3。在此,在两对辅助轮3中,有时也将在一对前腿片42的前侧部分设置的一对辅助轮3称为前辅助轮31,并将在一对后腿片43的后侧部分设置的一对辅助轮3称为后辅助轮32。在前后方向上,在一对前辅助轮31与一对后辅助轮32之间配置有一对驱动轮2。换言之,在支承体4且主体10的行进方向(前后方向)上的驱动轮2的两侧分别配置有一个以上(在图1及图2的例子中为各两个)的辅助轮3。
72.在固定有两对辅助轮3的支承体4的中央片41,在左右方向上排列设置有分别供两根轴25插入的两个筒状部44。另外,在中央片41的上表面设置有从两个筒状部44之间的部位向上突出的突起45,在该突起45插入螺旋弹簧6的另一个端部(下端部)。这样,在支承体4的两个筒状部44逐个插入设置于固定板24的两个轴25,在支承体4的中央片41与固定板24之间安装螺旋弹簧6。
73.由此,支承体4相对于主体10以能够沿着轴25的长度方向移动的状态安装。也就是,由一对轴25、以及分别供一对轴25插入的一对筒状部44构成将支承体4支承(保持)在能够沿着规定的移动方向dr1移动的状态的引导支承部5。支承体4以能够沿着移动方向dr1移动的状态下安装于主体10。在此,支承体4能够移动的移动方向dr1沿着供移动体1移动的移动面b1的法线vl1(参照图2)。换言之,支承体4能够移动的移动方向dr1与移动面b1的法线vl1平行,支承体4能够在与移动面b1正交的方向(上下方向)上移动。需要说明的是,移动方向dr1与移动面b1的法线vl1平行不限定于平行于移动方向dr1的直线与移动面b1的法线vl1完全平行的状态,只要平行于移动方向dr1的直线与移动面b1的法线vl1所成的角度收敛于规定的允许误差范围(几度左右)即可。另外,与移动面b1正交的方向不限定于与移动面b1直角交叉的方向,只要在几度左右的误差范围内,也可以相对于直角偏离。
74.如上所述,在本实施方式中,设置有辅助轮3的支承体4构成为能够相对于主体10沿着规定的移动方向dr1移动。因此,在辅助轮3攀至移动面b1的起伏的情况下,通过支承体4相对于主体10向上侧移动,能够容易保持驱动轮2与移动面b1的接触状态。由此,由驱动轮2产生的驱动力或制动力难以减少,且能够抑制移动体1的运动稳定性的降低。
75.需要说明的是,在本实施方式中,在支承体4设置有四个辅助轮3,但在支承体4设置多个辅助轮3即可,既可以在支承体4设置两个或三个辅助轮3,也可以在支承体4设置五个以上的辅助轮3。
76.另外,在本实施方式中,在支承体4且主体10的行进方向上的驱动轮2的两侧分别配置有一个以上(在图1及图2中为各两个)的辅助轮3。因此,在移动体1加速时主体10欲向后侧倾倒的情况下,能够由后侧的辅助轮3支承主体10,另外,在移动体1减速时主体10欲向前侧倾倒的情况下,能够由前侧的辅助轮3支承主体10,因此能够抑制主体10的姿态的变
化。
77.另外,在支承体4与固定板24之间,螺旋弹簧6以压缩的状态安装。因此,利用螺旋弹簧6的弹力将安装于支承体4的各一对前辅助轮31和后辅助轮32按压于移动面b1。也就是,本实施方式的移动体1还具备产生将支承体4向下方(移动面b1)按压的弹力的弹性体。在此,“下方”优选为重力方向,且在移动面b1水平的情况下优选为移动面b1的法线方向,但也可以相对于重力方向存在规定的允许角度以内的偏差。在本实施方式中,该弹性体由螺旋弹簧6构成。
78.在本实施方式中,弹性体例如是螺旋弹簧6,螺旋弹簧6通过相对于主体10将支承体4向下方按压,能够将设置于支承体4的辅助轮3向移动面b1按压。因此,在移动体1进行了加速或减速的情况下,主体10由于惯性而欲向后侧或前侧倾倒,但在螺旋弹簧6的弹力f1的作用下主体10被向上按压,因此具有主体10难以向后侧或前侧倾倒这样的优点。例如,若在移动体1加速时主体10欲向后侧倾倒,则与在主体10产生的惯性力g1相应的载荷施加于后辅助轮32。此时,若产生欲使主体10向后侧倾倒的力,则螺旋弹簧6挠曲,在螺旋弹簧6的弹力的作用下支承体4被向下方按压,因此后辅助轮32从移动面b1受到与螺旋弹簧6的弹力f1相等的反作用力f2。在此,若将主体10的重心p1距移动面b1的高度设为h1,则由于惯性力g1而欲使主体10向后侧倾倒的力矩为(g1
×
h1)。因此,在将重心p1与后辅助轮32之间的距离设为d1时,若g1
×
h1=f2
×
d1的关系成立,则由于惯性力g1而欲使主体10向后侧倾倒的力矩被与螺旋弹簧6的弹力相应的反作用力抵消,因此主体10的姿态变化被抑制。因此,只要以g1
×
h1=f2
×
d1的关系成立的方式设定螺旋弹簧6的弹簧常数等即可,且能够利用螺旋弹簧6的弹力抑制由移动体1的加减速引起的主体10的姿态变化。需要说明的是,相对于主体10将支承体4向下方按压的弹性体不限定于螺旋弹簧6,也可以是板簧等。
79.如上所述,在多个辅助轮3和驱动轮2全部与供移动体1移动的移动面b1相接的状态下,在弹性体(螺旋弹簧6)产生的弹力的作用下多个辅助轮3被按压于移动面b1。若移动体1加速或减速,则在主体10的惯性的作用下主体10欲向后方或前方倾倒,但利用螺旋弹簧6的弹力将多个辅助轮3按压于移动面b1,因此能够抑制主体10向后方或前方倾倒。因此,能够在移动体1加减速时抑制主体10的姿态发生变化,且能够抑制由于移动体1的姿态发生变化而对连结于移动体1的被输送物a1施加的振动的振幅。因此,能够抑制对被输送物a1或者搭载于被输送物a1的物品施加的振动的影响。
80.另外,在本实施方式中,将设置有一对前辅助轮31及一对后辅助轮32的支承体4相对于主体10向下方按压的一个弹簧系统由一个弹性体(螺旋弹簧6)构成。在此,在分别设置有将前辅助轮31向移动面b1按压的弹性体(弹簧系统)、以及将后辅助轮32向移动面b1按压的弹性体(弹簧系统)的情况下,两个弹性体(弹簧系统)的弹力施加于移动面b1。换言之,由于利用两个弹簧系统将主体10从移动面b1抬起,因此设置于主体10的驱动轮2抓持移动面b1的力有可能减弱。与此相对,在本实施方式中,由于用于将前辅助轮31向移动面b1按压的弹性体、以及用于将后辅助轮32向移动面b1按压的弹性体由一个弹性体(弹簧系统)构成,因此欲将主体10从移动面b1抬起的力仅由一个弹性体(弹簧系统)产生。因此,能够抑制驱动轮2抓持移动面b1的力降低,且能够抑制驱动轮2的驱动力或制动力降低,因此能够抑制运动稳定性的降低。需要说明的是,在本实施方式中,相对于主体10将设置有多个辅助轮3的支承体4向下方按压的一个弹簧系统由一个螺旋弹簧6构成,但该一个弹簧系统也可以由
串联或并联设置的多个弹性体构成。
81.另外,在本实施方式中,支承体4及弹性体构成为,弹性体(螺旋弹簧6)的弹簧常数比支承体4中设置有辅助轮3的部位(前腿片42或后腿片43)的弹簧常数小。支承体4中设置有辅助轮3的部位是指从中央片41分别向前侧及后侧突出的前腿片42及后腿片43,前腿片42及后腿片43的弹簧常数比螺旋弹簧6的弹簧常数大。由于前腿片42及后腿片43与螺旋弹簧6相比难以挠曲,因此在如图4所示那样辅助轮3攀至移动面b1的起伏b2的情况下,通过压缩螺旋弹簧6,能够吸收移动面b1的起伏b2。
82.接下来,对检测部14进行说明。检测部14检测主体10的行动以及主体10的周边状况等。本发明中所说的“行动”是指动作及情形等。也就是,主体10的行动包括表示主体10行驶中/停止中的主体10的动作状态、主体10的移动距离及行驶时间、主体10的速度(及速度变化)、作用于主体10的加速度、以及主体10的姿态等。
83.检测部14例如包括用于对在主体10的周围存在的物体进行检测的lidar(light detection and ranging)141、用于对设置于移动面b1的引导线进行检测的磁传感器142等传感器。
84.lidar141检测在主体10的周边有无物体,并在存在物体的情况下检测其位置,并将检测结果向控制装置11输出。控制装置11能够基于由lidar141检测到的物体的信息,而避免与物体的碰撞。
85.在此,优选为,将用于对在主体10的周围存在的物体进行检测的检测部14(在本实施方式中,例如为lidar141)支承于主体10。也就是,优选为,lidar141固定设置于主体10。即使在移动面b1存在起伏的情况下,通过安装有辅助轮3的支承体4相对于主体10沿移动方向dr1移动,也能够抑制主体10的姿态变化,因此能够抑制设置于主体10的lidar141的姿态相对于移动面b1发生变化。因此,能够降低lidar141将移动面b1误检测为在主体10的周围存在的物体的可能性。需要说明的是,用于对在主体10的周围存在的物体进行检测的检测部14不限定于lidar141。作为这种传感器,也可以是利用声波、光以及电波中的至少一种来对物体进行检测的传感器。
86.设置于移动面b1的引导线例如由包含永磁铁材料等硬磁性材料的橡胶等形成,且在移动面b1的表面沿着移动体1的行驶路径形成为线状。
87.磁传感器142利用磁来检测设置于移动面b1的引导线。控制装置11基于磁传感器142的检测结果,控制右驱动轮单元20r及左驱动轮单元20l,使移动体1移动以使移动体1通过引导线之上。
88.如上所述,在本实施方式中,在主体10的前部,两个前辅助轮31配置于左右两侧,在主体10的后部,两个后辅助轮32配置于左右两侧,在主体10的中央部,两个驱动轮2配置于左右两侧。也就是,在主体10的前部及后部中的左右方向的中央位置未配置车轮(前辅助轮31及后辅助轮32),因此能够在各中央位置各配置一个磁传感器142。因此,在基于磁传感器142的检测结果而使移动体1前进或后退,以使主体10的左右方向上的中央位置通过引导线之上的情况下,能够使驱动轮2及辅助轮3不通过引导线之上,因此能够抑制引导线的损耗。
89.需要说明的是,在移动面b1中,在移动体1的整个行驶路径设置引导线不是必须的,也可以在行驶路径的主要部位设置由磁性材料形成的引导标记,从而移动体1能够一边
追踪引导标记一边移动。另外,设置于移动面b1的引导线或引导标记不限定于利用磁来引导移动体1,也可以将由设置于移动体1的图像传感器进行检测的引导线或引导标记(例如二维条形码等)设置于移动面b1。另外,引导线或引导标记也可以由设置于移动体1的接触式的传感器进行检测。
90.另外,检测部14也可以基于由lidar141检测出的周边的物体的位置信息、以及规定区域的电子地图信息,来检测输送装置x1在规定区域内的存在位置,并将存在位置的检测结果向控制装置11输出。另外,检测部14也可以包括对从多个发送器以电波发送的信标信号进行接收的接收机,并基于从多个发送器发送的信标信号来检测当前位置,并将当前位置的检测结果向控制装置11输出。在此,多个发送器配置于供输送装置x1移动的规定区域内的多个部位。检测部14基于多个发送器的位置、以及接收机中的信标信号的接收电波强度,来测定移动体1的当前位置。另外,检测部14也可以使用gps(global positioning system)等全球定位系统来检测移动体1的当前位置。
91.控制装置11例如包括具有一个以上的处理器及存储器的微型计算机。换言之,控制装置11由具有一个以上的处理器及存储器的计算机系统来实现。控制装置11例如基于来自上位系统100的输送指示、以及检测部14的检测结果,而向各驱动轮单元20输出控制命令,并控制各驱动轮2的朝向及旋转,由此使移动体1向期望的方向以期望的速度移动。
92.电源12例如是二次电池。电源12直接或间接地向左驱动轮单元20l及右驱动轮单元20r、控制装置11、通信部13、以及检测部14等供给电力。需要说明的是,输送装置x1也可以被从外部供给电力,在该情况下,输送装置x1也可以不具备电源12。
93.通信部13构成为能够与上位系统100通信。在本实施方式中,通信部13利用以电波为介质的无线通信与在供输送装置x1移动的规定区域内设置的多个中继器r1中的任一个进行通信。因此,通信部13与上位系统100至少经由网络nt1及中继器r1而间接地进行通信。
94.各中继器r1是对通信部13与上位系统100之间的通信进行中继的设备(访问接入点)。中继器r1经由网络nt1而与上位系统100通信。在本实施方式中,作为一例,对于中继器r1与通信部13之间的通信,采用以wi
‑
fi(注册商标)、bluetooth(注册商标)、zigbee(注册商标)、或者不需要许可的小功率无线(特定小功率无线)等规格为依据的无线通信。另外,网络nt1不限于因特网,例如也可以应用供输送装置x1移动的规定区域内或者该规定区域的运营公司内的当地的通信网络。
95.(2.3)部件安装系统
96.本实施方式的输送装置x1如图10所示用于包括将部件安装于基板的至少一个部件安装机80的部件安装系统w1。
97.部件安装机80具有:馈送器台车81(参照图10),其供给部件;以及安装主体82,其包括将部件安装于基板的安装头。
98.馈送器台车81用于对设置在工厂内的部件安装机80的安装主体82供给部件。这里所说的“部件安装机”例如是在基板等对象物安装部件的机械。安装主体82包括将部件安装于基板的安装头。在本实施方式中,输送装置x1将作为被输送物a1的馈送器台车81输送到部件安装机80的安装主体82的设置场所。由此,能够构建部件安装系统w1。换言之,部件安装系统w1是包括将部件安装于基板的至少一个部件安装机80的系统。并且,馈送器台车81由输送装置x1输送到安装主体82。在本实施方式中,输送装置x1例如接受来自上位系统100
的指示,而使在规定区域内的某个场所放置的馈送器台车81移动到与安装主体82连接的位置。当输送装置x1使馈送器台车81向在安装主体82的侧面设置的凹部821内移动时,馈送器台车81的第二连接器与设置于安装主体82的第一连接器连接,由此安装主体82与馈送器台车81成为相互连接了的状态。并且,在安装主体82与馈送器台车81相互连接了的状态下,能够从馈送器台车81对安装主体82供给部件。
99.在此,优选为,输送装置x1能够连结于馈送器台车81中的与将部件向安装主体82排出的部位相反的一侧的部位。在该情况下,在将馈送器台车81输送到了部件安装机80的安装主体82的设置场所时,馈送器台车81中的排出部件的部位朝向安装主体82。因此,在将馈送器台车81输送到了部件安装机80的安装主体82的设置场所时,可以不进行改变馈送器台车81的朝向以使上述的排出的部位朝向安装主体82的作业。
100.(3)动作
101.以下,参照附图对使用了本实施方式的移动体1的输送装置x1的动作的一例进行说明。
102.本实施方式的输送装置x1通过与利用连结部181连结的被输送物a1一起移动,从而进行输送被输送物a1的作业。在此,连结部181以在上下方向上具有自由度的状态连结被输送物a1。
103.对于本实施方式的输送装置x1,如图4所示,在辅助轮3(前辅助轮31及后辅助轮32)攀至移动面b1的起伏b2的情况下,主体10由于其自重而沉降,由此能够使驱动轮2与移动面b1接触。由此,能够保持驱动轮2和辅助轮3与移动面b1接触的状态,并抑制驱动轮2的驱动力或制动力减少,因此能够抑制移动体1的运动稳定性降低。
104.(4)变形例
105.以下,列举上述实施方式的变形例。以下说明的变形例能够适当组合来应用。
106.本发明中的移动体1(输送装置x1)包括计算机系统。计算机系统以作为硬件的处理器及存储器为主要结构。通过由处理器执行在计算机系统的存储器中记录的程序,从而实现作为本发明中的移动体1(输送装置x1)的功能。程序可以预先记录在计算机系统的存储器中,也可以通过电信线路来提供,也可以记录在能够由计算机系统读取的存储卡、光盘、硬盘驱动器等非暂时的记录介质中来提供。计算机系统的处理器由包括半导体集成电路(ic)或大规模集成电路(lsi)的一个或多个电子电路构成。这里所说的ic或lsi等集成电路根据集成的程度而称呼方式不同,且包括被称为系统lsi、vlsi(very large scale integration)或ulsi(ultra large scale integration)的集成电路。而且,对于在lsi的制造后编程的fpga(field
‑
programmable gate array)、或者能够进行lsi内部的接合关系的重构或lsi内部的电路区划的重构的逻辑器件,也能够采用为处理器。多个电子电路既可以集中于一个芯片,也可以分散于多个芯片来设置。多个芯片既可以集中于一个装置,也可以分散于多个装置来设置。这里所说的计算机系统包括具有一个以上的处理器及一个以上的存储器的微型控制器。因此,对于微型控制器,也由包括半导体集成电路或大规模集成电路的一个或多个电子电路构成。
107.(4.1)变形例1
108.如图6所示,变形例1的移动体1与上述实施方式的不同点在于,在移动体1的前后方向上偏离重心p1的位置,支承体4相对于主体10安装。需要说明的是,在变形例1的移动体
1中,对与上述实施方式的移动体1共通的构成要素标注相同的附图标记,并省略它们的说明。
109.在上述实施方式的移动体1中,如图2所示,在移动体1的前后方向上且重心p1附近,相对于主体10安装有支承体4。因此,能够将由螺旋弹簧6的弹力产生的载荷均等地施加于前辅助轮31和后辅助轮32。
110.与此相对,在本实施方式中,如图6所示,在移动体1的前后方向上且偏离重心p1的位置,支承体4相对于主体10安装。由此,能够与从支承体4经由螺旋弹簧6而支承于主体10的位置起、到前辅助轮31为止的距离l1和到后辅助轮32为止的距离l2相应地,将由螺旋弹簧6产生的弹力分配给前辅助轮31和后辅助轮32。
111.需要说明的是,支承体4相对于主体10安装的位置可以与移动体1的形状及重量、移动体1的移动方式等相应地适当变更。
112.(4.2)变形例2
113.如图7所示,变形例2的移动体1与上述实施方式的不同点在于,还具备抑制支承体4相对于主体10的移动的减振器7。需要说明的是,由于除了减振器7以外与上述实施方式共通,因此对与上述实施方式的移动体1共通的构成要素标注相同的附图标记,并省略它们的说明。
114.减振器7例如是在活塞的内部填充了油的液压减振器,且安装于主体10与支承体4之间。具体而言,减振器7安装于主体10的固定板24与支承体4之间。当支承体4相对于主体10沿着移动方向dr1移动时,减振器7通过对支承体4施加与支承体4的移动相应的衰减力,能够使支承体4的移动历时衰减。因此,能够抑制对移动体1所输送的被输送物a1或者搭载于被输送物a1的物品施加的振动的影响。
115.需要说明的是,减振器7不限定于液压减振器,也可以由粘性减振器或粘弹性减振器等构成。
116.(4.3)变形例3
117.如图8及图9所示,变形例3的移动体1与上述实施方式的不同点在于,一对前辅助轮31经由连杆机构70而安装于支承体4a,且一对后辅助轮32经由连杆机构70而安装于支承体4a。需要说明的是,由于除了连杆机构70及支承体4a以外与上述实施方式共通,因此对与上述实施方式的移动体1共通的构成要素标注相同的附图标记,并省略它们的说明。
118.支承体4a形成为前后方向的尺寸比左右方向的尺寸长的平板状。在支承体4a的前端部分及后端部分分别设置有向上突出的支承片47。
119.连杆机构70具有左右方向的尺寸比前后方向的尺寸长的板状的连杆板71。连杆板71的下表面的左右两端部向支承体4a的外侧伸出,在连杆板71的下表面的左右两端部分别安装有辅助轮3(前辅助轮31或后辅助轮32)。在连杆板71的下表面的左右方向上的中央部设置有支承片72。并且,通过使旋转轴73穿过支承片72的孔和支承片47的孔,从而连杆板71在能够以旋转轴73为中心旋转的状态下安装于支承体4a。
120.由此,安装于连杆板71的一对前辅助轮31在能够以旋转轴73为中心旋转的状态下设置于支承体4a。另外,安装于连杆板71的一对后辅助轮32在能够以旋转轴73为中心旋转的状态下设置于支承体4a。例如,如图8及图9所示,在一对前辅助轮31中的仅右侧的前辅助轮31攀至移动面b1的起伏b2的情况下,通过连杆板71以旋转轴73为中心旋转,能够使支承
于连杆板71的两个前辅助轮31双方都与移动面b1接触。因此,能够保持辅助轮3(前辅助轮31及后辅助轮32)和驱动轮2在移动面b1接地的状态,且能够抑制驱动轮2的驱动力或制动力减少,因此能够抑制移动体1的运动稳定性降低。
121.(4.4)其他变形例
122.在上述实施方式中,多个辅助轮3固定于支承体4,但也可以在多个辅助轮3与支承体4之间分别设置弹性构件。也就是,多个辅助轮3也可以分别经由弹性构件(螺旋弹簧或板簧等)而安装于支承体4,从而能够由弹性构件吸收分别施加于多个辅助轮3的振动。
123.(总结)
124.如以上所说明的那样,第一方案的移动体1具备主体10、至少一个驱动轮2、多个辅助轮3、支承体4以及引导支承部5。至少一个驱动轮2设置于主体10。多个辅助轮3设置于支承体4。引导支承部5以能够沿着规定的移动方向dr1移动的状态将支承体4相对于主体10支承。支承体4以能够沿着移动方向dr1移动的状态安装于主体10。
125.根据该方案,能够抑制运动稳定性的降低。
126.在第二方案的移动体1中,在第一方案的基础上,还具备弹性体6。弹性体6产生将支承体4向下方按压的弹力。
127.根据该方案,能够抑制运动稳定性的降低。
128.在第三方案的移动体1中,在第二方案的基础上,弹性体6的弹簧常数比支承体4中设置有辅助轮3的部位的弹簧常数小。
129.根据该方案,能够抑制运动稳定性的降低。
130.在第四方案的移动体1中,在第二或第三方案的基础上,在多个辅助轮3和驱动轮2全部与供移动体1移动的移动面b1相接的状态下,在弹性体6产生的弹力的作用下多个辅助轮3被按压于移动面b1。
131.根据该方案,能够抑制运动稳定性的降低。
132.在第五方案的移动体1中,在第一至第四方案中任一方案的基础上,在主体10设置有两个驱动轮2。
133.根据该方案,能够抑制运动稳定性的降低。
134.在第六方案的移动体1中,在第一至第五方案中任一方案的基础上,还具备减振器7,该减振器7抑制支承体4相对于主体10的移动。
135.根据该方案,能够抑制运动稳定性的降低。
136.在第七方案的移动体1中,在第一至第六方案中任一方案的基础上,在支承体4且主体10的行进方向上的驱动轮2的两侧分别配置有一个以上的辅助轮3。
137.根据该方案,能够抑制运动稳定性的降低。
138.在第八方案的移动体1中,在第一至第七方案中任一方案的基础上,支承体4能够移动的移动方向dr1沿着供移动体1移动的移动面b1的法线vl1。
139.根据该方案,能够抑制运动稳定性的降低。
140.第九方案的输送装置x1使用了第一至第八方案中任一方案的移动体1,主体10具有保持部18,该保持部18保持被输送物a1。
141.根据该方案,能够抑制运动稳定性的降低。
142.在第十方案的输送装置x1中,在第九方案的基础上,保持部18包括连结部181,该
连结部181通过与被输送物a1连结而保持被输送物a1。
143.根据该方案,能够抑制运动稳定性的降低。
144.第十一方案的部件安装系统w1包括将部件安装于基板的至少一个部件安装机80。部件安装机80具有:馈送器台车81,其供给部件;以及安装主体82,其包括将部件安装于基板的安装头。馈送器台车81是由第九或第十方案的输送装置x1输送到安装主体82的被输送物a1。
145.根据该方案,能够抑制运动稳定性的降低。
146.对于第二至第八方案的结构,不是移动体1所必须的结构,可以适当省略。对于第十方案的结构,不是输送装置x1所必须的结构,可以适当省略。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。