1.本发明涉及用于对操作功率进行功率提升或增加到风力涡轮机的标称功率以上的风力涡轮机的控制。
技术背景
2.风力涡轮机可以提供功率提升,即,存在将功率增加到超过标称功率值的可能性。转速与功率一起增加。提升是可配置的,并且可以默认设置为标称功率的5%。如果发电机和转换器容量对此允许,则功率提升可以增加到更高的数量,例如标称功率的10%。这种过容量可以例如用于在强风时提升功率。
3.根据可能的已知实施方式,当桨距角(pitch angle)和风速达到了预定阈值以上时,功率提升在功率产生中是逐步增加。这样做是为了确保:在大多数极端负载驱动部件设计的情况下,在额定风力下不提升功率。通过首先不在额定风力下而是刚刚在负载已经降低所处的风力以上进行提升,极端负载不会由于附加的速度和功率产生而增加到其设计水平以上。功率输出中的离散跳变确定两个主要问题:如果提升百分比改变,则提升所应用的桨距角也必须被适配。例如,如果在偏离最佳桨距6度处可以实现5%的功率提升,则在偏离最佳桨距12度的桨距角下仅可以应用10%的提升。通过延迟提升阈值,损失大量功率;当应用提升时,涡轮机叶片迎风稍微变桨距(pitch),以平衡所提取的电功率的增加与所提取的风力。这种额外的桨距行程不是必需的,并且由于高负载,它会大大增加风力涡轮机部件(例如桨距轴承)中的累积结构损坏。
技术实现要素:
4.本发明的范围是提供一种用于控制风力涡轮机的控制方法和电路,以便优化提升的功率,从而导致增加的年发电量(aep),而与风力分布无关并且不超过叶片、塔架和其他结构风力涡轮机部件的极端结构容量。
5.这个范围由根据独立权利要求的主题来满足。本发明的有利实施例由从属权利要求来描述。
6.根据本发明的第一方面,提供一种控制风力涡轮机的方法,该方法包括根据表示风力涡轮机的提升水平的提升操作函数而将风力涡轮机的输出功率提升到风力涡轮机的标称功率以上的步骤,所述提升操作函数至少在操作变量的第一阈值和第二阈值之间是操作变量的渐增(crescent)函数。
7.根据本发明的第二方面,提供一种用于风力涡轮机的控制器,该控制器包括提升电路用于根据表示风力涡轮机的提升水平的提升操作函数而将风力涡轮机的输出功率提升到风力涡轮机的标称功率以上。提升操作函数至少在操作变量的第一阈值和第二阈值之间是操作变量的渐增函数,提升电路接收以下各项作为输入:启用标准命令,
期望的桨距角,和期望的功率参考,提升电路产生以下各项作为输出:桨距参考,和表示风力涡轮机的提升水平的提升功率参考。
8.在本发明的上下文中,“提升电路”可以被实现为:硬件电路和/或可编程逻辑电路,被配置和被布置用于实现指定的操作/活动。在可能的实施例中,可编程电路可以包括被编程为执行一组(或多组)指令(和/或配置数据)的一个或多个计算机电路。指令(和/或配置数据)可以是以存储在存储器中并可从存储器访问的固件或软件的形式。“提升电路”可以是风力涡轮机的控制器的一部分。
9.根据本发明的实施例,提升操作函数至少在第一阈值和第二阈值之间是操作变量的线性函数。提升操作函数可以在操作变量的第二阈值和第三阈值之间是常数。提升操作函数可以在操作变量的第三阈值和第四阈值之间是渐减的。
10.根据本发明的实施例,在风速的第一阈值和第二阈值之间,以恒定桨距限定提升操作函数。当速度和功率增加时保持桨距角恒定降低了桨距轴承损坏。
11.替选地,以在第一阈值和第二阈值之间变化的渐增桨距角限定提升操作函数。
12.根据本发明的另一实施例,桨距角在第一阈值和第二阈值之间保持恒定,并且在第二阈值和第三阈值之间例如线性地增加,即,动态提升通过保持桨距角恒定来增加功率,直到实现最大功率输出,并且当实现最大值时,然后如果风力增加则叶片进一步向外变桨距。这保持功率和速度恒定,从而跟随风力。
13.有利地,通过提供动态提升而不是现有技术的离散提升,本发明允许显著地增加aep。
14.必须注意,已经参考不同的主题描述了本发明的实施例。特别地,已经参考装置类型权利要求描述了一些实施例,而已经参考方法类型权利要求描述了其他实施例。然而,本领域技术人员将从以上和以下描述中想到:除非另外申报,除了属于一种类型的主题的特征的任何组合之外,与不同主题相关的特征之间(特别是装置类型权利要求的特征与方法类型权利要求的特征之间)的任何组合也被认为将通过本技术被公开。
附图说明
15.本发明的上述方面和其他方面从下文要描述的实施例的示例中是显而易见的,并且参考实施例的示例进行解释。下面将参考实施例的示例更详细地描述本发明,但是本发明不限于所述实施例的示例。
16.图1示出风力涡轮机的示意性截面,本发明的控制方法和电路可以应用于该风力涡轮机以控制功率提升。
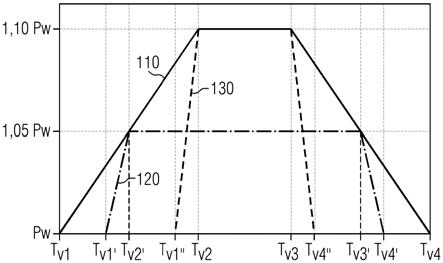
17.图2示出说明示出如何操作根据本发明的功率提升的图表。
18.图3示出表示根据本发明的用于控制功率提升的电路的示意图。
具体实施方式
19.附图中的说明是示意性的。注意,在不同的图中,向类似或同样的要素提供相同的
附图标记。
20.图1示出根据本发明的风力涡轮机1。风力涡轮机1包括安装在未描绘的基座上的塔架2。机舱3布置在塔架2的顶部上。风力涡轮机1还包括具有至少一个叶片4的风力转子5(在图1的实施例中,风力转子包括三个叶片4,其中,仅两个叶片4可见)。风力转子5围绕转轴y可转动。叶片4相对于转轴y基本上径向地并且沿着相应的纵轴x延伸。
21.风力涡轮机1包括发电机11,该发电机11包括定子20和转子30。转子30相对于定子20围绕转轴y可转动。风力转子5直接(例如直接驱动)或借助于可转动主轴9和/或通过齿轮箱(图1中未示出)与发电机11转动地耦合。示意性描绘的轴承组件8被提供以便将主轴9和转子5保持在适当位置。可转动主轴9沿着转轴y延伸。
22.风力转子5包括用于将相应的叶片4连接到风力转子5的三个法兰15。桨距轴承插入在每个叶片法兰15和相应的叶片4之间。液压桨距致动电路与叶片4的桨距轴承相关联,以调节每个叶片的桨距角,即每个叶片围绕相应的叶片纵轴x的角位置。液压桨距致动电路可以同时调节所有转子叶片4上的所有桨距角,和/或转子叶片4的个别变桨距(pitching)可以可用。在机舱3的与风力转子5相对的后侧后侧上,提供转换器21。变压器21电连接到发电机11,以将发电机11的电输出变换成在预定电压电平处的某一预定功率输出以提供给电连接到变压器21的电网。
23.风力涡轮机1包括具有处理器和存储器的控制器(未示出)。处理器基于存储在存储器中的指令执行计算任务。根据这些任务,操作中的风力涡轮机产生所请求的功率输出水平。特别地,功率输出水平可以是提升功率,即具有大于风力涡轮机1的标称输出功率pw的值。这可以通过经过相应地操作与叶片4的桨距轴承相关联的液压桨距致动电路来调节桨距角而获得。替选地,可以通过调节转换器21的功率输出来获得所请求的功率输出水平。
24.图2示出三个提升操作函数110、120、130,其可以由控制器产生以用于在标称输出功率pw以上操作风力涡轮机1。在笛卡尔图表上示出三个提升操作函数110、120、130,该笛卡尔图表具有表示操作变量的值的横坐标轴和表示输出功率的值(作为风力涡轮机1的标称功率输出pw的百分比)的纵坐标轴。根据本发明的不同实施例,操作变量可以是不同的,如在下面更好地阐明的。
25.根据本发明的第一实施例,根据第一提升操作函数110产生提升功率。第一提升操作函数110在操作变量的第一阈值tvl值和第二阈值tv2之间是操作变量的渐增函数。操作变量是风速,其可以是风速的测量值或估计值。特别地,第一提升操作函数110是风速的渐增线性函数。在第二阈值tv2,功率输出达到预定功率提升水平,其可能超过标称功率pw的10%(功率输出是标称功率pw的110%)。第一提升操作函数110在风速的第二阈值tv2值和第三阈值tv3之间是风速的常数函数,以及在风速的第三阈值tv3值和第四阈值tv4之间是风速的渐减函数。特别地,提升操作函数110在第三阈值tv3值和第四阈值tv4之间是风速的渐减线性函数。通过根据风速相关的查找表仅调节转换器21的功率输出,可以以恒定的桨距获得第一提升操作函数110。根据本发明的另一实施例,可以以可变桨距获得第一提升操作函数110。
26.根据本发明的其他实施例,操作变量可以是湍流强度或桨距角。
27.根据本发明的第二实施例,根据第二提升操作函数120产生提升功率。第二提升操作函数120在桨距角的第一阈值tvl'值和第二阈值tv2'之间是桨距角的渐增函数。特别地,
第二提升操作函数120是桨距角的渐增线性函数。在第二阈值tv2',功率输出达到预定功率提升水平,其可能超过标称功率pw的5%(功率输出是标称功率pw的105%)。第二提升操作函数120在桨距角的第二阈值tv2'值和第三阈值tv3'之间是桨距角的常数函数,以及在桨距角的第三阈值tv3'值和第四阈值tv4'之间是桨距角的渐减函数。特别地,第二提升操作函数120在第三阈值tv3'值和第四阈值tv4'之间是桨距角的渐减线性函数。通过相应地操作液压桨距致动电路以产生在第一阈值tvl'处的桨距最小值和第二阈值tv2'处的桨距最大值之间变化的预定桨距,以可变桨距获得第二提升操作函数120。
28.根据本发明的第三实施例,根据第三提升操作函数130产生提升功率。第三提升操作函数130在桨距角的第一阈值tvl”值和第二阈值tv2之间是桨距角的渐增函数。特别地,第三提升操作函数130是桨距角的渐增线性函数。在第二阈值tv2,功率输出达到预定功率提升水平,其可能超过标称功率pw的10%(功率输出是标称功率pw的110%)。第三提升操作函数130在桨距角的第二阈值tv2值和第三阈值tv3之间是桨距角的常数函数,以及在桨距角的第三阈值tv3值和第四阈值tv4'之间是桨距角的渐减函数。特别地,第三提升操作函数130在第三阈值tv3值和第四阈值tv4'之间是桨距角的渐减线性函数。与第二提升操作函数120类似,通过相应地操作液压桨距致动电路以产生在第一阈值tvl”处的桨距最小值和第二阈值tv2处的桨距最大值之间变化的预定桨距,以可变桨距获得第三提升操作函数130。
29.第一阈值tvl、tvl'、tvl”被选择为足够高以不在其中出现最高极端负载和最大疲劳负载的峰值推力处开始提升。
30.第二和第三提升操作函数120、130可以通过图3中表示的提升电路200来获得。提升电路200可以被实现为:硬件电路和/或可编程逻辑电路,被配置和被布置用于实现指定的操作/活动。提升电路200可以被包括在风力涡轮机1的控制器中。提升电路200接收作为输入的启用标准命令210(例如,取决于风速,使得在提升操作期间的风速被选择为足够高以不在其中出现最高极端负载和最大疲劳负载的峰值推力处开始提升)、期望的桨距角220和期望的功率参考230。提升电路200产生作为输出的桨距参考240和提升的功率参考250。提升电路200包括动态功率提升块260,该动态功率提升块260接收作为输入的启用标准命令210和期望的桨距角220并且产生作为输出的表示期望提升的百分比的动态功率提升信号265和提升的速度参考信号290。提升电路200包括速度-桨距控制器270,该速度-桨距控制器270接收作为输入的提升的速度参考信号290并产生作为输出的桨距参考240。提升电路200还包括速度-功率控制器280,该速度-功率控制器280接收作为输入的期望的功率参考230和动态功率提升信号265之和并且产生作为输出的提升的功率参考250。然后,提升电路200的输出是发送到转换器21的增加的功率参考和发送到液压桨距致动电路的顾及期望速度增加的桨距角。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
