1.本发明涉及超声波技术领域,具体涉及一种基于超声回波信号的风速风向测量方法及测量系统。
背景技术:
2.超声测风速采用的主要是时差法,其原理在于:超声波在流体中的传播速度会随着流体的流动速度变化而变化,那么由于顺流和逆流情况下的传播时间不同,根据顺逆流时间差就可以建立时差和流体流速的关系,求取瞬时流量值。
3.因此精确地测量回波时间显得尤为重要。对于目前最为简单普遍的阈值比较法测量前沿,由于存在比较电压,这种方法会存在回波前沿到达至幅值大于比较电压之间的时间误差,而这个误差会因回波幅度大小而发生变化,从而会导致误差的不确定而无法进行补偿。而且,当回波信号出现缺波或陷波时,测出的时间将会滞后一个或多个周期,引起的误差则会相应地变大,计算出的流量值会出现更大的偏差。目前主流的回波时间算法包括阈值比较法、辅助阈值的电平比较法、自适应滤波器参数估计的方法以及互相关算法。
4.阈值比较法考虑设置一个阈值电平,当回波信号或其包络大于该电压时,则将其位置作为回波时间特征点。但由于存在比较电压,这种方法会存在回波前沿到达至幅值大于比较电压之间的时间误差,而这个误差会随回波信号的幅度大小而发生变化,从而导致误差的不确定而无法进行补偿。而且,在回波信号段出现陷波和缺波时,测出的时间将滞后一个周期,当出现更多的缺波或陷波,则会滞后更多的周期,引起的误差则会相应的变大,计算出流量值则会出现更大的偏差。
5.辅助阈值的电平比较法考虑对回波信号进行hilbert变换,并在假定包络线起始部分与时间的增加呈线性关系的条件下,增设一个辅助阈值电平,通过两个阈值-时间坐标,采用线性拟合的方式得出回波起始时间点,从而得出回波时间。但该方法受限较大,对于不是线性或近线性的包络,则需添设更多的辅助阈值电平,且得采用抛物线的拟合方式;最终的实验结果误差也在0.1ms的量级,远未达到本课题所要求的0.1us的精度要求。
6.自适应滤波器参数估计的方法该方法考虑将信号的时域延迟转化为频域上的滤波器参数设计,将激励信号通过一个自适应滤波器所得到的滤波信号与回波信号进行均方差迭代比较,均方差小于一个阈值后停止迭代,再通过此时滤波器参数反推出延迟时间即为在该阈值误差下的回波时间。该方法理论上可以做到高精度,但当缺波和陷波发生在前两个振荡周期时,该方法误差会达到5%以上,精度远远不够,所以还需对其进行改进。
7.互相关算法考虑将模板回波信号与实采样回波信号进行互相关卷积处理,将处理后的波形进行包络检波,得到幅值最大点对应的时间即为回波时间。其优点在于该方法理论上精度能达到adc采样的最小误差,可以达到0.1us量级甚至更低,且对于噪声免疫性强,缺波和陷波也对结果影响不大;但该方法使用了模板,对每一个探头都需要重新进行模板采样,而且使用的是卷积算法,资源占用高,计算量大,故还需考虑进行简化。
8.因此,上述几种主流的回波时间算法存在计算量大,硬件结构复杂,同时容易受到
噪声干扰测量精度的问题。
技术实现要素:
9.为了克服现有技术的不足,本发明的目的在于提供一种基于超声回波信号的风速风向测量方法及测量系统,旨在解决现有技术中常规的回波时间算法存在计算量大,硬件结构复杂,同时容易受到噪声干扰测量精度的问题。
10.本发明采取以下技术方案实现:
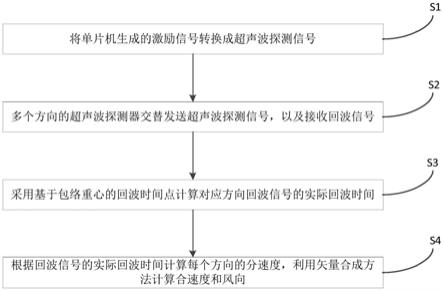
11.一种基于超声回波信号的风速风向测量方法,包括如下步骤:
12.步骤s1:将单片机生成的激励信号转换成超声波探测信号;
13.步骤s2:多个方向的超声波探测器交替发送超声波探测信号,以及接收回波信号;
14.步骤s3:采用基于包络重心的回波时间点计算对应方向回波信号的实际回波时间;
15.步骤s4:根据回波信号的实际回波时间计算每个方向的分速度,利用矢量合成方法计算合速度和风向。
16.为优化上述技术方案,采取的具体措施还包括:
17.进一步地,所述步骤s2中将多个超声波探测器按照互成九十度的方向间隔设置。
18.进一步地,所述步骤s3中采用基于包络重心的回波时间点计算对应方向回波信号的实际回波时间的具体过程如下:
19.s31:计算回波信号的相关特征值,采用线性拟合法拟合得到波形包络;
20.s32:计算波形包络的重心;
21.s33:采集超声波探测信号的发送时间和接收回波包络重心的时间点,计算实际回波时间;
22.s34:结合信道延迟,对实际回波时间进行优化,计算理论回波时间。
23.进一步地,所述步骤s31中计算回波信号波形的相关特征值,采用线性拟合法拟合得到波形包络,具体包括:
24.s311:计算波形平均值,将波形平均值向上平移四至六个数据点;
25.s312:根据波形平均值,结合波形特性获取上升过零点和下降过零点;
26.s313:根据上升过零点和下降过零点的中点计算峰值点坐标;
27.s314:根据上升过零点、下降过零点和峰值点坐标,采用线性拟合法拟合得到波形包络。
28.进一步地,所述步骤s34结合信道延迟,对实际回波时间进行优化,计算理论回波时间,具体包括:
29.s341:根据零风速状况,标定信道延迟;
30.s342:对每个方向的实际回波时间,去除对应方向的信道延迟,计算得到理论回波时间。
31.进一步地,步骤s32中计算波形包络的重心的具体过程为:建立回波信号的上包络函数,根据上包络函数计算包络重心,
[0032][0033]
其中:f(x)表示上包络函数,xc表示包络重心,x表示时间点的坐标。
[0034]
进一步地,所述步骤s4根据回波信号的回波时间计算每个方向的分速度,利用矢量合成方法计算合速度和风向,具体包括:
[0035]
s41:建立关于x轴和y轴的二维坐标系,分别计算x轴和y轴方向的分速度,
[0036][0037][0038]
其中:t
rw
表示x轴上超声波探测器a收到超声波探测信号回波的时间,t
re
表示x轴上超声波探测器b收到超声波探测信号回波的时间,t
rn
表示x轴上超声波探测器c收到超声波探测信号回波的时间,t
rs
表示x轴上超声波探测器d收到超声波探测信号回波的时间,l表示超声波探测信号的路径长度,u表示超声波探测信号的风速,θ表示超声波探测信号的发射角;
[0039]
s42:将x轴和y轴的分速度利用矢量合成法计算合速度和风向角,
[0040][0041][0042]
其中:u表示合速度,α表示风向角。
[0043]
一种基于超声回波信号的风速风向测量系统,包括:
[0044]
电源模块,用于提供稳定的电流;
[0045]
电压转换模块,用于将电流转化升压至高压;
[0046]
控制模块,用于控制高压脉冲模块产生激励信号,以及根据超声波回波信号计算风速和风向;
[0047]
超声换能模块,用于根据激励信号产生并发送超声波信号,以及接收超声波回波信号;
[0048]
信号处理模块,用于将超声波回波信号进行放大和滤波;
[0049]
数模转换模块,用于将超声波回波信号进行模数转换后并发送至控制模块;
[0050]
智能终端,用于收集存储计算的风速和风向。
[0051]
本发明的有益效果:
[0052]
本发明一种基于超声回波信号的风速风向测量方法,与现有方法相比,所采用的包络重心计算回波时间点的方法可以不受信号幅度波动的影响,具有算法简单稳定性高,测量精度高的优点。一种基于超声回波信号的风速风向测量系统,具有实现成本小,硬件结构简单的特点。
附图说明
[0053]
图1为本发明的工作流程示意图。
[0054]
图2为本发明图1中步骤3的工作流程图。
[0055]
图3为本发明基于超声回波信号的风速风向测量系统的模块示意图。
具体实施方式
[0056]
为了阐明本发明的技术方案和工作原理,下面结合附图于具体实施例对本发明作进一步详细描述,需要说明的是,在不相冲突的前提下,以下描述的各实施例之间或各技术特征之间可以任意组合形成新的实施例。
[0057]
如图1-2所示,一种基于超声回波信号的风速风向测量方法,所述方法包括如下步骤:
[0058]
步骤s1:将单片机生成的激励信号转换成超声波探测信号;
[0059]
步骤s2:多个方向的超声波探测器交替发送超声波探测信号,以及接收回波信号;
[0060]
具体而言,在利用超声波信号进行风速风量的测量过程中,由于风速和风向是多方向多角度变化的,因此需要在多个方向设置多个超声波探测器,采用交替发射的方式,采集多个角度的回波信号,便于后续步骤对回波信号的处理和分析。
[0061]
其中:将四个超声波探测器按照四个方位互成九十度间隔设置。
[0062]
步骤s3:采用基于包络重心的回波时间点计算对应方向回波信号的实际回波时间;
[0063]
具体而言,由于包络重心的回波时间点不受回波信号的幅度波动而产生变化,且检测精度高。
[0064]
s31:计算回波信号的相关特征值,采用线性拟合法拟合得到波形包络,所述相关特征值包括波形平均值、上升过零点、下降过零点和峰值点;
[0065]
s311:计算波形平均值,将波形平均值向上平移四至六个数据点;
[0066]
s312:根据波形平均值,结合波形特性获取上升过零点和下降过零点;
[0067]
s313:根据上升过零点和下降过零点的中点计算峰值点坐标;
[0068]
s314:根据上升过零点、下降过零点和峰值点坐标,采用线性拟合法拟合得到波形包络;
[0069]
s32:计算波形包络的重心;
[0070]
具体而言,建立回波信号的上包络函数,根据上包络函数计算包络重心,
[0071][0072]
其中:f(x)表示上包络函数,xc表示包络重心,x表示时间点的坐标。
[0073]
s33:采集超声波探测信号的发送时间和接收回波包络重心的时间点,计算实际回波时间;
[0074]
s34:结合信道延迟,对实际回波时间进行优化,计算理论回波时间。
[0075]
s341:根据零风速状况,标定信道延迟;
[0076]
s342:对每个方向的实际回波时间,去除对应方向的信道延迟,计算得到理论回波
时间。
[0077]
步骤s4:根据回波信号的实际回波时间计算每个方向的分速度,利用矢量合成方法计算合速度和风向;
[0078]
具体而言,。
[0079]
s41:建立关于x轴和y轴的二维坐标系,分别计算x轴和y轴方向的分速度,
[0080][0081][0082]
其中:t
rw
表示x轴上超声波探测器a收到超声波探测信号回波的时间,t
re
表示x轴上超声波探测器b收到超声波探测信号回波的时间,t
rn
表示x轴上超声波探测器c收到超声波探测信号回波的时间,t
rs
表示x轴上超声波探测器d收到超声波探测信号回波的时间,l表示超声波探测信号的路径长度,,u表示超声波探测信号的风速,θ表示超声波探测信号的发射角;
[0083]
s42:将x轴和y轴的分速度利用矢量合成法计算合速度和风向角,
[0084][0085][0086]
其中:u表示合速度,α表示风向角。
[0087]
具体实施例二
[0088]
一种基于超声回波信号的风速风向测量系统,包括电源模块,用于提供稳定的电流;电压转换模块,用于将电流转化升压至高压;控制模块,用于控制高压脉冲模块产生激励信号,以及根据超声波回波信号计算风速和风向;超声换能模块,用于根据激励信号产生并发送超声波信号,以及接收超声波回波信号;信号处理模块,用于将超声波回波信号进行放大和滤波;数模转换模块,用于将超声波回波信号进行模数转换后并发送至控制模块;智能终端,用于收集控制模块计算存储的风速和风向数据。
[0089]
其中,电源模块采用稳压电源,控制模块采用stm32系列单片机,超声换能模块采用超声波换能器,超声波换能器的发射端与高压脉冲模块电性连接,用于产生超声波信号,超声波换能器的接收端与信号处理模块电性连接,用于接收回波信号,数模转换模块采用a/d数模转换模块,智能终端采用计算机,其与控制模块采用串口通信连接。
[0090]
不难发现,本实施方式为与第一实施方式相对应的系统实施例,本实施方式可与第一实施方式互相配合实施。第一实施方式中提到的相关技术细节在本实施方式中依然有效,为了减少重复,这里不再赘述。相应地,本实施方式中提到的相关技术细节也可应用在第一实施方式中。
[0091]
值得一提的是,本实施方式中所涉及到的各模块均为逻辑模块,在实际应用中,一个逻辑单元可以是一个物理单元,也可以是一个物理单元的一部分,还可以以多个物理单元的组合实现。此外,为了突出本发明的创新部分,本实施方式中并没有将与解决本发明所提出的技术问题关系不太密切的单元引入,但这并不表明本实施方式中不存在其它的单
元。
[0092]
以上所述的仅是本发明的实施例,方案中公知的具体结构及特性等常识在此未作过多描述,所属领域普通技术人员知晓申请日或者优先权日之前发明所属技术领域所有的普通技术知识,能够获知该领域中所有的现有技术,并且具有应用该日期之前常规实验手段的能力,所属领域普通技术人员可以在本技术给出的启示下,结合自身能力完善并实施本方案,一些典型的公知结构或者公知方法不应当成为所属领域普通技术人员实施本技术的障碍。应当指出,对于本领域的技术人员来说,在不脱离本发明结构的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和专利的实用性。本技术要求的保护范围应当以其权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。