1.本说明书涉及车辆。
背景技术:
2.提出了各种车辆。例如,提出了具备变更车体的车辆宽度方向的倾斜角的倾斜角变更部、以及控制倾斜角变更部的倾斜控制部的车辆。
3.专利文献1:日本特开2016-222024号公报
4.车辆可以具备产生力的各种装置。例如,车辆可以具备作为转向操纵轮的前轮、以及辅助转向操纵的马达。这样的马达以各种方式使车辆的运动变化。例如,当在车辆前进时马达使前轮向右转动的情况下,车辆开始向右转弯,横摆角加速度增大,且横摆角速度增大。一般而言,作用于车辆的力与车辆的运动的关系很复杂。而且,在控制车辆的点上存在研究的余地。
技术实现要素:
5.本说明书公开控制车辆的新的技术。
6.本说明书所公开的技术能够作为以下的应用例来实现。
7.[应用例1]
[0008]
一种车辆,具备:
[0009]
车体;
[0010]
n个车轮,包含一个以上的前轮和一个以上的后轮,上述n个车轮包含能够在上述车辆的宽度方向上转动的一个以上的转动轮,其中,n为2以上的整数;
[0011]
力产生装置,构成为产生使横摆角加速度变化的力;以及
[0012]
力控制装置,构成为控制上述力产生装置,
[0013]
上述车体的重心配置在从上述车辆转弯时的上述车辆的自转中心向前侧或后侧远离的位置,
[0014]
上述力控制装置通过控制上述力产生装置来控制作用于上述车体的上述宽度方向的侧倾扭矩。
[0015]
根据该结构,力控制装置能够通过使用使横摆角加速度变化的力,来控制作用于车体的侧倾扭矩。
[0016]
[应用例2]
[0017]
根据应用例1所述的车辆,其中,
[0018]
上述力产生装置构成为对上述一个以上的转动轮赋予转动扭矩,上述转动扭矩是控制上述一个以上的转动轮的上述宽度方向的转动的扭矩,
[0019]
将因通过上述一个以上的转动轮的转动而产生的横摆角加速度的成分、和上述重心与上述自转中心之间的位置的差异而产生的侧倾扭矩称为第一种侧倾扭矩,
[0020]
上述力控制装置确定表示基准方向和基准大小的基准信息,其中,上述基准方向
是应作用于上述车体的上述第一种侧倾扭矩的方向的基准,上述基准大小是大小的基准,
[0021]
以上述第一种侧倾扭矩的方向与上述基准方向相同,且上述基准大小越大上述第一种侧倾扭矩的大小越大的方式,使上述力产生装置产生上述转动扭矩。
[0022]
根据该结构,力控制装置能够使用基准信息,控制作用于车体的侧倾扭矩。
[0023]
[应用例3]
[0024]
根据应用例2所述的车辆,其中,
[0025]
将车速、上述基准方向、上述基准大小以及上述车辆的横摆角速度分别保持恒定的条件称为第一条件,
[0026]
在上述第一条件下,上述力控制装置使上述力产生装置产生上述一个以上的转动轮的转动的角度与表示前进的转动的角度之间的差越大,具有越小的大小的转动扭矩。
[0027]
根据该结构,力控制装置能够使第一种侧倾扭矩接近具有基准方向和基准大小的侧倾扭矩。
[0028]
[应用例4]
[0029]
根据应用例2或3所述的车辆,其中,
[0030]
上述基准信息表示从上述车体的侧倾角朝向基准的侧倾角的基准侧倾方向、以及上述车体的上述侧倾角与上述基准的侧倾角之间的差的大小亦即角度差大小,
[0031]
上述基准侧倾方向表示上述基准方向,
[0032]
上述角度差大小表示上述基准大小。
[0033]
根据该结构,力控制装置通过使用转动扭矩,能够使实际的侧倾角接近基准的侧倾角。
[0034]
[应用例5]
[0035]
根据应用例2或3所述的车辆,其中,
[0036]
上述基准信息表示上述车体的侧倾角加速度,
[0037]
上述侧倾角加速度的大小表示上述基准大小,
[0038]
与上述侧倾角加速度的方向相反的方向表示上述基准方向。
[0039]
根据该结构,力控制装置通过使用转动扭矩,能够减少侧倾角加速度。
[0040]
[应用例6]
[0041]
根据应用例2~5中任一项所述的车辆,其中,
[0042]
上述力控制装置使用上述基准信息、车速以及上述一个以上的转动轮的转动的角度来控制上述力产生装置,
[0043]
上述基准大小越大上述转动扭矩的大小越大,上述车速越大上述转动扭矩的大小越小,上述一个以上的转动轮的上述转动的上述角度与表示前进的转动的角度之间的差越大上述转动扭矩的大小越小。
[0044]
根据该结构,力控制装置能够使第一种侧倾扭矩的大小接近基准大小。
[0045]
[应用例7]
[0046]
根据应用例2~6中任一项所述的车辆,其中,
[0047]
上述一个以上的前轮包含上述一个以上的转动轮,
[0048]
上述车体的重心配置在从上述自转中心向前侧远离的位置,
[0049]
上述转动扭矩的方向是与上述基准方向相反侧的方向。
[0050]
根据该结构,在一个以上的前轮包含一个以上的转动轮的情况下,能够适当地控制力产生装置。
[0051]
此外,本说明书中公开的技术能够以各种方式来实现,例如,能够以车辆、车辆的控制装置、车辆的控制方法等方式来实现。
附图说明
[0052]
图1的(a)~(c)是表示作为一个实施例的车辆10的说明图。
[0053]
图2是表示作为一个实施例的车辆10的说明图。
[0054]
图3的(a)、(b)是表示水平的地面gl上的车辆10的状态的示意图。(c)、(d)是车辆10的简化的后视图。
[0055]
图4是转弯时的力的平衡的说明图。
[0056]
图5是表示车轮角aw与转弯半径r的简化后的关系的说明图。
[0057]
图6的(a)~(c)是由车辆10的横摆角加速度引起的侧倾扭矩的说明图。
[0058]
图7是表示与车辆10的控制相关的结构的框图。
[0059]
图8是表示转向操纵马达65的控制处理的例子的流程图。
[0060]
图9的(a)~(c)是表示第一增益gp1的例子的图表。(d)是表示侧倾角度差dar与中间控制值ctq的关系的例子的图表。(e)~(g)是表示追加角速度awd’的例子的图表。
[0061]
图10的(a)~(c)是表示转动扭矩tqw的例子的图表。
[0062]
图11是表示倾斜马达(lean motor)25的控制处理的例子的流程图。
[0063]
图12是第二实施例的车辆的立体图。
[0064]
图13是表示转向操纵马达65a的控制处理的例子的流程图。
[0065]
图14的(a)是表示侧倾角加速度ar”与目标侧倾扭矩tqt的关系的例子的图表。(b)~(d)是表示追加角速度awd’的例子的图表。(e)~(g)是表示转动扭矩tqw的例子的图表。
[0066]
图15的(a)、(b)是后轮为转动轮的情况下的侧倾扭矩tq3、tq4的说明图。
具体实施方式
[0067]
a.第一实施例:
[0068]
a1.车辆10的结构:
[0069]
图1的(a)~图1的(c)、图2是表示作为一个实施例的车辆10的说明图。图1的(a)表示车辆10的右视图,图1的(b)表示车辆10的俯视图,图1的(c)表示车辆10的仰视图,图2示出车辆10的后视图。图1的(a)~图1的(c)、图2中,示出配置在水平的地面gl(图1的(a))上且未倾斜的状态的车辆10。图1的(a)~图1的(c)、图2中示出六个方向df、db、du、dd、dr、dl。前方df是车辆10的前方(即,前进方向),后方db是前方df的相反方向。上方du是垂直上方,下方dd是垂直下方(即,上方du的相反方向)。垂直下方是重力的方向。右方dr从向前方df行驶的车辆10观察的右方,左方dl是右方dr的相反方向。方向df、db、dr、dl均为水平的方向。右和左的方向dr、dl垂直于前方df。
[0070]
在本实施例中,车辆10是供一人乘坐的小型车辆。车辆10(图1的(a)、图1的(b))是具有车体90、前轮12f、左后轮12l以及右后轮12r的三轮车。前轮12f是转动轮的例子,配置在车辆10的宽度方向的中心。转动轮是能够在车辆10的宽度方向(即,右方和左方)上转动
的车轮。转动轮的行进方向能够从前方df向右和左旋转。在本实施例中,前轮12f以能够转动的方式被支承于车体90。后轮12r、12l是驱动轮。后轮12r、12l相对于车辆10的宽度方向的中心对称地、相互分离地配置。
[0071]
车体90(图1的(a))具有主体部20。主体部20具有底部20b、连接于底部20b的前方df侧的前壁部20a、连接于底部20b的后方db侧的后壁部20c、以及从后壁部20c的上端朝向后方db延伸的支承部20d。主体部20例如具有金属制的框架、以及固定于框架的面板。
[0072]
车体90还具有固定在底部20b上的座椅11、配置于座椅11的前方df侧的加速踏板45和制动踏板46、固定于底部20b的控制装置100和蓄电池120、固定于前壁部20a的上方du侧的端部的前轮支承装置41、安装于前轮支承装置41的方向盘41a。虽然省略图示,但在主体部20可以固定其他部件(例如,车顶、前照灯等)。车体90包含固定于主体部20的部件。
[0073]
前轮支承装置41(图1的(a))是将前轮12f支承为能够以转动轴ax1为中心转动的装置。前轮支承装置41具有前叉17、轴承68以及转向操纵马达65。前叉17将前轮12f支承为能够旋转,例如,是具有螺旋弹簧和减震器的伸缩式的叉。轴承68连结主体部20的前壁部20a和前叉17。轴承68以转动轴ax1为中心将前叉17(进而,前轮12f)支承为能够相对于车体90向左右旋转。前叉17的可旋转范围也可以是预先规定的角度范围(例如,小于180度的范围)。例如,也可以通过前叉17与车体90的其他部分接触,来限制角度范围。转向操纵马达65是电动马达,与主体部20的前壁部20a和前叉17连接。转向操纵马达65产生使前叉17(进而,前轮12f)在宽度方向(即,右方和左方)上旋转的扭矩。像这样,转向操纵马达65构成为对前轮12f赋予控制前轮12f的宽度方向的转动的扭矩亦即转动扭矩(以下,也称为转动驱动装置65)。
[0074]
方向盘41a是能够向右方和左方旋转的部件。方向盘41a相对于表示前进的规定的旋转位置(称为前进旋转位置)的旋转角度(也称为输入角)是表示转弯方向和转弯的程度的转弯输入信息的例子。在本实施例中,“输入角=零”表示前进,“输入角>零”表示右转弯,“输入角<零”表示左转弯。输入角的大小(即,绝对值)表示转弯的程度。驾驶员通过操作方向盘41a,能够输入转弯输入信息。
[0075]
此外,在本实施例中,方向盘41a和前叉17没有机械连接。然而,也可以是弹性体(例如,螺旋弹簧、板簧等弹簧、橡胶、硅等树脂)连接方向盘41a和前叉17。
[0076]
车轮角aw(图1的(b))是表示前轮12f相对于车体90的方向的角度。在本实施例中,车轮角aw是以前方df为基准的前轮12f的行进方向d12的角度。车轮角aw表示围绕与车体90的上方(在车体90相对于垂直上方du未倾斜的情况下,与垂直上方du相同)平行的轴的角度。行进方向d12是与前轮12f的旋转轴axw1垂直的方向。在本实施例中,“aw=零”表示“方向d12=前方df”。“aw>零”表示方向d12朝向右方dr侧(转弯方向=右方dr)。“aw<零”表示方向d12朝向左方dl侧(转弯方向=左方dl)。车轮角aw表示前轮12f的转动的角度。在转向操纵前轮12f的情况下,车轮角aw对应于所谓的转向操纵角。
[0077]
转向操纵马达65由控制装置100(图1的(a))控制。在由转向操纵马达65产生的转动扭矩较小的情况下,允许前轮12f的方向d12与输入角独立地向左或右转动。对于转向操纵马达65的控制的详细内容后述。
[0078]
图1的(a)中的角度ca是所谓的后倾角。后倾角ca为车体90的上方(在车体90相对于垂直上方du未倾斜的情况下,与垂直上方du相同)和沿着转动轴ax1朝向垂直上方du侧的
方向所成的角度。在本实施例中,后倾角ca大于零。因此,沿着转动轴ax1朝向垂直上方du侧的方向向斜后方倾斜。
[0079]
如图1的(a)所示,在本实施例中,前轮支承装置41的转动轴ax1与地面gl的交点p2位于比前轮12f的与地面gl的接触中心p1靠前方df侧。这些点p1、p2之间的后方db的距离lt也被称为轨迹。正的轨迹lt表示接触中心p1位于比交点p2靠后方db侧。此外,如图1的(a),图1的(c)所示,接触中心p1是前轮12f与地面gl的接触区域ca1的重心。接触区域的重心是假设在接触区域内质量均衡地分布的情况下的重心的位置。也同样地确定右后轮12r与地面gl的接触区域car的接触中心pbr、和左后轮12l与地面gl的接触区域cal的接触中心pbl。
[0080]
如图2所示,两个后轮12r、12l可旋转地被支承于后轮支承部80。后轮支承部80具有连杆机构30、固定在连杆机构30的上部的倾斜马达25、固定在连杆机构30的上部的第一支承部82、以及固定在连杆机构30的前部的第二支承部83(图1的(a))。为了说明,在图1的(a)中,也用实线示出后轮支承部80中的隐藏于右后轮12r的部分。在图1的(b)中,用实线示出隐藏于主体部20的后轮支承部80、后轮12r、12l以及后述的连结杆75。在图1的(a)~图1的(c)中,简化地示出连杆机构30。
[0081]
第一支承部82(图2)在后轮12r、12l的上方du侧,包含与右方dr平行地延伸的板状的部分。第二支承部83(图1的(a)、图1的(b))配置在连杆机构30的前方df侧的左后轮12l与右后轮12r之间。
[0082]
右后轮12r(图1的(b)、图2)连接到右驱动马达51r。右驱动马达51r是电动马达,固定在后轮支承部80的右侧的部分。右驱动马达51r的旋转轴axw2(图2)与右后轮12r的旋转轴相同。左后轮12l和左驱动马达51l的结构分别与右后轮12r和右驱动马达51r的结构相同。这些驱动马达51l、51r是直接驱动后轮12r、12l的轮内马达。以下,将左驱动马达51l和右驱动马达51r的整体也称为驱动系统51s。
[0083]
在图1的(a)~图1的(c)、图2中,示出车体90不倾斜地直立在水平的地面gl上的状态(后述的侧倾角ar为零的状态)。以下,将该状态称为直立状态。在直立状态下,左后轮12l的旋转轴axw3(图2)和右后轮12r的旋转轴axw2位于同一直线上,且与右方dr平行。
[0084]
连杆机构30(图2)是所谓的平行连杆。连杆机构30具有朝向右方dr依次排列的三个纵向连杆部件33l、21、33r、以及朝向下方dd依次排列的两个横向连杆部件31u、31d。当车体90不倾斜地直立在水平的地面gl上时,纵向连杆部件33l、21、33r平行于垂直方向,横向连杆部件31u、31d平行于水平方向。两个纵向连杆部件33l、33r和两个横向连杆部件31u、31d形成平行四边形连杆机构。中纵向连杆部件21连结横向连杆部件31u、31d的中央部分。这些连杆部件33l、33r、31u、31d、21相互可旋转地连结。在本实施例中,旋转轴平行于前方df。相互连结的连杆部件也可以在预先确定的角度范围(例如,小于180度的范围)内,能够以旋转轴为中心相对地旋转。在左纵向连杆部件33l,固定有左驱动马达51l。在右纵向连杆部件33r,固定有右驱动马达51r。在中间纵向连杆部件21的上部,固定有第一支承部82和第二支承部83(图1的(a))。连杆部件33l、21、33r、31u、31d以及支承部82、83例如由金属形成。
[0085]
在本实施例中,连杆机构30具有用于可旋转地连结多个连杆部件的轴承。例如,轴承38可旋转地连结下横向连杆部件31d和中间纵向连杆部件21,轴承39可旋转地连结上横向连杆部件31u和中间纵向连杆部件21。虽然省略说明,但其他多个连杆部件也通过轴承连结。
[0086]
倾斜马达(lean motor)25是构成为驱动连杆机构30的倾斜驱动装置的例子,在本实施例中,是电动马达。倾斜马达25与中间纵向连杆部件21和上横向连杆部件31u连接。倾斜马达25的旋转轴与轴承39的旋转轴相同,位于车辆10的宽度方向的中心。倾斜马达25使上横向连杆部件31u相对于中纵向连杆部件21旋转。由此,车辆10朝向宽度方向(即,右方或左方)倾斜。像这样倾斜的运动也被称为侧倾运动。
[0087]
图3的(a)、图3的(b)是表示水平的地面gl上的车辆10的状态的示意图。在图中,示出车辆10的简化后的后视图。图3的(a)示出车辆10直立的状态,图3的(b)示出车辆10倾斜的状态。如图3的(a)所示,在上横向连杆部件31u相对于中间纵向连杆部件21正交的情况下,所有车轮12f、12r、12l相对于水平的地面gl直立。而且,包含车体90的车辆10的整体相对于地面gl直立。图中的车体上方dvu为车体90的上方。在车辆10未倾斜的状态下,车体上方dvu与上方du相同。在本实施例中,对车体90预先确定的上方被用作车体上方dvu。
[0088]
如图3的(b)所示,在后视图上,通过中间纵向连杆部件21相对于上横向连杆部件31u沿顺时针方向旋转,右后轮12r相对于车体90相对地向车体上方dvu侧移动,左后轮12l向相反侧移动。其结果是,在所有车轮12f、12r、12l与地面gl接触的状态下,这些车轮12f、12r、12l相对于地面gl向右方dr侧倾斜。而且,包含车体90的车辆10整体相对于地面gl向右方dr侧倾斜。虽然省略图示,但通过中间纵向连杆部件21相对于上横向连杆部件31u沿逆时针方向旋转,车辆10向左方dl侧倾斜。
[0089]
像这样,在上横向连杆部件31u相对于中间纵向连杆部件21倾斜的情况下,右后轮12r和左后轮12l中的一方相对于车体90相对地向车体上方dvu侧移动,另一方相对于车体90相对地向与车体上方dvu相反方向侧移动。连杆机构30能够使左后轮12l和右后轮12r的车体上方dvu的相对位置变化。其结果是,车体90相对于地面gl倾斜。
[0090]
此外,在本实施例中,横向连杆部件31u、31d可旋转地支承于车体90(经由中间纵向连杆部件21、第一支承部82以及后述的悬架系统70)。而且,后轮12r、12l经由包含横向连杆部件31u、31d的多个部件与车体90连接。因此,通过使横向连杆部件31u、31d相对于车体90旋转,后轮12r、12l与车体90之间的车体上方dvu的距离发生变化。横向连杆部件31u、31d的旋转轴(轴承39、38)配置于右后轮12r和左后轮12l之间。因此,在横向连杆部件31u、31d旋转的情况下,右后轮12r的移动方向是与左后轮12l的移动方向相反的方向。
[0091]
在图3的(b)中,车体上方dvu相对于上方du向右方dr侧倾斜。以下,将朝向前方df观察车辆10时的上方du与车体上方dvu之间的角度称为侧倾角ar或倾斜角ar。在这里,“ar>零”表示朝右方dr侧的倾斜,“ar<零”表示朝左方dl侧的倾斜。在车辆10倾斜的情况下,包含车体90的车辆10的整体大致向相同的方向倾斜。因此,可以说车体90的侧倾角ar是车辆10的侧倾角ar。
[0092]
在图3的(b)中,示出连杆机构30的控制角ac。控制角ac表示中间纵向连杆部件21的朝向相对于上横向连杆部件31u的朝向的角度。“ac=零”表示中间纵向连杆部件21相对于上横向连杆部件31u垂直。“ac>零”表示在图3的(b)的后视图中,中间纵向连杆部件21相对于上横向连杆部件31u沿顺时针方向倾斜。虽然省略图示,但“ac<零”表示中纵向连杆部件21相对于上横向连杆部件31u沿逆时针方向倾斜。如图示那样,在车辆10位于水平的地面gl(即,垂直于垂直上方du的地面gl)上的情况下,控制角ac与侧倾角ar几乎相同。
[0093]
图3的(a)、图3的(b)中的地面gl上的轴axl是倾斜轴axl。连杆机构30和倾斜马达
25能够使车辆10以倾斜轴axl为中心向右和左倾斜。以下,将倾斜轴axl也称为侧倾轴。在本实施例中,侧倾轴axl是通过前轮12f与地面gl的接触中心p1,且平行于前方df的直线。连杆机构30是构成为使车体90在车辆10的宽度方向倾斜的倾斜装置的例子(也称为倾斜装置30)。
[0094]
图3的(c)、图3的(d)与图3的(a)、图3的(b)同样表示车辆10的简化的后视图。在图3的(c)、图3的(d)中,地面glx相对于垂直上方du斜着倾斜(右侧较高,左侧较低)。图3的(c)示出控制角ac为零的状态。在该状态下,所有车轮12f、12r、12l相对于地面glx直立。而且,车体上方dvu相对于地面glx垂直,另外,相对于垂直上方du向左方dl侧倾斜。
[0095]
图3的(d)示出侧倾角ar为零的状态。在该状态下,上横向连杆部件31u与地面glx几乎平行,相对于中间纵向连杆部件21向逆时针的方向倾斜。另外,车轮12f、12r、12l相对于地面gl倾斜。
[0096]
像这样,在地面glx倾斜的情况下,车体90的侧倾角ar可能与连杆机构30的控制角ac不同。
[0097]
此外,后轮支承部80具有停止连杆机构30的运动的未图示的锁定机构。通过使锁定机构工作,控制角ac被固定。例如,当车辆10停车时,控制角ac被固定为零。
[0098]
如图1的(b)、图2所示,在本实施例中,主体部20通过悬架系统70和连结杆75,连结于后轮支承部80。悬架系统70具有左悬架70l和右悬架70r。悬架70l、70r分别连接于主体部20的支承部20d和后轮支承部80的第一支承部82。悬架70l、70r具有螺旋弹簧71l、71r和减震器72l、72r,可伸缩。悬架系统70允许后轮支承部80与主体部20之间的相对的运动。
[0099]
如图1的(a)、图1的(b)所示,连结杆75是向前方df上延伸的杆。连结杆75配置于车辆10的宽度方向的中心。连结杆75的前方df侧的端部可旋转地连结到主体部20的后壁部20c(例如,球形接头)。连结杆75的后方db侧的端部可旋转地连结到后轮支承部80的第二支承部83(例如,球形接头)。
[0100]
图4是转弯时的力的平衡的说明图。在图中,示出转弯方向为右方的情况下的后轮12r、12l的后视图。如后所述,在转弯方向为右方的情况下,控制装置100(图1的(a))有控制转向操纵马达65和倾斜马达25使得后轮12r、12l(进而,车体90)相对于地面gl向右方dr倾斜的情况。
[0101]
在图4中,示出重心90c。重心90c是车体90的重心。车体90的重心90c是车体90载有乘员(可能的话也有货物)的状态下的重心。
[0102]
图中的第一力f1是作用于车体90的离心力。第二力f2是作用于车体90的重力。以下,视为作用于车体90的力作用于车体90的重心90c。在这里,将车体90的质量设为m(kg),将重力加速度设为g(约为9.8m/s2),将车辆10相对于垂直方向的侧倾角设为ar(度),将转弯时的车辆10的速度(即,车速)设为v(m/s),将转弯半径设为r(m)。第一力f1和第二力f2通过以下的式1、式2来表示。
[0103]
(式1)f1=(m*v2)/r
[0104]
(式2)f2=m*g
[0105]
在这里,*是相乘符号(以下,相同)。
[0106]
另外,图中的力f1b是第一力f1的垂直于车体上方dvu的方向的成分。力f2b是第二力f2的垂直于车体上方dvu的方向的成分。力f1b和力f2b通过以下的式3、式4来表示。
[0107]
(式3)f1b=f1*cos(ar)
[0108]
(式4)f2b=f2*sin(ar)
[0109]
在这里,“cos()”是余弦函数,“sin()”是正弦函数(以下,相同)。
[0110]
力f1b是使车体上方dvu向左方dl侧旋转的成分,力f2b是使车体上方dvu向右方dr侧旋转的成分。在车辆10保持侧倾角ar(进一步,速度v和转弯半径r)并继续转弯的情况下,f1b与f2b的关系通过以下的式5来表示。
[0111]
(式5)f1b=f2b
[0112]
若将上述的式1~式4代入式5,则转弯半径r通过以下的式6来表示。
[0113]
(式6)r=v2/(g*tan(ar))
[0114]
在这里,“tan()”是正切函数(以下,相同)。
[0115]
式6不依赖于车体90的质量m而成立。在这里,通过将式6的“ar”置换为不区分左方和右方地表示侧倾角ar的大小的参数ara(在这里,为侧倾角ar的绝对值)而得到的以下的式6a与车体90的倾斜方向无关地成立。
[0116]
(式6a)r=v2/(g*tan(ara))
[0117]
图5是表示简化了车轮角aw与转弯半径r的关系的说明图。在图中,示出朝向下方dd观察到的车轮12f、12r、12l。在这里,为了简化说明,假设侧倾角ar为零(即,车体上方dvu与下方dd平行)。在图中,前轮12f的行进方向d12向右方dr转动,车辆10向右方dr转弯。图中的前中心cf是前轮12f的接触中心p1(图1的(c))。在朝向下方dd观察车辆10的情况下,前中心cf位于包含前轮12f的旋转轴axw1的直线上。后中心cb是两个后轮12r、12l的接触中心pbr、pbl(图1的(c))之间的中心。在朝向下方dd观察直立的车辆10的情况下,后中心cb位于包含后轮12r、12l的旋转轴axw2、axw3的直线上的后轮12r、12l之间的中央。位于车辆10的右方dr侧的中心cr是转弯的中心。车辆10的转弯运动包含车辆10的公转运动和车辆10的自转运动。中心cr是公转运动的中心(也称为公转中心cr)。此外,在本实施例中,后轮12r、12l不是转动轮,前轮12f是转动轮。因此,自转中心与后中心cb大致相同。轴距lh是前中心cf与后中心cb之间的前方df的距离。如图1的(a)所示,轴距lh与前轮12f的旋转轴axw1和后轮12r、12l的旋转轴axw2、axw3之间的前方df的距离相同。
[0118]
如图5所示,前中心cf、后中心cb以及公转中心cr形成直角三角形。点cb的内角为90度。点cr的内角与车轮角aw相同。因此,车轮角aw与转弯半径r的关系通过以下的式7来表示。
[0119]
aw=arctan(lh/r)
ꢀꢀꢀ
(式7)
[0120]
在这里,“arctan()”是正切函数的反函数(以下,相同)。
[0121]
上述的式6、式6a、式7是车辆10在速度v和转弯半径r未变化的状态下,在转弯时成立的关系式。具体而言,式6、式6a、式7表示由离心力引起的力f1b(图4)和由重力引起的力f2b相互平衡的静态的状态。式7能够作为表示车轮角aw与转弯半径r的关系的较好的近似式来利用。此外,在实际的车辆10的行为与图5的简化的行为之间,存在各种差异。例如,作用于车辆的实际的力动态地变化。通过考虑力的动态变化来控制车辆10,能够减小车辆10的控制下的预期的运动与车辆10的实际的运动之间的偏差。在本实施例中,控制装置100考虑作用于车体90的侧倾扭矩,来控制车辆10。以下,对侧倾扭矩进行说明。
[0122]
图6的(a)~图6的(c)是由车辆10的横摆角加速度引起的侧倾扭矩的说明图。图6
的(a)、图6的(c)是朝向前方df观察到的后轮12r、12l和重心90c的说明图。在这里,车辆10位于水平的地面gl上。图6的(a)表示直立状态(ar=零)。图6的(c)表示车体90向右方dr倾斜的状态(ar>零)。图6的(b)是朝向与车体上方dvu相反的方向观察到的车轮12f、12r、12l与重心90c的说明图。在图6的(b)中,为了参考,示出右方dr和左方dl。在侧倾角ar与零不同的情况下,这些方向dr、dl不垂直于车体上方dvu而倾斜。
[0123]
变量z(图6的(a)、图6的(c))是侧倾轴axl与车体90的重心90c之间的距离。在本实施例中,侧倾轴axl位于地面gl上。因此,距离z与直立状态(图6的(a))下的地面gl与重心90c之间的垂直上方du的距离相同。在直立状态下,将重心90c朝向垂直下方dd投影到地面gl上的情况下的投影点pcl位于侧倾轴axl上。垂直轴ux是通过投影点pcl且平行于垂直上方du的轴。车辆上轴vux是通过投影点pcl,且平行于车体上方dvu的轴。车辆上轴vux通过投影点pcl和重心90c。如图6的(c)所示,车辆上轴vux与垂直轴ux所成的角度是侧倾角ar。
[0124]
在图6的(b)中,示出自转中心rc。在本实施例中,后轮12r、12l不是转动轮,前轮12f是转动轮。行驶的车辆10的朝向(例如,前方df)以后轮12r、12l的附近为中心向右或左变化。在车轮12f、12r、12l相对于地面不打滑的情况下,自转中心rc可能位于后轮12r、12l之间的中心(具体而言,图5的后中心cb)。在车轮12f、12r、12l相对于地面打滑的情况下,自转中心rc可能偏离后中心cb。不管哪种情况,自转中心rc都位于后轮12r、12l之间的中心的附近。通常,在图6的(b)的俯视图中,车体90的重心90c接近车体90的中央部分。因此,车体90的重心90c配置于从自转中心rc向前方df侧远离的位置。图中的距离x是重心90c与自转中心rc之间的前方df的位置之差(距离)。
[0125]
变量ay”(图6的(b))是车辆10的横摆角加速度(变量ay相当于横摆角)。在本说明书中,标在变量后的一个引号
“’”
表示与时间相关的一阶微分。两个引号
“””
表示与时间相关的二阶微分。例如,ay”表示横摆角ay的与时间相关的二阶微分,即,横摆角加速度。
[0126]
在本实施例中,横摆角加速度ay”是围绕与车体上方dvu平行的轴的横摆角加速度。横摆角加速度ay”表示以自转中心rc为中心的车辆10的自转的角加速度。在这里,将垂直于地面的轴称为地面垂直轴。横摆角加速度ay”表示围绕地面垂直轴的横摆角加速度中的围绕与车体上方dvu平行的轴的成分。在图6的(b)的俯视图上,在横摆角加速度ay”的方向为顺时针方向的情况下,横摆角速度ay’以右转弯的程度增大的方式变化。以下,在俯视图上,在横摆角加速度ay”的方向为顺时针方向的情况下,将横摆角加速度ay”的方向称为右方。在俯视图上,在横摆角加速度ay”的方向为逆时针方向的情况下,横摆角加速度ay”的方向为左方。
[0127]
车体90的重心90c配置在从自转中心rc向前方df侧远离距离x的量的位置。因此,与横摆角加速度ay”的方向相反方向的惯性的力的成分f12作用于车体90(称为惯性力成分f12)。该惯性力成分f12的方向垂直于车体上方dvu。另外,在本实施例中,在图6的(b)的俯视图上,从自转中心rc朝向重心90c的方向与前方df大致平行。因此,惯性力成分f12的方向与前方df大致垂直。惯性力成分f12的大小用质量m与由横摆角加速度ay”引起的重心90c的加速度a90的积来表示。加速度a90用距离x与横摆角加速度ay”的积来表示。因此,通过计算式“m*x*ay
””
来计算惯性力成分f12的大小。在图6的(b)的俯视图中,横摆角加速度ay”的方向,即,横摆角速度ay’的变化方向是顺时针方向。在该情况下,惯性力成分f12的方向朝向左方dl侧。
[0128]
在图6的(c)中,示出惯性力成分f12。惯性力成分f12使车体90侧倾。由惯性力成分f12引起的侧倾扭矩tq1的大小通过对距离z乘以惯性力成分f12的大小来计算(tq1=z*f12=m*x*z*ay”)。侧倾扭矩tq1的方向(称为横摆角加速度侧倾方向)是右方或左方,且是与横摆角加速度ay”的方向相反的方向。例如,在横摆角加速度ay”的方向为右转弯的方向的情况下,侧倾扭矩tq1的方向为左方。
[0129]
在前轮12f转动的情况下,车轮角aw发生变化。在车轮角aw发生变化的情况下,由于横摆角速度ay’变化,所以横摆角加速度ay”的大小变得大于零。通过非零的横摆角加速度ay”,侧倾扭矩tq1作用于车体90。像这样,由于车轮角aw的变化(即,车轮角aw的角速度aw’),产生侧倾扭矩(以下,也称为第一种侧倾扭矩)。
[0130]
第一种侧倾扭矩的大小能够以如下的方式来确定。首先,对车轮角aw和横摆角加速度ay”的关系进行说明。如在图5中说明的那样,前中心cf、后中心cb以及公转中心cr形成直角三角形。在侧倾角ar为零的情况下,车体上方dvu与垂直下方dd平行。因此,图5所示的点cf、cb、cr的配置与朝向平行于车体上方dvu的方向观察点cf、cb、cr的情况下的配置相同。在这里,推断为前轮12f的行进方向d12与侧倾角ar无关,而与车轮角aw建立对应关系。因此,在朝向与车体上方dvu平行的方向观察点cf、cb、cr的情况下,与侧倾角ar无关地、前中心cf、后中心cb以及公转中心cr形成直角三角形。将该直角三角形的三个边中的连结公转中心cr和后中心cb的边的长度设为rx。在该情况下,式a1成立。
[0131]
(式a1)tan(aw)=lh/rx
[0132]
式a1变形为式a2。
[0133]
(式a2)1/rx=tan(aw)/lh
[0134]
在车辆10以横摆角速度ay’转弯的情况下,式a3成立。
[0135]
(式a3)v=rx*ay’[0136]
式a3变形为式a4。
[0137]
(式a4)ay’=v/rx
[0138]
通过将式a2代入式a4,导出式a5。
[0139]
(式a5)ay’=(v*tan(aw))/lh
[0140]
通过以时间对式a5的两边进行微分,导出式a6。
[0141]
(式a6)ay”=(v/lh)*(1/cos2(aw))*aw’[0142]
如在图6的(b)、图6的(c)中说明的那样,由于横摆角加速度ay”,侧倾扭矩作用于车体90。第一种侧倾扭矩是由式a6的横摆角加速度ay”引起的侧倾扭矩。第一种侧倾扭矩tqa的大小通过向图6的(c)的侧倾扭矩tq1的大小的计算式的横摆角加速度ay”代入式a6而导出,用式a7来表示。
[0143]
(式a7)tqa=m*x*z*ay”[0144]
=(m*x*z*v*aw’)/(lh*cos2(aw))
[0145]
如上所述,能够使用车轮角aw的角速度aw’,对车体90赋予第一种侧倾扭矩tqa。第一种侧倾扭矩tqa的方向(也称为转动侧倾方向)是与车轮角aw的角速度aw’的方向相反的方向。例如,在车轮角aw向右方dr转动的情况下(aw’>零),第一种侧倾扭矩tqa的方向是左方。
[0146]
此外,根据式a7导出式a8。
[0147]
(式a8)aw’=(tqa*lh*cos2(aw))/(m*x*z*v)
[0148]
式a8表示产生第一种侧倾扭矩tqa所需的车轮角aw的角速度aw’的大小。
[0149]
此外,转向操纵马达65能够通过产生转动扭矩,使车轮角aw,进而使其角速度aw’变化。如式a6所示,车轮角aw的角速度aw’使车辆10的横摆角加速度ay”变化。像这样,转动扭矩是使横摆角加速度ay”变化的力的例子。转向操纵马达65是构成为产生使横摆角加速度ay”变化的力的力产生装置的例子(也称为力产生装置65)。
[0150]
图7是表示与车辆10的控制相关的结构的框图。车辆10具有车速传感器122、输入角传感器123、车轮角传感器124、方向传感器126、加速踏板传感器145、制动踏板传感器146、控制装置100、右驱动马达51r、左驱动马达51l、倾斜马达25以及转向操纵马达65。
[0151]
车速传感器122是检测车辆10的车速的传感器。在本实施例中,车速传感器122安装于前叉17(图1的(a))的下端,检测前轮12f的旋转速度。旋转速度与车辆10的速度(也称为车速)具有相关性。因此,可以说检测旋转速度的传感器122检测车速。
[0152]
输入角传感器123是检测方向盘41a的朝向(即,输入角)的传感器。在本实施例中,输入角传感器123安装于方向盘41a(图1的(a))。输入角传感器123是构成为获取输入角ai(转弯输入信息的例子)的转弯输入信息获取装置的例子。
[0153]
车轮角传感器124是检测前轮12f的车轮角的传感器。在本实施例中,车轮角传感器124安装于主体部20的前壁部20a(图1的(a))。车轮角传感器124检测围绕转动轴ax1的车轮角(也称为检测角awx)。转动轴ax1与车体90一起侧倾。另外,与转动轴ax1平行的方向(也称为转动轴ax1的方向)可以与车体上方dvu不同。在该情况下,围绕与车体上方dvu平行的轴的车轮角aw通过使用转动轴ax1的方向与车体上方dvu之间的差修正检测角awx来计算。例如,在相对于车体上方dvu的后倾角ca不为零的情况下,也可以根据近似式“aw=cos(ca)*awx”,来计算车轮角aw。在相对于车体上方dvu的外倾角不为零的情况下,也相同。
[0154]
方向传感器126是确定侧倾角ar和横摆角速度的传感器。在本实施例中,方向传感器126固定于车体90(图1的(a))(具体而言,后壁部20c)。另外,在本实施例中,方向传感器126包含加速度传感器126a、陀螺仪传感器126g以及控制部126c。加速度传感器是检测任意方向的加速度的传感器,例如,是三轴加速度传感器。以下,将由加速度传感器126a检测的加速度的方向称为检测方向。在车辆10停止的状态下,检测方向与垂直下方dd相同。陀螺仪传感器126g是检测以任意方向的旋转轴为中心的角速度的传感器,例如,是三轴角速度传感器。控制部126c使用来自加速度传感器126a的信号、来自陀螺仪传感器126g的信号以及来自车速传感器122的信号,来确定侧倾角ar和横摆角速度。控制部126c例如是包含计算机的数据处理装置。
[0155]
控制部126c通过使用由车速传感器122确定的速度v,来计算车辆10的加速度。而且,控制部126c通过使用加速度,来确定由车辆10的加速度引起的检测方向相对于实际的垂直下方dd的偏差(例如,确定检测方向的前方df或后方db的偏差)。另外,控制部126c通过使用由陀螺仪传感器126g确定的角速度,来确定由车辆10的角速度引起的检测方向相对于实际的垂直下方dd的偏差(例如,确定检测方向的右方dr或左方dl的偏差)。控制部126c通过使用确定出的偏差来修正检测方向,来确定垂直下方dd。像这样,方向传感器126能够在车辆10的各种行驶状态下,确定适当的垂直下方dd。而且,控制部126c确定垂直下方dd的相反的垂直上方du,并计算垂直上方du与预先确定的车体上方dvu之间的侧倾角ar。另外,控
制部126c根据由陀螺仪传感器126g确定的角速度来确定以与车体上方dvu平行的轴为中心的角速度的成分,并计算确定出的角速度作为横摆角速度。
[0156]
加速踏板传感器145安装于加速踏板45(图1的(a)),检测加速操作量。制动踏板传感器146安装于制动踏板46(图1的(a)),检测制动操作量。
[0157]
各传感器122、123、124、145、146例如使用分解器或编码器来构成。
[0158]
控制装置100具有主控制部110、驱动装置控制部300、倾斜马达控制部400以及转向操纵马达控制部500。控制装置100使用来自蓄电池120(图1的(a))的电力而进行动作。在本实施例中,控制部110、300、400、500分别具有计算机。具体而言,控制部110、300、400、500具有处理器110p、300p、400p、500p(例如,cpu)、易失性存储装置110v、300v、400v、500v(例如,dram)、以及非易失性存储装置110n、300n、400n、500n(例如,闪存)。非易失性存储装置110n、300n、400n、500n中预先储存有用于对应的控制部110、300、400、500的动作的程序110g、300g、400g、500g。另外,主控制部110的非易失性存储装置110n中预先储存有地图数据mar、mcw。处理器110p、300p、400p、500p分别通过执行对应的程序110g、300g、400g、500g,来执行各种处理。
[0159]
主控制部110的处理器110p接收来自传感器122、123、124、126、145、146的信号。而且,处理器110p使用接收到的信号,对驱动装置控制部300、倾斜马达控制部400以及转向操纵马达控制部500输出指示。
[0160]
驱动装置控制部300的处理器300p根据来自主控制部110的指示,来控制驱动马达51l、51r。倾斜马达控制部400的处理器400p根据来自主控制部110的指示,来控制倾斜马达25。转向操纵马达控制部500的处理器500p根据来自主控制部110的指示,来控制转向操纵马达65。这些控制部300、400、500分别具有电力控制部300c、400c、500c,电力控制部300c、400c、500c对控制对象的马达51l、51r、25、65供给来自蓄电池120的电力。电力控制部300c、400c、500c使用电气电路(例如,逆变器电路)构成。此外,主控制部110中的执行用于控制转向操纵马达65的处理的部分和转向操纵马达控制部500的整体是构成为控制力产生装置65的力控制装置的例子(也称为力控制装置910)。
[0161]
a2.转向操纵马达的控制:
[0162]
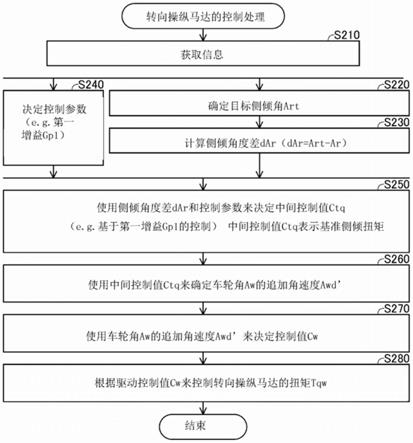
图8是表示转向操纵马达65的控制处理的例子的流程图。在本实施例中,控制转向操纵马达65,以通过车轮角aw的变化产生使侧倾角ar接近目标侧倾角的侧倾扭矩。以下,在流程图中,在各步骤中,赋予组合字母“s”和接着字母“s”的数字而成的附图标记。图8示出车辆10前进的情况下的处理。如后所述,在控制处理中,使用各种参数。此外,车体90的质量m、重力加速度g、距离x、距离z以及轴距lh分别能够通过实验来测定。在本实施例中,作为这些参数m、g、x、z、lh分别使用预先确定的值(也称为基准值m、g、x、z、lh)。此外,车体90的质量m相当于所谓的簧上质量(sprung mass)。
[0163]
在s210中,主控制部110(图7)的处理器110p从传感器122、123、124、126、145、146获取数据。然后,处理器110p确定当前的信息,具体而言,速度v、输入角ai、车轮角aw、侧倾角ar、横摆角速度ay’、加速操作量pa以及制动操作量pb。
[0164]
在s220中,处理器110p使用输入角ai,确定目标侧倾角art。输入角ai与目标侧倾角art的对应关系通过地图数据mar(图7)预先确定。处理器110p参照地图数据mar,来确定目标侧倾角art。在本实施例中,输入角ai的绝对值越大,目标侧倾角art的绝对值越大。另
外,目标侧倾角art的方向(右或左)与由输入角ai确定的转弯方向相同。在s230中,处理器110p通过从目标侧倾角art减去当前的侧倾角ar,来计算侧倾角度差dar。
[0165]
在s240中,处理器110p决定控制参数。在本实施例中,处理器110p决定用于比例控制的p增益gp1(也称为第一增益gp1)。此外,处理器110p并列地执行s220~s230和s240。然后,在s250中,处理器110p通过使用侧倾角度差dar和第一增益gp1的比例控制,来决定中间控制值ctq(例如,ctq=gp1*dar)。
[0166]
如后述那样,中间控制值ctq表示基准侧倾扭矩。零的中间控制值ctq表示零的侧倾扭矩。正的中间控制值ctq表示右方dr的侧倾扭矩。负的中间控制值ctq表示左方dl的侧倾扭矩。中间控制值ctq的绝对值越大,侧倾扭矩的绝对值越大。转向操纵马达65以因车轮角aw的角速度aw’而产生的第一种侧倾扭矩tqa接近基准侧倾扭矩的方式进行控制。此外,侧倾角度差dar的大小越大,中间控制值ctq(即,基准侧倾扭矩)的大小越大。另外,第一增益gp1越大,基准侧倾扭矩的大小越大。
[0167]
图9的(a)~图9的(c)是表示第一增益gp1的例子的图表。在图9的(a)中,横轴表示速度v,纵轴表示第一增益gp1。在速度v处于零以上且第一阈值v1以下的第一范围vr1内的情况下,速度v越小,第一增益gp1越小(第一阈值v1例如为时速1km以上且时速5km以下的范围的值)。而且,在v=零的情况下,gp1=零(即,ctq=零)。其理由如下。如后述那样,在本实施例中,以车轮角aw的角速度aw’接近根据上述的式a8计算的值的方式,来控制转向操纵马达65。如式a8所示,车轮角aw的角速度aw’的绝对值与速度v成反比。在角速度aw’严格遵循式a8的情况下,若速度v接近零,则角速度aw’的绝对值发散。在本实施例中,为了防止速度v较小的情况下的参数的发散,在速度v较小的情况下,第一增益gp1较小。由此,由于中间控制值ctq(即,基准侧倾扭矩)变小,所以可抑制角速度aw’的发散。
[0168]
在速度v为第二阈值v2以上的第二范围vr2下,速度v越大,第一增益gp1越小(第二阈值v2例如为时速30km以上且时速40km以下的范围内的值)。其理由如下。在对旋转的物体施加以与旋转轴垂直的轴为中心的外部扭矩的情况下,以与旋转轴和外部扭矩的轴垂直的轴为中心的扭矩作用于物体(也称为陀螺仪力矩)。而且,物体因陀螺仪力矩而旋转。这样的运动也被称为进动。例如,在车辆10(图1的(a))前进中,在车体90向右方dr倾斜的情况下,以旋转轴axw1为中心旋转的前轮12f也与车体90一起向右方dr倾斜。这样,以与旋转轴axw1垂直且与前方df平行的轴为中心的扭矩作用于前轮12f。在该情况下,以转动轴ax1为中心使行进方向d12向右方dr转动的扭矩作用于前轮12f(图1的(b))。然后,前轮12f向右方dr转动。前轮12f的角运动量越大,即,速度v越大,使前轮12f转动的扭矩越强。像这样,在速度v较大的情况下,车轮12f可以向车体90的倾斜方向自然地转动。在本实施例中,在速度v较大的情况下,为了允许前轮12f的自然的转动,第一增益gp1变小。如后述那样,在第一增益gp1较小的情况下,由于中间控制值ctq(即,基准侧倾扭矩)的大小较小,所以转向操纵马达65的转动扭矩的大小也变小。由此,允许前轮12f的自然的转动。
[0169]
此外,当速度v恒定时,第一增益gp1可以根据输入角ai的角速度ai’和角加速度ai”而变化。图9的(b)是速度v恒定的情况下的图表,横轴表示输入角ai的角速度ai’的绝对值,纵轴表示第一增益gp1。如图示那样,角速度ai’的绝对值越大,第一增益gp1越大。图9的(c)是速度v恒定的情况下的图表,横轴表示输入角ai的角加速度ai”的绝对值,纵轴表示第一增益gp1。如图示那样,角加速度ai”的绝对值越大,第一增益gp1越大。它们的理由如下。
驾驶员为了使车辆10的行进方向迅速变化,而迅速旋转方向盘41a。因此,在角速度ai’的绝对值较大的情况下和角加速度ai”的绝对值较大的情况下,需要侧倾角ar的快速变化。因此,在本实施例中,为了增大中间控制值ctq(即,基准侧倾扭矩)的绝对值,角速度ai’的绝对值越大,第一增益gp1越大,角加速度ai”的绝对值越大,第一增益gp1越大。此外,为了抑制中间控制值ctq的过度增大,处理器110p将第一增益gp1的上限限制为第二上限值lm2。
[0170]
此外,第一增益gp1与其它参数的对应关系也可以代替图9的(a)~图9的(c)所示的对应关系,为其它各种对应关系。例如,在第二范围vr2(图9的(a))中,在速度v增大的情况下,第一增益gp1也可以不减少而维持,也可以增大。另外,第一阈值v1以上的速度v的范围可以划分为低速范围、中速范围、高速范围这三个范围。而且,低速范围的第一增益gp1和高速范围的第一增益gp1也可以设定为大于中速范围的第一增益gp1的值。在陀螺仪力矩较小的情况下,低速范围的较大的第一增益gp1能够辅助前轮12f的向转弯方向的转动。另外,在速度v较大的情况下,由于前轮12f的旋转速度较大,所以前轮12f的角运动量也较大。在该情况下,为了使前轮12f向转弯方向转动,可能需要较大的扭矩。高速范围的较大的第一增益gp1能够辅助前轮12f的向转弯方向的转动。
[0171]
图9的(d)是表示侧倾角度差dar与中间控制值ctq的关系的例子的图表。横轴表示侧倾角度差dar的绝对值,纵轴表示中间控制值ctq的绝对值。该图表示出速度v恒定的情况。如图示那样,侧倾角度差dar的绝对值越大,中间控制值ctq的绝对值越大。在侧倾角度差dar的绝对值恒定的情况下,输入角ai的角速度ai’的绝对值越大,中间控制值ctq的绝对值越大。另外,输入角ai的角加速度ai”的绝对值越大,中间控制值ctq的绝对值越大。
[0172]
在s260(图8)中,处理器110p使用中间控制值ctq,来确定车轮角aw的角速度(也称为追加角速度awd’)。追加角速度awd’表示通过对车轮角aw的当前的角速度aw’追加追加角速度awd’,而产生与中间控制值ctq建立有对应关系的基准侧倾扭矩的角速度。这样的追加角速度awd’与中间控制值ctq的关系通过上述的式a8来表示。在式a8中,代替第一种侧倾扭矩tqa而使用中间控制值ctq,角速度aw’表示追加角速度awd’。处理器110p使用基准值lh、m、x、z、中间控制值ctq、车轮角aw以及速度v,来计算追加角速度awd’。
[0173]
图9的(e)~图9的(g)是表示追加角速度awd’的例子的图表。在图9的(e)中,横轴表示中间控制值ctq的绝对值,纵轴表示追加角速度awd’的绝对值。如图示那样,ctq的绝对值越大,awd’的绝对值越大。另外,在中间控制值ctq恒定的情况下,追加角速度awd’可能根据速度v和车轮角aw而变化。此外,在本实施例中,处理器110p将awd’的绝对值的上限限制为第一上限值lm1。在图9的(f)中,横轴表示速度v,纵轴表示追加角速度awd’的绝对值。速度v越大,awd’的绝对值越小。如上述的式a8所示,在本实施例中,awd’的绝对值与v成反比。为了防止速度v较小的情况下的追加角速度awd’的发散,awd’的绝对值的上限被限制为第一上限值lm1。在图9的(g)中,横轴表示车轮角aw的绝对值,纵轴表示追加角速度awd’的绝对值。车轮角aw的绝对值越大,awd’的绝对值越小。如上述的式a8所示,在本实施例中,在aw的绝对值增大的情况下,awd’的绝对值按照cos2(aw)而变小。
[0174]
在s270(图8)中,处理器110p使用追加角速度awd’,来决定驱动控制值cw(也仅称为控制值cw)。控制值cw表示应由转向操纵马达65产生的转动扭矩。在本实施例中,控制值cw表示应向转向操纵马达65供给的电流的方向和大小。控制值cw的绝对值表示电流的大小(即,转动扭矩的大小)。控制值cw的正负的符号表示电流的方向(即,转动扭矩的方向)(例
如,正表示右方,负表示左方)。追加角速度awd’与控制值cw的对应关系由地图数据mcw(图7)预先确定。追加角速度awd’的绝对值越大,控制值cw的绝对值越大。另外,控制值cw的正负的符号(即,转动扭矩的方向)与追加角速度awd’的方向相同。处理器110p参照地图数据mcw,确定与追加角速度awd’建立有对应关系的驱动控制值cw。
[0175]
在s280中,处理器110p将表示驱动控制值cw的数据供给至转向操纵马达控制部500。转向操纵马达控制部500的处理器500p根据驱动控制值cw来控制向转向操纵马达65供给的电力。具体而言,处理器500p将表示驱动控制值cw的数据供给至电力控制部500c。电力控制部500c根据驱动控制值cw,来控制向转向操纵马达65供给的电力。转向操纵马达65根据供给的电力来输出转动扭矩。然后,图8的处理结束。控制装置100反复执行图8的处理。由此,控制装置100继续控制转向操纵马达65以输出适合车辆10的状态的转动扭矩。
[0176]
如上所述,驱动控制值cw表示与追加角速度awd’建立有对应关系的转动扭矩(s270)。根据式a8与追加角速度awd’建立有对应关系的参数tqa表示因追加角速度awd’而产生的第一种侧倾扭矩tqa。在s260中,为了根据式a8来计算追加角速度awd’,作为表示第一种侧倾扭矩的参数tqa,使用中间控制值ctq。因此,中间控制值ctq表示第一种侧倾扭矩。在s250中,中间控制值ctq通过使用侧倾角度差dar和控制参数(在这里,为p增益gp1)的比例控制来决定。在本实施例中,侧倾角度差dar的大小越大,中间控制值ctq的大小(即,第一种侧倾扭矩的大小)越大。另外,中间控制值ctq的正负的符号(即,第一种侧倾扭矩的方向)与侧倾角度差dar的正负的符号(即,从侧倾角ar朝向目标侧倾角art的侧倾方向)相同(以下,将从侧倾角ar朝向目标侧倾角art的侧倾方向也称为“侧倾角度差dar的方向”)。这样,侧倾角度差dar表示因追加角速度awd’而产生的第一种侧倾扭矩的基准亦即基准侧倾扭矩。侧倾角度差dar的大小表示基准侧倾扭矩的大小亦即基准大小。侧倾角度差dar的正负的符号表示基准侧倾扭矩的方向亦即基准方向。侧倾角度差dar是表示应作用于车体90的第一种侧倾扭矩的方向的基准亦即基准方向和大小的基准亦即基准大小的基准信息的例子(以下,将侧倾角度差dar也称为基准信息dar)。控制装置100根据使用基准信息dar来决定的驱动控制值cw来控制转向操纵马达65。由此,转向操纵马达65以第一种侧倾扭矩的方向与基准方向相同,基准大小越大第一种侧倾扭矩的大小越大的方式,来产生转动扭矩。在根据驱动控制值cw来控制转向操纵马达65的情况下,由于侧倾角ar接近目标侧倾角art,所以车辆10能够以适合输入角ai的侧倾角ar(即,目标侧倾角art)来行驶。
[0177]
图10的(a)~图10的(c)是表示通过图8的处理控制的转动扭矩tqw的例子的图表。在图10的(a)中,横轴表示驱动控制值cw的绝对值,纵轴表示转动扭矩tqw的绝对值。驱动控制值cw的绝对值越大,转动扭矩tqw的绝对值越大。此外,在本实施例中,在图8的s280中,在驱动控制值cw的绝对值为预先确定的上限值cwm以上的情况下,处理器110p将驱动控制值cw的绝对值修正为上限值cwm。因此,转动扭矩tqw的绝对值的上限被限制为与上限值cwm建立有对应关系的上限值lm3。其结果是,抑制车轮角aw的突然的变化。
[0178]
在图10的(b)中,横轴表示侧倾角度差dar,纵轴表示转动扭矩tqw。在原点o,dar=零、tqw=零。在这里,假设速度v、输入角ai、车轮角aw、横摆角速度ay’分别为恒定。这样的状态能够通过将车辆10载置在能够使车辆10以与垂直上方du平行的轴为中心旋转的转盘上来再现。转盘的旋转的角速度表示围绕与垂直上方du平行的轴的横摆角速度。围绕与车体上方dvu平行的轴的横摆角速度ay’能够使用来自方向传感器126的数据来确定。转盘的
旋转的角速度越大,该横摆角速度ay’的大小越大。转盘具有使车轮12f、12r、12l分别以与速度v相应的旋转速度旋转的多个辊。为了将车轮角aw保持恒定,前叉17被固定于车体90。转动扭矩tqw能够使用向转向操纵马达65供给的电流来确定。
[0179]
侧倾角度差dar的绝对值越大,在s250(图8)中决定的中间控制值ctq的绝对值越大。因此,侧倾角度差dar的绝对值越大,转动扭矩tqw的绝对值也越大(其中,转动扭矩tqw的绝对值的上限被限制为上限值lm3)。
[0180]
另外,正值的侧倾角度差dar表示从侧倾角ar朝向目标侧倾角art的基准侧倾方向为右方。根据图6的(b)、图6的(c)能够理解:在使前轮12f的方向d12向右方dr转动的情况下,第一种侧倾扭矩tqa的方向为左方dl。因此,为了产生右方dr的第一种侧倾扭矩tqa,产生使前轮12f的方向d12向左方dl转动的负值的转动扭矩tqw。相反,在侧倾角度差dar为负值的情况下,产生正值的转动扭矩tqw。
[0181]
在图10的(c)中,横轴表示车轮角aw的绝对值,纵轴表示转动扭矩tqw的绝对值。该图表示出将速度v和基准信息dar(即,基准方向和基准大小)分别保持恒定的条件(称为第一条件)下的特性(dar的绝对值大于零)。为了确定车轮角aw与转动扭矩tqw的关系,其它参数(例如,ai、ar、ay’)也为恒定。另外,车轮角aw是可变的。为了实现这样的状态,将车辆10载置在上述的转盘上。在这里,支承前轮12f的辊构成为能够根据前轮12f的转动向相同的方向转动。在转向操纵马达65产生转动扭矩的情况下,支承前轮12f的辊与前轮12f一起向转动扭矩的方向转动。
[0182]
如图示那样,即使基准信息dar恒定,转动扭矩tqw的绝对值也根据车轮角aw的绝对值增大而减少。其理由是因为如上述的式a8所示,车轮角aw的角速度aw’(即,转动扭矩tqw)按照cos2(aw)变小。这样,由于根据式a8来控制转动扭矩tqw,所以控制装置100能够使由角速度aw’引起的第一种侧倾扭矩接近基准侧倾扭矩。
[0183]
如上所述,控制装置100通过执行图8的处理,以侧倾角ar接近目标侧倾角art的方式,来控制转向操纵马达65。其结果是,车辆10能够以适合输入角ai的侧倾角ar来行驶。例如,在侧倾角度差dar的大小较大,且从当前的侧倾角ar朝向目标侧倾角art的侧倾方向为右的情况下(即,侧倾角度差dar的方向为右),转向操纵马达65使前轮12f向与侧倾角度差dar的方向相反的左方转动。由此,侧倾角ar迅速地接近目标侧倾角art。之后,转向操纵马达65以将侧倾角ar维持为侧倾角度差dar的方式,通过同样的控制来输出转动扭矩。由此,车轮角aw可以接近适合侧倾角ar的角度(图4、图5)。在侧倾角度差dar的大小较小的情况下,转动扭矩的大小也变小。如上所述,前轮12f可以通过陀螺仪力矩,向车体90的侧倾方向自然地转动。因此,车辆10能够进行适合输入角ai的转弯。例如,车辆10能够进行适合图4、图5所示的转弯。
[0184]
另外,如在图6的(b)、图6的(c)中说明的那样,使用车轮角aw的角速度aw’获得的第一种侧倾扭矩tqa利用与横摆角加速度ay”的方向相反方向的惯性的力f12来产生。因此,与车体90通过由倾斜马达25直接产生的侧倾扭矩侧倾的情况相比,在车体90通过第一种侧倾扭矩tqa侧倾的情况下,可抑制驾驶员感觉到的横向加速度。
[0185]
a3.倾斜马达的控制:
[0186]
图11是表示倾斜马达25的控制处理的例子的流程图。在本实施例中,控制倾斜马达25以产生使侧倾角ar接近目标的侧倾角的侧倾扭矩。在s510中,主控制部110(图7)的处
理器110p从传感器123、126获取信号。而且,处理器110p确定当前的信息,具体而言,输入角ai和侧倾角ar。
[0187]
s520、s530与图8的s220、s230分别相同。在s540中,处理器110p使用侧倾角度差dar来决定控制值cwl。在本实施例中,处理器110p通过使用侧倾角度差dar的比例控制,来决定控制值cwl。在s550中,处理器110p将表示控制值cwl的数据供给至倾斜马达控制部400。倾斜马达控制部400的处理器400p根据控制值cwl,来控制向倾斜马达25供给的电力。具体而言,处理器400p将表示控制值cwl的数据供给至电力控制部400c。电力控制部400c根据控制值cwl,来控制向倾斜马达25供给的电力。倾斜马达25根据供给的电力,来输出侧倾扭矩。然后,图11的处理结束。控制装置100反复执行图11的处理。由此,控制装置100继续控制倾斜马达25以输出适合车辆10的状态的侧倾扭矩。
[0188]
如上所述,控制装置100控制倾斜马达25和转向操纵马达65中的每一个,以产生使侧倾角ar接近目标侧倾角art的侧倾扭矩。其结果是,车辆10能够以适合输入角ai的侧倾角ar行驶。而且,车辆10能够进行适合输入角ai的转弯。
[0189]
此外,虽然省略图示,但主控制部110(图7)和驱动装置控制部300作为控制驱动马达51r、51l的驱动控制装置900发挥作用。驱动控制装置900控制驱动马达51r、51l,以进行适合加速操作量pa的加速和适合制动操作量pb的减速。
[0190]
b.第二实施例:
[0191]
图12是第二实施例的车辆的立体图。在本实施例中,车辆10a是具有两个前轮fra、fla和两个后轮rra、rla的四轮车。两个前轮fra、fla是转动轮,能够在车辆10a的宽度方向上转动。两个后轮rra、rla是驱动轮。车辆10a还具有车体90a、悬架frs、fls、rrs、rls、转向操纵装置42、方向盘42a、驱动马达51a以及控制装置100a。车轮fra、fla、rra、rla分别通过悬架frs、fls、rrs、rls连结到车体90a。悬架frs、fls、rrs、rls也可以是双横臂悬架、扭力梁悬架等各种悬架。后轮rra、rla连接有驱动马达51a。后轮rra、rla通过驱动马达51a的动力而旋转。前轮fra、fla连接有转向操纵装置42。转向操纵装置42的结构也可以是齿条和小齿轮型等各种结构。转向操纵装置42连接有方向盘42a。驾驶员通过使方向盘42a旋转,能够使前轮fra、fla的行进方向向右或左转动。转向操纵装置42具有转向操纵马达65a。转向操纵马达65a产生辅助转向操纵的扭矩。控制装置100a是控制转向操纵马达65a和驱动马达51a的装置。距离lh是所谓的轴距。在本实施例中,侧倾轴axl也位于地面上的车体90a的宽度方向的中心位置。由于前轮fra、fla是转动轮,后轮rra、rla不是转动轮,所以自转中心rac位于后轮rra、rla之间的中心位置的附近。车体90a的重心90ac位于比自转中心rac靠前方df侧。距离x是自转中心rac与车体90a的重心90ac之间的前方df的距离。距离z是侧倾轴axl与重心90ac之间的距离。距离z与距离重心90ac的地面的高度相同。
[0192]
车辆10a作为与控制相关的结构,具有对图7的结构进行以下的变更所得的结构所得的结构。
[0193]
1)驱动装置控制部300控制驱动马达51a。
[0194]
2)转向操纵马达控制部500代替转向操纵马达65,而控制转向操纵马达65a。
[0195]
3)省略倾斜马达控制部400和倾斜马达25。
[0196]
图13是表示转向操纵马达65a的控制处理的例子的流程图。在本实施例中,控制装置100a控制转向操纵马达65,以通过车轮角aw的变化产生减小侧倾角ar的角加速度ar”(称
为侧倾角加速度ar”)的侧倾扭矩。在本实施例中,作为车体90a的质量m、重力加速度g、距离x、距离z以及轴距lh中的每一个,使用预先确定的值。车轮角aw是以车辆10a的前方df为基准的前轮的方向(例如,右前轮fra或左前轮fla的方向)的角度。
[0197]
在s210中,主控制部110(图7)的处理器110p从传感器122、123、124、126、145、146获取数据。然后,处理器110p确定当前的信息,具体而言,速度v、输入角ai、车轮角aw、侧倾角ar、横摆角速度ay’、加速操作量pa以及制动操作量pb。
[0198]
在s220a中,处理器110p计算侧倾角ar的角加速度ar”。首先,处理器110p使用侧倾角ar来计算角速度ar’。角速度ar’的计算方法(更一般而言,是参数的微分值的计算方法)也可以是各种方法。在本实施例中,处理器110p从当前的侧倾角ar减去距现在预先确定的时间差的过去时刻的侧倾角ar来计算差分。而且,处理器110p采用通过差分除以时间差所得的值来作为角速度ar’。处理器110p使用角速度ar’,通过相同的方法,来计算角速度ar’的微分值亦即角加速度ar”。
[0199]
在s230a中,处理器110p确定用于减小侧倾角加速度ar”的目标侧倾扭矩tqt。在侧倾角加速度是ar”的情况下,以下的式b1是作用于车体90a的侧倾扭矩tqr的计算式。
[0200]
(式b1)tqr=(i m*z2)*ar”[0201]
侧倾扭矩tqr由“i*ar
””
和“m*z2*ar
””
这两个成分近似。变量i是旋转轴通过重心90c的情况下的车体90的惯性力矩(在这里,旋转轴与侧倾轴axl平行)。“m*z
2”是旋转轴与重心90c分离距离z的情况下的追加的项。系数“i m*z
2”通过以实验测定侧倾扭矩tqr与侧倾角加速度ar”的比率来预先决定。在车体90a的侧倾角加速度是ar”的情况下,处理器110p通过上述的式b1来计算作用于车体90a的侧倾扭矩tqr。而且,处理器110p采用反转侧倾扭矩tqr的方向而获得的侧倾扭矩,作为目标侧倾扭矩tqt。
[0202]
图14的(a)是表示侧倾角加速度ar”与目标侧倾扭矩tqt的关系的例子的图表。横轴表示侧倾角加速度ar”,纵轴表示目标侧倾扭矩tqt。在原点o,ar”=零、tqt=零。如图示所示,侧倾角加速度ar”的绝对值越大,目标侧倾扭矩tqt的绝对值越大。另外,目标侧倾扭矩tqt的方向(即,正负的符号)与侧倾角加速度ar”的方向(即,正负的符号)相反。
[0203]
在s235a(图13)中,处理器110p确定产生目标侧倾扭矩tqt所需的车轮角aw的角速度(称为追加角速度awd’)。追加角速度awd’通过向上述的式a8的第一种侧倾扭矩tqa代入目标侧倾扭矩tqt来计算。
[0204]
图14的(b)~图14的(d)是表示追加角速度awd’的例子的图表。在图14的(b)中,横轴表示目标侧倾扭矩tqt的绝对值,纵轴表示追加角速度awd’的绝对值。如图示那样,tqt的绝对值越大,awd’的绝对值越大。另外,在目标侧倾扭矩tqt恒定的情况下,追加角速度awd’可以根据速度v和车轮角aw而变化。此外,在本实施例中,处理器110p将awd’的绝对值的上限限制为第四上限值lm4。在图14的(c)中,横轴表示速度v,纵轴表示追加角速度awd’的绝对值。速度v越大,awd’的绝对值越小。如上述的式a8所示,在本实施例中,awd’的绝对值与v成反比。为了防止速度v较小的情况下的追加角速度awd’的发散,将awd’的绝对值的上限限制为第五上限值lm5。在图14的(d)中,横轴表示车轮角aw的绝对值,纵轴表示追加角速度awd’的绝对值。车轮角aw的绝对值越大,awd’的绝对值越小。如上述的式a8所示,在本实施例中,在aw的绝对值增大的情况下,awd’的绝对值按照cos2(aw)变小。
[0205]
在s240a(图13)中,处理器110p决定控制参数。在本实施例中,处理器110p决定用
于比例控制的p增益gp2(也称为第二增益gp2)。此外,处理器110p并列地执行s220a~s235a和s240a。而且,在s270a中,处理器110p通过使用追加角速度awd’和第二增益gp2的比例控制,来决定控制值cw2(例如,cw2=awd’*gp2)。此外,在本实施例中,将第二增益gp2决定为预先确定的值。代替于此,第二增益gp2也可以是根据其它参数变化的可变值。
[0206]
在s280a中,处理器110p将表示控制值cw2的数据供给至转向操纵马达控制部500。转向操纵马达控制部500的处理器500p根据控制值cw2,来控制向转向操纵马达65a供给的电力。具体而言,处理器500p将表示控制值cw2的数据供给至电力控制部500c。电力控制部500c根据控制值cw2,来控制向转向操纵马达65a供给的电力。转向操纵马达65a根据供给的电力,来输出转动扭矩。然后,图13的处理结束。控制装置100a反复执行图13的处理。由此,控制装置100a继续控制转向操纵马达65a,以输出抑制侧倾角加速度ar”的转动扭矩。在车辆10a在崎岖不平的道路上行驶的情况下,抑制车体90a的横揺(即,侧倾振动)。
[0207]
如上所述,控制值cw2表示与追加角速度awd’建立有对应关系的转动扭矩(s270a)。根据式a8与追加角速度awd’建立有对应关系的参数tqa表示因追加角速度awd’而产生的第一种侧倾扭矩tqa。在s235a中,为了根据式a8来计算追加角速度awd’,作为表示第一种侧倾扭矩的参数tqa,使用目标侧倾扭矩tqt。因此,目标侧倾扭矩tqt表示第一种侧倾扭矩的目标扭矩。在s230a中,作为目标侧倾扭矩tqt,使用反转在侧倾角加速度为ar”的情况下作用于车体90a的侧倾扭矩tqr的方向而获得的侧倾扭矩。如上述的式b1所示,侧倾角加速度ar”的大小越大,目标侧倾扭矩tqt的大小(即,侧倾扭矩tqr的大小)越大。另外,目标侧倾扭矩tqt的方向(即,与侧倾扭矩tqr的方向相反的方向)是与侧倾角加速度ar”的方向相反的方向。这样,侧倾角加速度ar”表示因追加角速度awd’而产生的第一种侧倾扭矩的基准亦即基准侧倾扭矩。侧倾角加速度ar”的大小表示基准侧倾扭矩的大小亦即基准大小。与侧倾角加速度ar”的方向相反的方向表示基准侧倾扭矩的方向亦即基准方向。侧倾角加速度ar”是表示应作用于车体90a的第一种侧倾扭矩的方向的基准亦即基准方向和大小的基准亦即基准大小的基准信息的例子(以下,将侧倾角加速度ar”也称为基准信息ar”)。控制装置100a根据使用基准信息ar”决定的控制值cw2来控制转向操纵马达65a。由此,转向操纵马达65a以第一种侧倾扭矩的方向与基准方向相同,且基准大小越大第一种侧倾扭矩的大小越大的方式,来产生转动扭矩。在根据控制值cw2来控制转向操纵马达65a的情况下,由于侧倾角加速度ar”的增大被抑制,所以侧倾角ar的变化被抑制。
[0208]
图14的(e)~图14的(g)是表示通过图13的处理控制的转动扭矩tqw的例子的图表。在图14的(e)中,横轴表示控制值cw2的绝对值,纵轴表示转动扭矩tqw的绝对值。控制值cw2的绝对值越大,转动扭矩tqw的绝对值越大。此外,在本实施例中,在图13的s280a中,在控制值cw2的绝对值为预先确定的上限值cwm2以上的情况下,处理器110p将控制值cw2的绝对值修正为上限值cwm2。因此,转动扭矩tqw的绝对值的上限被限制为与上限值cwm2建立有对应关系的上限值lm6。其结果是,抑制车轮角aw的突然的变化。
[0209]
在图14的(f)中,横轴表示侧倾角加速度ar”,纵轴表示转动扭矩tqw。在原点o,ar”=零、tqw=零。在这里,速度v、输入角ai、车轮角aw、横摆角速度ay’分别恒定。这样的状态与图10的(b)的状态相同,能够通过将车辆10a载置在转盘上来再现。侧倾角加速度ar”的绝对值越大,在s230a(图13)中决定的目标侧倾扭矩tqt的绝对值越大。因此,侧倾角加速度ar”的绝对值越大,转动扭矩tqw的绝对值也越大(其中,转动扭矩tqw的绝对值的上限被限
制为上限值lm6)。
[0210]
另外,正值的侧倾角加速度ar”表示基准侧倾方向为与侧倾角加速度ar”的方向亦即右方相反的左方。根据图6的(b)、图6的(c)能够理解,在使前轮fra、fla的方向向右方dr转动的情况下,第一种侧倾扭矩tqa的方向为左方dl。因此,为了产生左方dl的第一种侧倾扭矩tqa,而产生使前轮fra、fla的方向向右方dr转动的正值的转动扭矩tqw。相反,在侧倾角加速度ar”为负值的情况下,产生负值的转动扭矩tqw。
[0211]
在图14的(g)中,横轴表示车轮角aw的绝对值,纵轴表示转动扭矩tqw的绝对值。该图表示出将速度v和侧倾角加速度ar”(即,基准方向和基准大小)分别保持为恒定的条件(称为第一条件)下的特性(侧倾角加速度ar”的绝对值大于零)。为了确定车轮角aw与转动扭矩tqw的关系,其它参数(例如,ai、ay’)也为恒定。另外,车轮角aw是可变的。为了实现这样的状态,将车辆10a载置在在图10的(c)中说明的转盘上。
[0212]
如图示那样,即使侧倾角加速度ar”是恒定的,转动扭矩tqw的绝对值也根据车轮角aw的绝对值增大而减少。其理由是因为如上述的式a8所示,车轮角aw的角速度aw’(即,转动扭矩tqw)按照cos2(aw)而变小。像这样,由于根据式a8来控制转动扭矩tqw,所以控制装置100a能够使由角速度aw’引起的第一种侧倾扭矩接近基准侧倾扭矩。
[0213]
如上所述,控制装置100a通过执行图13的处理,以侧倾角加速度ar”变小的方式,来控制转向操纵马达65a。其结果是,可抑制车体90a的横揺(即,侧倾振动)。另外,如在图6的(b)、图6的(c)中说明的那样,使用车轮角aw的角速度aw’获得的第一种侧倾扭矩tqa利用与横摆角加速度ay”的方向相反方向的惯性的力f12来产生。因此,在将第一种侧倾扭矩tqa赋予给车体90a的情况下,可抑制驾驶员感觉到的横向加速度。
[0214]
c.第三实施例:
[0215]
在上述的实施例中,前轮12f、fra、fla是转动轮。代替于此,也可以后轮是转动轮。图15的(a)、图15的(b)是后轮为转动轮的情况下的侧倾扭矩tq1、tqa的说明图。图15的(a)、图15的(b)是与图6的(b)、图6的(c)相同的说明图。本实施例的车辆10b具有两个前轮(右前轮fr和左前轮fl)以及一个后轮rr。在车辆10b向右方dr转弯的情况下,后轮rr向左方dl转动。
[0216]
在图15的(a)中,示出自转中心rbc。在本实施例中,前轮fr、fl不是转动轮,而后轮rr是转动轮。因此,自转中心rbc位于前轮fr、fl之间的中心的附近。车体的重心90bc配置在从自转中心rbc向后方db侧远离的位置。图中的距离x是重心90bc与自转中心rbc之间的前方df的距离。
[0217]
车体的重心90bc配置在从自转中心rbc向后方db侧远离距离x的量的位置。因此,与横摆角加速度ay”的方向相同的方向的惯性力成分f12作用于车体。惯性力成分f12的方向垂直于车体上方dvu。另外,在本实施例中,在图15的(a)的俯视图上,从自转中心rbc朝向重心90bc的方向与后方db几乎平行。因此,惯性力成分f12的方向与后方db几乎垂直。在图15的(a)的俯视图中,横摆角加速度ay”的方向,即,横摆角速度ay’的变化方向为顺时针方向。在该情况下,惯性力成分f12的方向朝向右方dr侧。惯性力成分f12的大小的计算式与图6的(b)的计算式相同。
[0218]
在图15的(b)中,示出惯性力成分f12。与图6的(b)、图6的(c)的差异仅在惯性力成分f12的方向(即,侧倾扭矩tq1的方向)相反的点。
[0234]
6)输入角ai的角加速度ai”[0235]
在这些参数的大小较大的情况下,由于车体的侧倾较快,所以这些参数适用于控制值的决定。此外,如上所述,在速度v较大的情况下,转动轮能够通过陀螺仪力矩向侧倾方向转动。因此,优选在速度v较小的情况下,增益较大。
[0236]
如上所述,通过陀螺仪力矩,转动扭矩作用于旋转的车轮。处理器110p也可以使用该转动扭矩,来修正转向操纵马达65、65a的转动扭矩tqw。由陀螺仪力矩引起的转动扭矩例如可以使用速度v和侧倾角ar来计算。
[0237]
另外,在车轮向右或左倾斜的情况下,所谓的外倾推力作用于车轮。而且,由于外倾推力,转动扭矩作用于车轮。处理器110p也可以使用该转动扭矩来修正转向操纵马达65、65a的转动扭矩tqw。由外倾推力引起的转动扭矩例如可以使用速度v和侧倾角ar来计算。
[0238]
(3)根据追加角速度awd’确定转动扭矩的方法也可以代替图8、图13的方法,是其它各种方法。例如,处理器110p也可以通过对追加角速度awd’进行积分,来确定目标车轮角。而且,处理器110p也可以控制转向操纵马达65,以使当前的车轮角aw接近目标车轮角。
[0239]
(4)限制转动扭矩的上限的方法也可以是各种方法。例如,在图9的(f)的例子中,在速度v为阈值vl以下的情况下,将追加角速度awd’的绝对值限制为第一上限值lm1。代替于此,在速度v为阈值vl以下的情况下,处理器110p也可以作为速度v为阈值vl,来控制转向操纵马达65、65a。
[0240]
(5)目标侧倾角art(图8:s220)也可以除了输入角ai以外,还使用其它信息(例如,速度v)来确定。
[0241]
(6)作为车体的质量m,也可以代替预先决定的值,而使用测定值。车辆10(图1的(a))也可以具备测定车体90的质量m的传感器。这样的传感器例如也可以是检测右悬架70r(图2)的行程位置的传感器。车体90的质量m越大,右悬架70r的全长越短。因此,行程位置是与质量m具有相关性的参数。处理器110p也可以根据行程位置来确定全长,并根据确定出的全长来推断质量m。
[0242]
(7)作为车体的重心的位置,也可以代替预先确定的位置,来使用测定出的位置。例如,车辆10(图1的(a))也可以具备测定前叉17的行程位置的前传感器和检测右悬架70r(图2)的行程位置的后传感器。在重心位于前方df侧的情况下,由于对前叉17施加较大的载荷,所以前叉17的全长变短。在重心位于后方db侧的情况下,由于对右悬架70r施加较大的载荷,所以右悬架70r的全长变短。处理器110p能够通过使用前叉17的全长和右悬架70r的全长,来推断重心的前方df的位置。处理器110p能够使用推断出的重心的位置,来计算自转中心和重心的距离x(图6的(e))等)。作为自转中心,也可以使用预先确定的位置。
[0243]
另外,处理器110p也可以使车体向左右振动,来推断重心的距离z。例如,处理器110p使倾斜马达25输出使车体侧倾的扭矩。在距离z较短的情况下,侧倾角ar迅速地变化。在距离z较长的情况下,侧倾角ar缓慢地变化。这样,通过一定的扭矩产生的侧倾角ar的角速度ar’或角加速度ar”越大,能够推断为距离z越短。
[0244]
(8)表示用于控制的参数(例如,速度v等物理量)的数据也可以是与参数具有相关性的各种数据。例如,车速传感器122输出表示前轮12f的旋转速度的数据作为表示速度v的数据。
[0245]
(9)方向传感器126(图1的(a))也可以输出表示以与垂直上方du(图6(d))平行的
轴为中心的横摆角速度的数据。在该情况下,处理器110p能够使用侧倾角ar对以垂直上方du为基准的横摆角速度的大小与以车体上方dvu为基准的横摆角速度ay’的大小之间的偏差进行修正。另外,方向传感器126也可以代替横摆角速度,输出表示横摆角加速度的数据。在该情况下,处理器110p通过对横摆角加速度进行积分,来确定横摆角速度。
[0246]
(10)规定速度v、输入角ai等一个以上的控制参数与控制值cw、cw2(即,转动扭矩)的对应关系的方法也可以代替进行上述的运算的方法,是其它任意的方法。例如,也可以预先准备规定一个以上的控制参数与控制值cw、cw2的对应关系的地图数据。处理器110p也可以参照该地图数据,来确定控制值cw、cw2。
[0247]
(11)基准信息也可以代替侧倾角度差dar和侧倾角加速度ar”,是表示应作用于车体的第一种侧倾扭矩的方向的基准亦即基准方向和大小的基准亦即基准大小的各种信息。
[0248]
另外,基准信息的特定方法也可以是各种方法。例如,车辆也可以具备自动驾驶车辆的自动驾驶控制装置(例如,计算机)。自动驾驶控制装置也可以根据预先确定的行驶路径上的车辆的当前的位置,来确定目标的转弯半径。处理器110p使用目标的转弯半径和当前的速度v,根据上述的式6,来计算目标的侧倾角ar。而且,处理器110p也可以使用目标的侧倾角ar和当前的侧倾角ar,来确定侧倾角度差dar(即,基准信息dar)。
[0249]
(12)构成为产生使横摆角加速度变化的力的力产生装置也可以代替转向操纵马达65、65a,是其它任意的装置。例如,力产生装置也可以是产生相对于车体向右或左流动的空气流的风扇装置。另外,驱动系统51s(图2),即,驱动马达51r、51l通过控制右后轮12r与左后轮12l之间的扭矩的比率,能够使横摆角加速度变化(这样的扭矩的比率的控制也被称为扭矩矢量)。另外,车辆10在具备右后轮12r用的制动装置和左后轮12l用的制动装置的情况下,这些制动装置能够通过控制右后轮12r与左后轮12l之间的制动力的比率,使横摆角加速度变化。力产生装置也可以包含一种以上的装置(转向操纵马达65、驱动系统51s、制动装置等)。另外,力控制装置也可以包含分别控制一种以上的力产生装置的一种以上的控制装置。
[0250]
(13)构成为使车体在车辆的宽度方向上倾斜的倾斜装置的结构也可以代替连杆机构30(图2)的结构,为其它各种结构。例如,连杆机构30也可以置换为支架。驱动马达51l、51r固定于支架。而且,第一支承部82通过轴承以能够在宽度方向上旋转的方式连结于支架。倾斜马达25使第一支承部82相对于支架在宽度方向上旋转。由此,车体90能够向右方dr侧和左方dl侧分别倾斜。另外,倾斜装置也可以具备左滑动装置和右滑动装置(例如,液压缸)。也可以左滑动装置连接左后轮12l和车体,右滑动装置连接右后轮12r和车体。各滑动装置能够使车轮的车体上方dvu相对于车体的相对位置变化。
[0251]
(14)作为多个车轮的总数和配置,可以采用各种结构。例如,多个车轮也可以包含在车辆的宽度方向上相互分离配置的一对车轮。前轮(例如,图1的(a)的前轮12f)也可以是驱动轮。转动轮的总数也可以是一以上的任意的数。前轮和后轮中的至少一方也可以包含转动轮。也可以前轮和后轮双方是转动轮。转动轮也可以包含在车辆的宽度方向上相互分离配置的一对车轮。
[0252]
(15)支承转动轮的转动轮支承装置的结构也可以代替在图1的(a)等中说明的前轮支承装置41的结构,而为其它各种结构。例如,可旋转地支承转动轮的支承部件也可以代替叉形件17,而为悬臂部件。另外,将支承部件以能够相对于车体在宽度方向上转动的方式
支承的转动装置也可以代替轴承68,而为其它各种装置。例如,转动装置也可以是连结车体和支承部件的连杆机构。一般而言,转动轮支承装置也可以是将转动轮支承为转动轮的方向能够在车辆的宽度方向上转动的各种装置。
[0253]
在这里,转动轮支承装置也可以具备k个(k为1以上的整数)支承部件。各支承部件也可以可旋转地支承一个以上的转动轮。而且,转动轮支承装置也可以具备固定于车体的k个转动装置。k个转动装置也可以将k个支承部件分别可转动地支承在宽度方向上。
[0254]
(16)转动驱动装置的结构也可以代替转向操纵马达65(图1)的结构,而为构成为对转动轮赋予控制转动轮的宽度方向的转动的扭矩亦即转动扭矩的各种结构。例如,转动驱动装置也可以包含泵,使用来自泵的液压(例如,油压)产生转动扭矩。不管是哪种情况,转动驱动装置都可以构成为对k个支承部件中的每个支承部件赋予转动扭矩。例如,转动驱动装置也可以与k个支承部件中的每个支承部件连结。
[0255]
(17)控制装置100的结构也可以是包含构成为控制力产生装置(例如,转向操纵马达65、65a)的力控制装置的各种结构。例如,控制装置100也可以使用一个计算机来构成。控制装置100的至少一部分也可以由asic(application specific integrated circuit:专用集成电路)等专用的硬件来构成。例如,图7的转向操纵马达控制部500也可以由asic构成。另外,控制装置100也可以是包含计算机的电气电路,也可以代替于此,而为不包含计算机的电气电路。另外,通过地图数据(例如,地图数据mar等)建立有对应关系的输入值和输出值也可以通过其它要素来建立对应关系。例如,也可以数学函数、模拟电气电路等的要素对输入值和输出值建立对应关系。
[0256]
(18)车辆的结构也可以代替实施例的结构,而为其它各种结构。例如,驱动驱动轮的驱动装置也可以包含电动马达和内燃机中的至少一个。车辆的最大定员数也可以代替一人,而为两人以上。车辆也可以是不乘载人和货物中的至少一方而移动的装置。车辆也可以是通过远程操作移动的装置。用于车辆的控制的对应关系(例如,通过地图数据表示的对应关系)也可以通过实验来决定,以使车辆能够适当地行驶。
[0257]
在上述各实施例中,也可以将由硬件实现的结构的一部分置换为软件,相反,也可以将由软件实现的结构的一部分或全部置换为硬件。例如,也可以通过专用的硬件电路来实现图7的控制装置100的功能。
[0258]
另外,在通过计算机程序来实现本发明的功能的一部分或所有情况下,该程序能够以储存于计算机可读取的记录介质(例如,不是临时的记录介质)的形式来提供。程序可以在被储存于与提供时相同或不同的记录介质(计算机可读取的记录介质)的状态下使用。“计算机可读取的记录介质”并不限于存储卡、cd-rom这样的便携式的记录介质,也可以包含各种rom等计算机内的内部存储装置、硬盘驱动器等与计算机连接的外部存储装置。
[0259]
以上,基于实施例、变形例对本发明进行了说明,但上述的发明的实施方式是用于容易理解本发明的内容,并不是限定本发明的内容。本发明可以不脱离其主旨地进行变更、改进,并且其等价物包含于本发明。
[0260]
本发明能够适用于车辆。
[0261]
附图标记说明
[0262]
10、10a、10b
…
车辆,11
…
座椅,12f、fra、fla、fr、fl
…
前轮,12l
…
左后轮,12r
…
右后轮,rra、rla、rr
…
后轮,17
…
前叉,20
…
主体部,20a
…
前壁部,20b
…
底部,20c
…
后壁部,
20d
…
支承部,21
…
中纵向连杆部件,25
…
倾斜马达,30
…
倾斜装置(连杆机构),31d
…
下横向连杆部件,31u
…
上横向连杆部件,33l
…
左纵向连杆部件,33r
…
右纵向连杆部件,38
…
轴承,39
…
轴承,41
…
前轮支承装置,41a
…
方向盘,42
…
转向操纵装置,42a
…
方向盘,45
…
加速踏板,46
…
制动踏板,51l
…
左驱动马达,51r
…
右驱动马达,51s
…
驱动系统,51a
…
驱动马达,65
…
转动驱动装置,65、65a
…
转向操纵马达,68
…
轴承,70
…
悬架系统,70l
…
左悬架,70r
…
右悬架,71r、71l
…
螺旋弹簧,72r、72l
…
减震器,75
…
连结杆,80
…
后轮支承部,82
…
第一支承部,83
…
第二支承部,90、90a
…
车体,90c、90ac、90bc
…
重心,100、100a
…
控制装置,110
…
主控制部,110p、300p、400p、500p
…
处理器,,110v、300v、400v、500v
…
易失性存储装置,110n、300n、400n、500n
…
非易失性存储装置,110g、300g、400g、500g
…
程序,300c、400c、500c
…
电力控制部,120
…
蓄电池,122
…
车速传感器,123
…
输入角传感器,124
…
车轮角传感器,126
…
方向传感器,126a
…
加速度传感器,126c
…
控制部,126g
…
陀螺仪传感器,145
…
加速踏板传感器,146
…
制动踏板传感器,300
…
驱动装置控制部,400
…
倾斜马达控制部,500
…
转向操纵马达控制部,900
…
驱动控制装置,910
…
转动控制装置,axw1
…
旋转轴,axw2
…
旋转轴,axw3
…
旋转轴。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
