1.本发明涉及牵引座(sattelkupplung)、用于确定牵引座的载荷状况和/或磨损状况的方法以及用于升级牵引座的方法。
背景技术:
2.牵引座在现有技术中是众所周知的。它们通常用于将拖车,特别是将半拖车连接到牵引车,特别是可逆地连接到牵引车,以形成半拖车列车。特别地,本发明涉及特别是在耦接状态下载荷集合或作用在牵引座上的作用力矩和作用力的确定。
3.为此,在现有技术中已知的是测量作用在拖车的主销和牵引座的耦接板之间的力。已经说明了例如在主销中安装力传感器。然而,由于力传递通常还通过半挂车和耦接板之间的摩擦力进行,所以在此只能测量力流的一部分。
4.de 102006057327 b4说明了通过布置在安装面和牵引座之间的测量元件来测量牵引车的安装板或安装面与牵引座之间的力。然而,安装板或安装面存在大量不同的变型,因此必须为每个变型设计不同的解决方案。另外,在牵引座与安装板之间的该位置处,车架的影响相对较大,使得车架的相应变形会影响测量的力。
5.us 6302424 b1说明了在耦接板的轴承处的力测量。然而,在此未考虑到力流在轴承衬套(lagereinsatz)和阻尼元件之间的分配。因此,也必须共同确定这两个力路径的划分比例,但是由于轴承衬套或阻尼元件的老化和磨损,该确定是不可能的。
技术实现要素:
6.基于此,本发明的目的是提供一种能够以尽可能无偏置的方式得出经过该牵引座的力流的牵引座和/或一种能够(至少间接地)检测力和/或力矩的牵引座。此外,希望尽可能简单地升级现有的牵引座,以便确定这些牵引座中的力流。
7.该目的通过根据权利要求1所述的牵引座和根据权利要求14或15所述的方法实现。本发明的其他优点和特征在从属权利要求和说明书以及附图中给出。
8.根据本发明的第一方面,提供了一种用于将拖车可逆地耦接到牵引车的牵引座,其包括:
[0009]-用于容纳拖车的销元件的耦接板;以及
[0010]-轴承座,其用于将耦接板以能够围绕枢轴线,特别是围绕水平延伸的枢轴线枢转的方式支承,其中,设置有至少一个距离传感器,该距离传感器确定相对于参考面的距离,其中,所述至少一个距离传感器和/或参考面是轴承座的一部分或布置在轴承座上。与现有技术中已知的牵引座相比,根据本发明的牵引座设置有至少一个距离传感器,利用该距离传感器可以确定相对于参考面的距离,其中,距离传感器或参考面是轴承座的一部分或附接在其上。在此,确定的距离提供了关于牵引座在特定的载荷下的变形的尺寸和/或形状的信息。根据确定的距离并考虑到针对轴承座相应选择的刚度模型,可以有利地推断出牵引
座的,特别是轴承座的当前载荷状况或磨损状况。然后,借助于当前检测的载荷状况,例如可以有利地推断出半拖车列车的目前行驶状况。例如,可以推断出半拖车列车处的车道坡度、加速度、弯道半径和/或车辆载重量。这种信息可以有利地用于半拖车列车的自动驾驶或其控制,以便例如优化半拖车列车的能耗。此外,可以设想的是,在载荷状况的长期发展方面检查所检测的载荷状况,并根据该检查获得改善驾驶安全性和半拖车列车的允许使用控制的知识。在此,耦接板优选地以能够围绕枢轴线枢转的方式附接到轴承座,特别是附接到其外侧。由于耦接板可枢转地支承在轴承座上,耦接板可以围绕基本水平地且相对于牵引车的纵向方向横向地延伸的枢轴线移动,由此使得拖车和牵引车之间可以倾斜,或者可以在半拖车列车内跟随这种倾斜或俯仰运动。这种俯仰运动特别发生在上坡和/或下坡行驶时,例如在斜坡上。然而,枢轴线有利地布置在相对于参考面和/或与轴承座的重心的不可改变的距离处。换句话说,这可以意味着,除了由锁定引起的位置变化以外,枢轴线相对于参考面或轴承座的重心或所有轴承座的重心是固定的。由此可以实现可特别具有机械弹性的系统。在此,轴承座的重要部件是轴承座孔,其与固定在轴承座上的,例如固定在车架上的安装面间隔开。耦接板通过轴承衬套间接地附接到轴承座孔的外侧。优选地,轴承座是刚性设计的。在此,“刚性设计”特别应理解为轴承座不具有特别通过自动系统实现的例如在高度上的可调节性。优选地,拖车是半拖车,在耦接状态下,其前部区域布置在牵引车的安装有牵引座的后部上方。特别地,销元件或主销可以插入到耦接板的槽状开口中,并且可以在最终位置处固定在该槽状开口中,在该最终位置处,主销或销元件被安装为能够围绕基本垂直延伸的方向枢转,以便在转弯时允许牵引车和拖车之间的相应折弯。
[0011]
优选地,牵引座包括至少三个距离传感器。借助于至少三个距离传感器,可以有利地检测轴承座的三维变形,由此可以创建载荷状况的详细图像,特别是关于不同空间方向的图像。在此,可以设想的是,距离传感器分别检测垂直距离或垂直测量的距离。替代地,可以设想的是,在相互倾斜,特别是相互垂直的方向上测量所检测的距离。特别优选地,这三个距离传感器可以至少在两个,有利地在三个相互垂直的不同空间方向上确定和/或测量距离。因此,例如一个传感器可以测量或确定垂直距离,而两个传感器可以测量或确定水平距离。因此,能够以特别简单的方式实现可靠的载荷确定。
[0012]
在一优选实施例中,牵引座包括用于沿第一方向检测距离的第一距离传感器和用于沿第二方向检测距离的第二距离传感器,其中,第一方向和第二方向不相互平行。因此,可以有利地至少在一个截面中检测或估算轴承座的变形。优选地,该垂直截面平行于牵引车的纵向方向或平行于轴承座的安装面。为了获得测量的独立性,特别优选的是,第一和第二方向相互垂直。
[0013]
恰当地,牵引座配备有用于沿第三方向检测距离的第三距离传感器,其中,第三方向不平行于第一方向和/或第二方向,该第三方向特别是分别垂直于第一和第二方向。例如,可以设想的是,通过第三距离传感器检测在半拖车列车的横向方向上两个彼此相对的轴承座之间的距离。根据两个轴承座之间的距离,例如可以推断出可能的道路倾斜和/或转弯。
[0014]
优选地,距离传感器非接触地确定相对于参考面的距离。例如,为此可以使用电容式和/或电感式距离传感器。替代地,可以设想的是,距离传感器以光学的方式(例如,通过激光)和/或通过超声波确定距离。因此,在布置距离传感器时,必须注意距离传感器与相应
的参考面对准。因此,距离传感器在测量技术方面有利地与参考面相互作用。有利地,参考面被设计为导电的。因此,可以促进电容式和电感式传感器的使用。
[0015]
优选地,至少一个距离传感器布置为确定安装面和轴承座的面向安装面的下侧之间的距离,轴承座在安装状态下通过该安装面固定或连接在例如车架上。特别地,在这种布置中,当轴承座孔由于出现的载荷而朝向安装面移动时,检测轴承座孔的降低。这种距离传感器的集成相对简单,因为轴承座孔和安装面之间的区域通常不设置任何其他部件,因此也可以对现有的牵引座进行简单升级。
[0016]
优选地,参考面是导电的。特别地,参考面由金属制成。在此,可以设想的是,参考面是专门针对最佳距离测量而设计的,例如将其随后附接到轴承座和/或安装面,以便能够最佳地确定距离。在此,特别是要考虑用于确定距离的方法,并相应地设计参考面。特别地,参考面至少部分地被设计为是平坦的,即不弯曲的。
[0017]
特别地,牵引座包括阻尼元件,特别是弹性阻尼元件,其中,至少一个距离传感器或参考面优选地布置在阻尼元件上或中且/或布置在夹紧元件上或中。特别地,由于例如螺栓形式的夹紧元件穿过轴承座孔并且在夹紧元件的彼此相对的端件处附接到耦接板,耦接板借助于夹紧元件附接或固定到轴承座的外侧,由此将耦接板夹紧在轴承座或轴承座孔的外侧上。通过确定相对于阻尼元件的距离,可以通过对该距离的长期监测推断出阻尼元件的磨损状态。因此,当磨损状态超过预定阈值时,可以及时更换阻尼元件。
[0018]
特别地,至少一个距离传感器或参考面布置在耦接板上或中且/或布置在轴承衬套上或中。在轴承衬套中的这种布置下,能够有利地检测轴承衬套的磨损状态,以便可能在超过极限值时收到必须更换轴承衬套的提示。轴承衬套被设置为用于将耦接板间接地、滑动地附接到轴承座,特别是轴承座孔的外侧上。通过在耦接板上布置距离传感器,还可以检测轴承座与耦接板之间的距离的变化程度,这进而又表明轴承衬套例如由于磨损而已经变薄。
[0019]
优选地,在安装状态下,至少一个距离传感器或参考面布置在牵引车的车架上或中且/或布置在牵引车的车辆的安装面上或中。相应地,通过将距离传感器或参考面布置在牵引车的环绕轴承座的区域中,可以确定提供关于轴承座变形信息的距离。在此,轴承座特别是通过安装面附接在牵引车的后部上。特别地,可以设想的是,距离传感器的布置尽可能灵活地适应结构情况或状况。
[0020]
优选地,至少一个距离传感器或参考面布置在轴承座的连接区域中或上,轴承座在安装状态下通过该连接区域附接到安装面。例如,通过以此方式布置的距离传感器,可以检测相对于耦接板下侧的距离。在从纵向方向看时,距离传感器优选地布置在两个连接区域中的每者上,利用所述距离传感器分别在垂直方向上检测相对于耦接板的距离。因此,例如能够以有利的方式推断出耦接板的倾斜或耦接板的可能弯曲。
[0021]
优选地,至少一个距离传感器和参考面布置在轴承座的面向耦接板的外侧上。特别地,距离传感器与轴承孔的区域中的参考面对准,并相对于以平行于安装面的方式延伸的平面倾斜地进行距离测量。因此,例如允许特别是在轴承座孔的区域中检测轴承座的变形,这种变形通常出现在半拖车列车发生加速或制动时。
[0022]
优选地,牵引座,特别是轴承座包括用于检测力的另一传感器。例如,它是集成在轴承座中的力传感器,并且通过该力传感器能在特定位置处检测力值。在此,该另一传感器
不是检测相对于参考面的距离的距离传感器。因此,可以通过该另一传感器展示更完整的载荷状态图。特别地,该另一传感器可用于关于距离传感器的冗余测量。
[0023]
优选地,至少一个距离传感器集成在支架中。特别优选地,至少三个距离传感器集成在公共支架中,从而形成传感器系统,利用该传感器系统检测轴承座上的至少三个不同的距离。特别地,每个距离是相对于轴承座附近的相应参考面的距离。特别优选地,支架不安装在轴承座本身上,但轴承座仅提供参考面,而传感器系统布置在轴承座附近。此外,在升级牵引座时,集成在公共支架中的传感器系统被证明是特别有利的。例如,可以设想的是,公共支架通过磁体可拆卸地附接到安装面上的任意位置。
[0024]
本发明的另一方面是一种用于通过至少一个距离传感器确定牵引座的载荷状况和/或磨损状况的方法,其中,该牵引座包括:
[0025]-用于容纳拖车的销元件的耦接板;以及
[0026]-轴承座,其用于将耦接板以能够围绕枢轴线,特别是围绕水平延伸的枢轴线枢转的方式支承,其中,设置有至少一个距离传感器,该距离传感器确定相对于参考面的距离,其中,至少一个距离传感器和/或参考面是轴承座的一部分或布置在轴承座上。所有针对牵引座说明的特征和优点可以类似地转移到用于确定牵引座的载荷状况和/或磨损条件的方法,反之亦然。
[0027]
特别地,采用轴承座的刚度模型,根据该刚度模型通过确定的距离或确认的距离来确定当前载荷状况。为此,将相应的距离值输入到相应的计算机单元并通过该计算机单元进行相应地确定,并且然后特别优选地由计算机单元提供。例如,将检测的并由计算机单元确定的载荷状况提供给控制装置,该控制装置根据该载荷状况来确定半拖车列车的当前行驶状况。在此,可以设想的是,除了牵引座的载荷状况之外,控制装置还包括其他信息,以便尽可能准确地定义半拖车列车的当前行驶状况。此外,可以考虑的是,确定的载荷状况或当前确定的行驶状况可用于半拖车列车的自主控制或用于回收控制。
[0028]
本发明的另一方面是一种用于升级牵引座的方法,其中,该牵引座包括:
[0029]-用于容纳拖车的销元件的耦接板;以及
[0030]-轴承座,其用于将耦接板以能够围绕枢轴线,特别是围绕水平延伸的枢轴线枢转的方式支承,其中,至少一个距离传感器布置在牵引座上,其中,该距离传感器确定相对于参考面的距离,其中,至少一个距离传感器和/或参考面是轴承座的一部分或布置在轴承座上。所有针对牵引座说明的特征和优点可以类似地转移到用于升级牵引座的方法,反之亦然。换句话说,用于升级牵引座的方法可用于在升级后获得如上文和下文所述的牵引座。
附图说明
[0031]
其他优点和特征在参考附图的根据本发明的主题的优选实施例的以下说明中给出。
[0032]
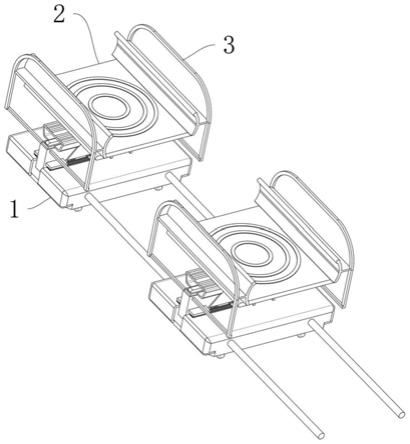
图1在俯视图中示意性地示出了根据本发明的第一示例性实施例的牵引座。
[0033]
图2在剖视图中示意性地示出了图1中的牵引座。
[0034]
图3在剖视图中示意性地示出了根据本发明的第二示例性实施例的牵引座。
[0035]
图4在剖视图中示意性地示出了根据本发明的第三示例性实施例的牵引座。
[0036]
图5在剖视图中示意性地示出了根据本发明的第四示例性实施例的牵引座。
[0037]
图6在剖视图中示意性地示出了根据本发明的第五示例性实施例的牵引座。
具体实施方式
[0038]
图1示意性地示出了根据本发明的第一示例性实施例的牵引座1。特别地,这种牵引座1用于将拖车(未示出),特别是将半拖车可逆地(即,可拆卸地)耦接到牵引车(未示出),以形成半拖车列车。在图1所示的视图中,示出了牵引座1的俯视图(从上方)。在此,牵引座1包括用于容纳拖车的销元件或主销的耦接板20。优选地,牵引座1在牵引车的后部附接到相应的安装板或安装面25,并且允许拖车或半拖车通过其销元件或主销进行连接。为了耦接,通过耦接板20的开口侧os上的插入区域54插入主销。漏斗形插入区域54将主销引导到其最终位置,在该位置处,主销可利用锁定件53进行固定。优选地,通过弹簧预张紧这种锁定件53,使得主销在其最终位置处不再能够离开插入区域54的端部处的由锁定件53限定的部分。在此,锁定件53可以通过解锁手柄52枢转或旋转,使得主销到插入区域54的开口端的路径被清空,并且最终主销可以在必要时再次离开固定位置。此外还设置有锁定装置55,以确保不会意外打开或操作解锁手柄52。在主销的固定位置处,主销在此以能够围绕基本垂直的方向枢转的方式支承,使得拖车和牵引车在转弯时可以以一定角度彼此对齐。
[0039]
为了在上坡或下坡行驶时允许牵引车和拖车之间相对于道路走向的成角度的对准(即,俯仰运动),耦接板20以能够围绕枢轴线s,特别是围绕基本水平地且相对于牵引车的纵向方向横向地延伸的枢轴线s枢转的方式支承。为了可枢转地支承耦接板20,耦接板20间接地附接到至少一个轴承座30,优选地附接到在牵引车的横向方向上彼此相对的两个轴承座30。
[0040]
图2在沿图1中的a-a线截取的剖视图中示出了图1的牵引座1。在所示的示例性实施例中,轴承座30具有弓形形状,其中,轴承座30的腿状元件具有连接区域45,轴承座30可以通过所述连接区域安装在牵引车的安装面25上。在从牵引车的纵向方向看时,轴承座30在轴承座30的连接表面45之间具有轴承座孔35,该轴承座孔35在垂直方向上与安装面25间隔开。为了可枢转地支承耦接板20,耦接板20通过轴承衬套21可滑动地、间接地支承在轴承座30的外侧。也就是说,在耦接板20围绕枢轴线s的枢转运动期间,耦接板20和轴承衬套21在轴承座30的外侧,特别是沿轴承座孔35的外侧被可滑动地引导,并由此进行枢转。例如,耦接板20在此通过夹紧元件24附接到轴承座孔35的外侧,该夹紧元件24特别是延伸穿过轴承座孔35的螺栓的形式。在此,优选地,将例如橡胶插入件形式的阻尼元件28在夹紧元件24和轴承座孔35的内侧之间设置在轴承座孔35中。
[0041]
在图2所示的示例性实施例中,牵引座1还包括至少一个距离传感器40,该距离传感器例如布置在安装面25上并且确定相对于参考面41的距离,其中,参考面41是轴承座30的一部分。在图2所示的实施例中,安装面25与轴承座30的面向安装面25的外侧之间的测量距离或者距离传感器40居中地位于轴承座30的连接区域45之间。替代地,可以设想的是,在从牵引车的纵向方向上看时,距离传感器40布置为相对于中心对准向前或向后偏移。特别地,图2中的距离传感器40测量在垂直于安装面25的方向上的距离。已经发现,通过距离测量,可以推断出轴承座30的变形,特别是弹性变形,而该变形又可用于确定牵引座1的当前载荷状况。为此,牵引座1优选地包括至少三个距离传感器,例如将每个距离传感器分配到一个空间方向,从而可以推断出牵引座的三维变形。特别地,采用牵引座1的刚度模型来确
定载荷,根据该刚度模型以及确定的牵引座变形可以推断出牵引座上的载荷或牵引座的当前载荷状况。例如,距离传感器40是电感式和/或电容式距离传感器40。替代地,可以设想的是,距离传感器40也可以是利用激光来测量距离的光学传感器,或者是超声波传感器。优选地,距离传感器40是非接触地确定距离的传感器。
[0042]
图3示出了根据本发明的第二优选实施例的牵引座1的剖视图。在此,特别地,距离传感器40布置在轴承座孔35中,特别是使得在基本垂直的方向上确定轴承座孔35的内侧上的距离传感器40与夹紧元件24之间的距离。相应地,在夹紧元件24的面向距离传感器40的一侧上形成参考面41。通过长期监测轴承座孔35的内侧和夹紧元件24之间的距离,可以有利地推断出阻尼元件28的磨损状态。与安装面和轴承座30的面向安装面的外侧之间的距离的(用于检测当前载荷的)确定相比,在图3的实施例中,通过至少一个距离传感器40来实现长期的状态监测。
[0043]
图4示出了根据本发明的第三优选实施例的牵引座1的剖视图。在该示例性实施例中,至少一个距离传感器40布置为确定轴承座30与耦接板20的面向轴承座30的一侧之间的距离。为此,参考面41和/或距离传感器40布置在耦接板20的下侧。特别地,确定耦接板20与轴承座30之间,特别是与轴承座孔35之间的基本垂直延伸的距离。以此方式,可以有利地推断出布置在耦接板20与轴承座30的外侧之间的轴承衬套21的磨损。相应地,图4的示例性实施例还提供了对距离的长期监测,以便以相应的方式推断出潜在磨损。
[0044]
图5示出了根据本发明的第四优选实施例的牵引座1的剖视图。在该实施例中,至少一个距离传感器40布置在轴承座30上,特别布置在轴承座30的连接区域45中,并且测量基本在垂直方向上测量的相对于耦接板20的下侧的距离。特别地,距离传感器40布置在两个连接区域45中的每者中,利用所述距离传感器分别测量相对于耦接板20的下侧的在垂直方向上的距离。因此,有利的是,可以根据由两个距离传感器40检测的距离推断出耦接板20的可能弯曲或耦接板20的当前倾斜角,而该弯曲或当前倾斜角又能提供关于牵引车和拖车之间的特别是相对于牵引车的车道的当前对准的信息。
[0045]
图6示出了根据本发明的第五优选实施例的用于牵引座1的轴承座30的剖视图。与图1至5的示例性实施例相比,在此不测量垂直方向上的距离,而是相对于安装面25基本倾斜地测量。特别地,距离传感器40布置在连接区域45中,并且参考面41布置在轴承座孔35的区域中,特别是布置在其外侧。因此,也可以获得关于轴承座30的当前变形度的信息或推断出轴承座30的该当前变形度。
[0046]
附图标记列表
[0047]
1 牵引座
[0048]
20 耦接板
[0049]
21 轴承衬套
[0050]
24 夹紧元件
[0051]
25 安装面
[0052]
28 阻尼元件
[0053]
30 轴承座
[0054]
35 轴承座孔
[0055]
40 距离传感器
[0056]
41 参考面
[0057]
45 连接区域
[0058]
52 解锁手柄
[0059]
53 锁定件
[0060]
54 插入区域
[0061]
55 锁定装置
[0062]
s 枢轴线
[0063]
os 开口侧
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。