1.本发明涉及机器手控制技术领域,具体为一种基于图像识别的机器手控制系统及其控制方法。
背景技术:
2.机械手控制系统是伴随着机械手(机器人)的发展而进步的。机械手是在早期出现的古代机器人基础上发展起来的,机械手研究始于20世纪中期,随着计算机和自动化技术的发展,特别是1946年第一台数字电子计算机问世以来,计算机取得了惊人的进步,向高速度、大容量、低价格的方向发展。同时,大批量生产的迫切需求推动了自动化技术的进展,又为机器人和机械手控制系统的开发奠定了基础。另一方面,核能技术的研究要求某些操作机械代替人处理放射性物质。
3.但是在现有技术中,机器手在运行过程中无法通过图像识别技术准确判定其运行状态,从而不能够根据实时状态进行准确控制,此外,在机器手控制过程中不能够根据其设备的准确特征进行合理控制,从而机器手控制的效率以及准确性降低,同时影响生产的进度降低工作效率。
4.针对上述的技术缺陷,现提出一种解决方案。
技术实现要素:
5.本发明的目的就在于为了解决的问题,而提出一种基于图像识别的机器手控制系统及其控制方法,对当前投入使用的机器手进行运行过程监测,通过图像识别技术对当前机器手的运行进行监测,判断当前机器手的运行是否正常,从而提高对机器手的智能控制,同时能够保证机器手的运行效率,防止机器手运行异常导致生产效率降低;将运行监测存在异常的机器手进行特征提取,提高机器手故障的分析准确性,通过采集机器手的故障特征增强对机器手运行的控制,有效降低机器手的故障风险,从而使得机器手的工作效率最大化,将运行监测存在异常的机器手标记为异常分析对象。
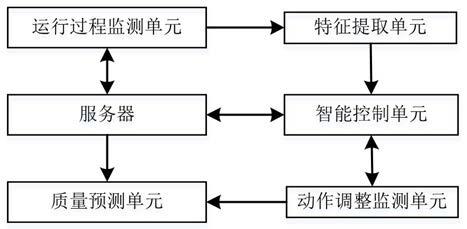
6.本发明的目的可以通过以下技术方案实现:一种基于图像识别的机器手控制系统,包括服务器,服务器通讯连接有运行过程监测单元、质量预测单元、智能控制单元、特征提取单元、动作调整监测单元;服务器生成运行过程监测信号并将运行过程监测信号发送至运行过程监测单元,通过运行过程监测单元对当前投入使用的机器手进行运行过程监测,若对应机器手的运行监测存在异常,生成特征提取信号并将特征提取信号发送至特征提取单元;特征提取单元将运行监测存在异常的机器手进行特征提取,通过特征提取生成合格特征数据和非合格特征数据,并将合格特征数据和非合格特征数据一同发送至智能控制单元;若对应机器手的运行监测正常,生成运行监测正常信号并将运行监测正常信号发送至服务器;智能控制单元接收到合格特征数据和非合格特征数据后,对当前机器手进行智能控制;并动作调整监测单元对机器手在运行过程中的智能控制进行监测;完成监测分析后
通过质量预测单元对机器手的运行质量进行预测。
7.作为本发明的一种优选实施方式,运行过程监测过程如下:设置监测时间段,并将监测时间段划分为i个子时间点,同时在监测时间段内对机器手进行监测,通过监测获取到机器手的活动部位,以各个子时间点为节点进行图像截取,并将每个子时间点对应的图像标记为分析图片,随后将分析图片根据各个子时间点的排列顺序进行排序;任意选取机器手的活动部位,并将其标记为分析部位,通过分析部位在运行周期内的各个位置,将分析图片进行周期划分,并将同一周期的分析图片标记为分析图组;将完成周期划分后的分析图片进行实时比对,以相邻周期的分析图组为比对对象,采集到相邻周期分析图组内分析图片对应分析部位的位置差值以及对应分析部位运行的速度差值,并将相邻周期分析图组内分析图片对应分析部位的位置差值以及对应分析部位运行的速度差值分别与位置差值阈值和速度差值阈值进行比较:若相邻周期分析图组内分析图片对应分析部位的位置差值超过位置差值阈值,或者对应分析部位运行的速度差值超过速度差值阈值,则判断对应机器手的运行监测存在异常,生成特征提取信号并将特征提取信号发送至特征提取单元;若相邻周期分析图组内分析图片对应分析部位的位置差值未超过位置差值阈值,且对应分析部位运行的速度差值未超过速度差值阈值,则判断对应机器手的运行监测正常,生成运行监测正常信号并将运行监测正常信号发送至服务器。
8.作为本发明的一种优选实施方式,特征提取的过程如下:将运行监测存在异常的机器手标记为异常分析对象,采集到异常分析对象的分析图组,且监测时间段内存在至少两个分析图组,若相邻周期的分析图组在比对过程中生成特征提取信号,则将对应相邻周期分析图组统一标记为异常图组;反之,若相邻周期的分析图组在比对过程中生成运行监测正常信号,则将对应相邻周期分析图组统一标记为正常图组;分别从正常图组和异常图组选取出周期内同一分析部位的同一分析图片进行比较,将正常图组和异常图组的分析图片进行部位数据提取,部位数据包括选择的分析部位在对应分析图片中,分析部位的角度改变值和活动速度;若正常图组和异常图组对应分析图片内部位数据一致,则将对应部位数据标记为合格特征数据;若正常图组和异常图组对应分析图片内部位数据不一致,则将对应部位数据标记为非合格特征数据;将合格特征数据和非合格特征数据一同发送至智能控制单元。
9.作为本发明的一种优选实施方式,动作调整监测单元的监测过程如下:对机器手的运行进行监测,并将存在动作调整的机器手标记为调整分析对象,设置标号k,k为大于1的自然数,采集到调整分析对象进行动作调整的频率以及进行动作调整的间隔时长,并将调整分析对象进行动作调整的频率以及进行动作调整的间隔时长分别标记为plk和sck;采集到调整分析对象重复进行同一动作调整的频率,并将调整分析对象重复进行同一动作调整的频率标记为tzk;通过分析获取到调整分析对象的动作调整监测系数xk,将调整分析对象的动作调整监测系数xk与动作调整监测系数阈值进行比较:若调整分析对象的动作调整监测系数xk超过动作调整监测系数阈值,则判定对应调整分析对象的动作调整监测不合格,生成动作调整异常信号并将动作调整异常信号发送至智能控制单元,智能控制单元接收到动作调整异常信号后生成暂停运行指令并将暂停运行指令发送至服务器,服务器将对应机器手进行停机维护;若调整分析对象的动作调整监测系数xk未超
过动作调整监测系数阈值,则判定对应调整分析对象的动作调整监测合格,生成动作调整正常信号并将动作调整正常信号发送至质量预测单元。
10.作为本发明的一种优选实施方式,质量预测过程如下:采集到机器手在运行过程中产品夹取合格率以及运行过程中工序重复进行的频率,并将机器手在运行过程中产品夹取合格率以及运行过程中工序重复进行的频率分别标记为j和l;通过分析获取到机器手的质量预测系数y,将机器手的质量预测系数y进行分析,若机器手的质量预测系数y呈上升趋势,则机器手质量预测为低质量趋势;若机器手的质量预测系数y呈下降趋势,则机器手质量预测为高质量趋势。
11.与现有技术相比,本发明的有益效果是:1、本发明中,对当前投入使用的机器手进行运行过程监测,通过图像识别技术对当前机器手的运行进行监测,判断当前机器手的运行是否正常,从而提高对机器手的智能控制,同时能够保证机器手的运行效率,防止机器手运行异常导致生产效率降低;将运行监测存在异常的机器手进行特征提取,提高机器手故障的分析准确性,通过采集机器手的故障特征增强对机器手运行的控制,有效降低机器手的故障风险,从而使得机器手的工作效率最大化,将运行监测存在异常的机器手标记为异常分析对象。
12.2、本发明中,对机器手在运行过程中的智能控制进行监测,判断机器手的动作调整是否合格,从而判断机器手的智能控制是否正常,确保机器手在运行过程中出现偏差后及时调整,保证了机器手的运行效率同时能够确保生产进度,将故障带来的影响降至最低;根据机器手的运行状态对其运行质量进行预测,从而增强机器手规避故障风险的概率,同时将生产过程中设备故障带来的影响降至最低。
附图说明
13.为了便于本领域技术人员理解,下面结合附图对本发明作进一步的说明。
14.图1为本发明的原理框图。
具体实施方式
15.下面将结合实施例对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
16.请参阅图1所示,一种基于图像识别的机器手控制系统,包括服务器,服务器通讯连接有运行过程监测单元、质量预测单元以及智能控制单元,同时智能控制单元与特征提取单元以及动作调整监测单元通讯连接,此外,特征提取单元与运行过程监测单元存在通讯连接,动作调整监测单元与质量预测单元存在通讯连接;在现有技术中机器手作为工业生产的重要工具,对工业生成起到积极促进作用,本技术则主要为机器手控制的系统;服务器作为机器手控制系统的核心,用于对机器手的运行控制进行数据信号传输,当机器手投入使用时服务器生成运行过程监测信号并将运行过程监测信号发送至运行过程监测单元;运行过程监测单元接收到运行过程监测信号后,对当前投入使用的机器手进行运行过程监测,通过图像识别技术对当前机器手的运行进行
监测,判断当前机器手的运行是否正常,从而提高对机器手的智能控制,同时能够保证机器手的运行效率,防止机器手运行异常导致生产效率降低,具体运行过程监测过程如下:设置监测时间段,并将监测时间段划分为i个子时间点,同时在监测时间段内对机器手进行监测,通过监测获取到机器手的活动部位,机器手的活动部位表示为机器手在运行过程中随着运行改变空间位置的部位;以各个子时间点为节点进行图像截取,并将每个子时间点对应的图像标记为分析图片,随后将分析图片根据各个子时间点的排列顺序进行排序;任意选取机器手的活动部位,并将其标记为分析部位,本技术中若机器手的活动部位仅为一则选取对应活动部位,若不唯一则选取任意活动部位均可;通过分析部位在运行周期内的各个位置,将分析图片进行周期划分,并将同一周期的分析图片标记为分析图组;将完成周期划分后的分析图片进行实时比对,以相邻周期的分析图组为比对对象,采集到相邻周期分析图组内分析图片对应分析部位的位置差值以及对应分析部位运行的速度差值,并将相邻周期分析图组内分析图片对应分析部位的位置差值以及对应分析部位运行的速度差值分别与位置差值阈值和速度差值阈值进行比较:若相邻周期分析图组内分析图片对应分析部位的位置差值超过位置差值阈值,或者对应分析部位运行的速度差值超过速度差值阈值,则判断对应机器手的运行监测存在异常,生成特征提取信号并将特征提取信号发送至特征提取单元;若相邻周期分析图组内分析图片对应分析部位的位置差值未超过位置差值阈值,且对应分析部位运行的速度差值未超过速度差值阈值,则判断对应机器手的运行监测正常,生成运行监测正常信号并将运行监测正常信号发送至服务器;特征提取单元接收到特征提取信号后,将运行监测存在异常的机器手进行特征提取,提高机器手故障的分析准确性,通过采集机器手的故障特征增强对机器手运行的控制,有效降低机器手的故障风险,从而使得机器手的工作效率最大化,将运行监测存在异常的机器手标记为异常分析对象,采集到异常分析对象的分析图组,且监测时间段内存在至少两个分析图组,若相邻周期的分析图组在比对过程中生成特征提取信号,则将对应相邻周期分析图组统一标记为异常图组;反之,若相邻周期的分析图组在比对过程中生成运行监测正常信号,则将对应相邻周期分析图组统一标记为正常图组;分别从正常图组和异常图组选取出周期内同一分析部位的同一分析图片进行比较,将正常图组和异常图组的分析图片进行部位数据提取,部位数据包括选择的分析部位在对应分析图片中,分析部位的角度改变值和活动速度;若正常图组和异常图组对应分析图片内部位数据一致,则将对应部位数据标记为合格特征数据;若正常图组和异常图组对应分析图片内部位数据不一致,则将对应部位数据标记为非合格特征数据;将合格特征数据和非合格特征数据一同发送至智能控制单元;智能控制单元接收到合格特征数据和非合格特征数据后,对当前机器手进行智能控制,根据合格特征数据以及非合格特征数据进行控制,将机器手对应分析部位的非合格特征数据进行调节,同时生成动作调整监测信号并将动作调整监测信号发送至动作调整监测单元;动作调整监测单元接收到动作调整监测信号后,对机器手在运行过程中的智能控制进行监测,动作调整表示为机器手的非合格特征数据转变为合格特征数据的调整,判断机器手的动作调整是否合格,从而判断机器手的智能控制是否正常,确保机器手在运行过
程中出现偏差后及时调整,保证了机器手的运行效率同时能够确保生产进度,将故障带来的影响降至最低;对机器手的运行进行监测,并将存在动作调整的机器手标记为调整分析对象,设置标号k,k为大于1的自然数,采集到调整分析对象进行动作调整的频率以及进行动作调整的间隔时长,并将调整分析对象进行动作调整的频率以及进行动作调整的间隔时长分别标记为plk和sck;采集到调整分析对象重复进行同一动作调整的频率,并将调整分析对象重复进行同一动作调整的频率标记为tzk;通过公式获取到调整分析对象的动作调整监测系数xk,其中,a1、a2以及a3均为预设比例系数,且a1>a2>a3>0,β为误差修正因子,取值为1.36;将调整分析对象的动作调整监测系数xk与动作调整监测系数阈值进行比较:若调整分析对象的动作调整监测系数xk超过动作调整监测系数阈值,则判定对应调整分析对象的动作调整监测不合格,生成动作调整异常信号并将动作调整异常信号发送至智能控制单元,智能控制单元接收到动作调整异常信号后生成暂停运行指令并将暂停运行指令发送至服务器,服务器将对应机器手进行停机维护;若调整分析对象的动作调整监测系数xk未超过动作调整监测系数阈值,则判定对应调整分析对象的动作调整监测合格,生成动作调整正常信号并将动作调整正常信号发送至质量预测单元;服务器接收到运行监测正常信号和动作调整正常信号后,生成质量预测信号并将质量预测信号发送至质量预测单元,质量预测单元用于对机器手的运行质量进行预测,根据机器手的运行状态对其运行质量进行预测,从而增强机器手规避故障风险的概率,同时将生产过程中设备故障带来的影响降至最低,具体质量预测过程如下:采集到机器手在运行过程中产品夹取合格率以及运行过程中工序重复进行的频率,并将机器手在运行过程中产品夹取合格率以及运行过程中工序重复进行的频率分别标记为j和l;通过公式获取到机器手的质量预测系数y,其中,e为自然常数,α为动作调整系数,当存在动作调整时,α为2,当不存在动作调整时,α为0.5;将机器手的质量预测系数y进行分析,若机器手的质量预测系数y呈上升趋势,则机器手质量预测为低质量趋势;若机器手的质量预测系数y呈下降趋势,则机器手质量预测为高质量趋势。
17.一种基于图像识别的机器手控制方法,具体控制方法步骤如下:步骤一、运行监测,对当前投入使用的机器手进行运行过程监测,通过图像识别技术对当前机器手的运行进行监测,判断当前机器手的运行是否正常,从而提高对机器手的智能控制,同时能够保证机器手的运行效率,防止机器手运行异常导致生产效率降低;步骤二、特征提取,将运行监测存在异常的机器手进行特征提取,通过特征提取生成合格特征数据和非合格特征数据;提高机器手故障的分析准确性,通过采集机器手的故障特征增强对机器手运行的控制,有效降低机器手的故障风险,从而使得机器手的工作效率最大化;步骤三、智能控制,对当前机器手进行智能控制,根据合格特征数据以及非合格特征数据进行控制,将机器手对应分析部位的非合格特征数据进行调节;
步骤四、调整监测,对机器手在运行过程中的智能控制进行监测,判断机器手的动作调整是否合格,从而判断机器手的智能控制是否正常;步骤五、质量预测,对机器手的运行质量进行预测,根据机器手的运行状态对其运行质量进行预测。
18.上述公式均是采集大量数据进行软件模拟得出且选取与真实值接近的一个公式,公式中的系数是由本领域技术人员根据实际情况进行设置;本发明在使用时,通过运行过程监测单元对当前投入使用的机器手进行运行过程监测,若对应机器手的运行监测存在异常,生成特征提取信号并将特征提取信号发送至特征提取单元;特征提取单元将运行监测存在异常的机器手进行特征提取,通过特征提取生成合格特征数据和非合格特征数据,并将合格特征数据和非合格特征数据一同发送至智能控制单元;若对应机器手的运行监测正常,生成运行监测正常信号并将运行监测正常信号发送至服务器;智能控制单元接收到合格特征数据和非合格特征数据后,对当前机器手进行智能控制;并动作调整监测单元对机器手在运行过程中的智能控制进行监测;完成监测分析后通过质量预测单元对机器手的运行质量进行预测。
19.以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。