1.本发明涉及到建筑风系统管道施工技术领域,具体涉及一种用于密封建筑风系统管道内部拼缝的机器人。
背景技术:
2.目前大多数办公楼及部分住宅均采用中央空调及新风系统,管道由多段拼接而成,两段管道的拼接处有拼缝,容易积灰且积灰后不易清除,易滋生病菌成为室内空气污染源,因此,需要将管道拼缝处密封。由于风系统管径较小,无法采用人工作业,通常使用机器人进行密封作业。机器人在工作时有两个引起机器人位置移动的因素,一是喷涂装置在工作时的振动引起作业机器人位置移动,二是管道安装无法做到绝对水平引起作业机器人由于重力作用产生滑动,以上两种因素导致作业机器人无法准确在拼缝处喷涂密封材料。
技术实现要素:
3.针对现有技术的不足,本发明的目的是提供一种用于密封建筑风系统管道内部拼缝的机器人,在行进到作业区域后,电机加大输出功率使得传动机构向各个方向履带传输更大力量,提高履带与管道的摩擦力,使得机器人在进行喷涂作业时不会在管道内产生位移,实现作业机器人在管道内稳定作业,提升管道内部拼缝喷涂质量,具有密封效果好、管道通过性强、结构简单可靠的优点。
4.为达到上述目的,本发明采用的技术方案如下:
5.一种用于密封建筑风系统管道内部拼缝的机器人,其关键在于:包括固定板以及转动连接于所述固定板左右两侧的移动机构,在所述固定板上固定有供料箱与旋转电机,在所述固定板的前后两侧设有安装槽,所述安装槽内限位装设有内齿圈,该内齿圈的内壁与固定在旋转电机输出轴上的驱动齿轮啮合,所述内齿圈的外壁上固定有环形的输料管,所述输料管上圆周均布有若干喷嘴,所述输料管的进料口通过可伸缩软管连接至所述供料箱。
6.进一步的,所述移动机构包括支撑组件以及设置于支撑组件周侧的若干移动组件,在所述支撑组件的任一端部固定有用于与所述固定板相连接的连接组件。
7.进一步的,所述支撑组件包括分设于两侧的支撑盘以及连接在两侧支撑盘之间呈圆周排布的若干第一滑杆,在该第一滑杆上滑动配合有滑盘,在所述滑盘的中心螺纹连接有螺杆,该螺杆的一端与其中一侧的支撑盘配合安装,配合处设有轴承,所述螺杆的另一端通过联轴器与调节电机输出轴固定连接,所述调节电机通过电机座安装在另一侧支撑盘的中心,在所述滑盘与任一侧支撑盘之间跨接所述移动组件。
8.进一步的,所述移动组件包括固定在所述支撑盘上的滑移结构以及固定在所述滑盘上的铰接座,所述滑移结构上铰接有第一连杆,所述铰接座上铰接有第二连杆,所述第一连杆的另一端与第二连杆的另一端分别和支撑架的两端相铰接,在所述支撑架上设有若干托辊,所述托辊上配合装配有履带,且其中一个托辊与固定在支撑架上的驱动电机输出轴
相连。
9.进一步的,所述滑移结构包括规定在支撑盘上的支撑板,在所述支撑板的两端之间跨接有第二滑杆,所述第二滑杆上滑套有滑块,所述滑块与所述第一连杆相铰接,在所述第二滑杆上还套设有复位弹簧,所述复位弹簧的一端与所述滑块相连,另一端与支撑板的任一端相连。
10.进一步的,所述连接组件包括固定于所述支撑组件上的连接架,所述连接架远离支撑组件的一端设有第一连接柱,所述第一连接柱与所述固定板转动连接。
11.进一步的,在所述第一连接柱与支撑组件之间的连接架上还设置有至少一根第二连接柱,所述第二连接柱限位于所述固定板上开设的弧形槽内。
12.进一步的,在所述移动机构的远端设置有第一摄像头,在其中至少一个所述喷嘴上设置有第二摄像头。
13.本发明的显著效果是:
14.1、整个机器人中部通过铰链连接,大大提高了机器人的通过性,在空调管道拐弯处可有效保证机器人的通过性,同时通过可伸缩喷嘴来实现管道内部的密封胶旋转喷涂,将整个管道内壁拼缝均喷涂上密封胶,进而解决了现有技术中管道内接缝积灰的问题,整个机器人具有管道通过性强,密封效果好,结构简单可靠的优点;
15.2、机器人的两端设置有摄像头以用于检测管道拼缝,在即将到达拼缝处时减速慢行,由设置在喷头上的第二摄像头精确判断喷嘴是否与拼缝正对,达到正对条件时机器人停止移动,保证密封胶的喷涂位置准确位于拼缝处;
16.3、在达到拼缝正对的位置时,通过控制调节电机带动螺杆转动使得滑盘运动,进而通过第一连杆与第二连杆配合将移动组件向四周撑开,使得机器人在整个喷涂过程中均能够牢靠的固定在管道内,且可以无视管道的截面是何形状,保证机器人在管道中的位置不会由于喷涂作业产生的振动引起位置偏移,或者管道无法做到而绝对水平引起的位置偏移,使得喷涂的密封胶与拼缝能够高度重合。
附图说明
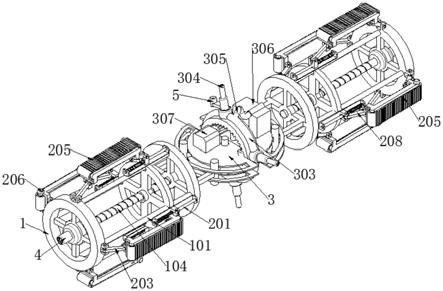
17.图1是本发明的结构示意图;
18.图2是本发明的主视图;
19.图3是所述移动机构的结构示意图;
20.图4是所述移动组件的结构示意图;
21.图5是固定板与移动结构的连接状态示意图。
具体实施方式
22.下面结合附图对本发明的具体实施方式以及工作原理作进一步详细说明。
23.如图1-图5所示,一种用于密封建筑风系统管道内部拼缝的机器人,包括固定板3以及转动连接于所述固定板3左右两侧的移动机构,在所述固定板3上固定有供料箱306与旋转电机307,在所述固定板3的前后两侧设有安装槽301,所述安装槽301内限位装设有内齿圈302,该内齿圈302的内壁与固定在旋转电机307输出轴上的驱动齿轮308啮合,所述内齿圈302的外壁上固定有环形的输料管303,所述输料管303上圆周均布有若干喷嘴304,所
述输料管303的进料口通过可伸缩软管305连接至所述供料箱306,在所述移动机构的远端设置有第一摄像头4,在其中至少一个所述喷嘴304上设置有第二摄像头5。
24.本例中,所述移动机构包括支撑组件以及设置于支撑组件周侧的若干移动组件,在所述支撑组件的任一端部固定有用于与所述固定板3相连接的连接组件。
25.本例中,所述支撑组件包括分设于两侧的支撑盘1以及连接在两侧支撑盘1之间呈圆周排布的若干第一滑杆101,在该第一滑杆101上滑动配合有滑盘106,在所述滑盘106的中心螺纹连接有螺杆104,该螺杆104的一端与其中一侧的支撑盘1配合安装,配合处设有轴承,所述螺杆104的另一端通过联轴器与调节电机103输出轴固定连接,所述调节电机103通过电机座102安装在另一侧支撑盘1的中心,在所述滑盘106与任一侧支撑盘1之间跨接所述移动组件,所述第一摄像头4设置在远离固定板3的支撑盘1的中心。
26.具体的,所述移动组件包括固定在所述支撑盘1上的滑移结构以及固定在所述滑盘106上的铰接座107,所述滑移结构上铰接有第一连杆203,所述铰接座107上铰接有第二连杆208,所述第一连杆203的另一端与第二连杆208的另一端分别和支撑架204的两端相铰接,在所述支撑架204上设有若干托辊207,所述托辊207上配合装配有履带205,且其中一个托辊207与固定在支撑架204上的驱动电机206输出轴相连。
27.优选的,所述滑移结构包括规定在支撑盘1上的支撑板2,在所述支撑板2的两端之间跨接有第二滑杆201,所述第二滑杆201上滑套有滑块202,所述滑块202与所述第一连杆203相铰接,在所述第二滑杆201上还套设有复位弹簧209,所述复位弹簧209的一端与所述滑块202相连,另一端与支撑板2的任一端相连。
28.具体的,所述连接组件包括固定于所述支撑组件上的连接架105,所述连接架105远离支撑组件的一端设有第一连接柱108,所述第一连接柱108与所述固定板3转动连接。
29.优选的,在所述第一连接柱108与支撑组件之间的连接架105上还设置有至少一根第二连接柱109,所述第二连接柱109限位于所述固定板3上开设的弧形槽309内。
30.在具体实施时,在固定板3上设置一个控制装置,并将所述旋转电机307、供料箱306内的供料泵、第一摄像头4、第二摄像头5、调节电机103、驱动电机206电连接至控制装置,且该控制装置还通过无线网络模块与后台控制终端进行数据交互。
31.在需要对风系统管道的拼缝实现从内部密封时,将机器人放置于管道进口处,后台控制终端发出控制信号,控制驱动电机206驱动托辊207转动带动履带205旋转,即可实现机器人在空调管道内部的移动;在移动过程中,整个机器人中部通过铰链连接,在空调管道拐弯处可有效保证机器人的通过性,大大提高了机器人的通过性;
32.在移动时,后台控制终端通过位于机器人前端的第一摄像头4以用于初步识别检测管道拼缝,在即将到达拼缝处时后台控制终端控制驱动电机206的转速以达到机器人的减速慢行,然后后台控制终端由设置在喷头304上的第二摄像头5进行管道拼缝的精确识别检测,从而精确判断喷嘴是否与拼缝正对,达到正对条件时(即喷头304正对拼缝处)控制驱动电机206使机器人停止移动;
33.机器人停止移动后,通过后台控制终端控制调节电机103带动螺杆104转动使得滑盘106运动,进而通过第一连杆203与第二连杆208配合将移动组件向四周撑开,以保证机器人周侧的每个履带205与管道内壁均紧密贴合,从而将能够适应于不同形状截面的风系统管道,均能够使得机器人牢靠的固定在管道内,避免机器人不会由于喷涂作业产生的振动
而引起位置偏移,或者管道无法做到而绝对水平引起的位置偏移,使得喷涂的密封胶与拼缝能够高度重合;
34.通过后台控制终端控制内设供料泵的供料箱306,通过可伸缩软管305、输料管303向喷嘴304供料,之后控制旋转电机307通过驱动齿轮308驱动内齿圈302转动,进而使得喷嘴304转动喷涂将整个管道内壁拼缝均喷涂上密封胶;
35.当此处拼缝完成后,后台控制终端关闭供料箱306的供料泵、旋转电机307,通过控制调节电机103带动螺杆104转动使得滑盘106恢复至初始位置,进而在复位弹簧209的弹力作用下通过第一连杆203与第二连杆208配合将移动组件向中心收拢,使得底部履带205之外的其余履带脱离管道内壁,以便于机器人能够在管道内正常移动;
36.反复进行上述过程即可完成整个风系统管道的拼缝密封作业。
37.以上对本发明所提供的技术方案进行了详细介绍。本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干改进和修饰,这些改进和修饰也落入本发明权利要求的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
