1.本发明涉及远程驾驶领域,更具体地,涉及一种驾驶模拟器的远程驾驶速度优化方法。
背景技术:
2.速度控制是以速度为实际值进行闭环控制,在加速时与转矩控制类似,但在减速时由于电机的反馈制动,使得所产生的减速度要大得多。由于无人驾驶技术快速发展,速度控制的车辆更加适合现有的无人驾驶框架,因此现在大部分智能车辆都是速度控制车辆。而通过速度控制车辆的方式存在驾驶员的操作与想要得到的速度输出并不相符的问题,尤其在远程驾驶领域。远程驾驶纵向控制模型是驾驶模拟器的油门踏板输入对应速度输入,倘若驾驶员松开油门踏板希望车辆滑行减速时,速度控制的车辆会读取踏板输入对应的速度值,以较大的减速度使车辆迅速减速,而不是习惯上的滑行减速。这与大部分驾驶人员的驾驶习惯是不一致的,特别是对于重载车辆,若远程驾驶员松开油门希望缓慢减速时,车辆会产生较大的减速度,因此产生的惯性会对重载车辆或货物造成损害,同时也会使得远程驾驶员难以准确把控车辆位置。目前大部分远程驾驶研究聚焦于系统设计,对于远程驾驶下所产生的速度与驾驶人意图可能不一致的问题极少涉及。
技术实现要素:
3.本发明为克服上述现有技术中远程驾驶下所产生的速度与驾驶人意图不一致的问题,提供一种驾驶模拟器的远程驾驶速度优化方法,令驾驶人的操作意图与实际输出的速度一致。
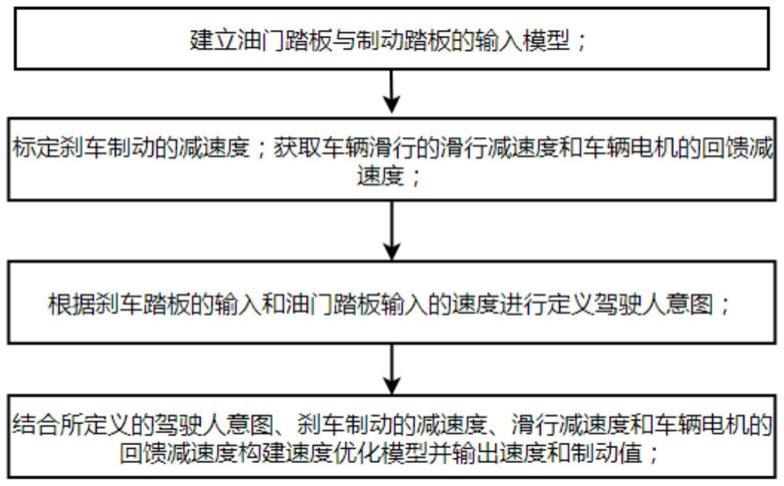
4.为解决上述技术问题,本发明采用的技术方案是:一种驾驶模拟器的远程驾驶速度优化方法,包括如下步骤:
5.步骤一:建立油门踏板与制动踏板的输入模型;在驾驶模拟器的输入中,油门踏板的输入为α:0-100%,制动踏板的输入为β:0-100%;车辆允许运行的最大速度为v
max
,最大制动力为f
max
;油门踏板输入的速度为:v=αv
max
;制动踏板的制动值为:f=βf
max
;
6.步骤二:标定刹车制动的减速度获取车辆滑行的滑行减速度a1和车辆电机的回馈减速度a2;
7.步骤三:根据刹车踏板的输入和油门踏板输入的速度进行定义驾驶人意图;
8.步骤四:结合所定义的驾驶人意图、刹车制动的减速度a3、滑行减速度a1和车辆电机的回馈减速度a2构建速度优化模型并输出速度和制动值。
9.在上述技术方案中,先获得滑行减速度a1、车辆电机的回馈减速度a2和刹车制动的减速度a3,在进行远程驾驶的时候,先根据油门踏板输入α和制动踏板输入β判断驾驶人意图,并对应不同的驾驶员意图利用a1、a2和a3来组合不同的速度优化模型,使得车辆获优化后的速度和制动值,并按照优化后的值进行行驶,实现更加准确和平缓的控制,可避免车辆在远程驾驶时产生的非必要制动,还可以使驾驶员对车辆位置能更精准的把控。
10.优选的,驾驶人意图具体定义如下:
11.当β≤防止误触阈值,v=αv
max
》v
feedback
;v
feedback
为车辆的实际速度,将驾驶员的意图定义为加速;
12.当β≤防止误触阈值,v=αv
max
《v
feedback
;将驾驶员的意图定义为车辆缓慢滑行减速;
13.当防止误触阈值《β≤制动阈值,将驾驶员的意图定义为缓慢减速;
14.当β》制动阈值,将驾驶员的意图定义为快速减速;
15.当将驾驶员的意图定义为急刹。
16.误触阈值是刹车踏板的一个输入值,其设定是防止驾驶员轻微误触刹车踏板,导致车辆产生制动。但实际上此时驾驶员可能并没有制动车辆的意图,因此在这个误触阈值以内,通过判断油门踏板输入的速度来确定驾驶员的实际意图。制动阈值是当超过这个阈值后,驾驶员有明显的刹车意图。这两个阈值的设置可以根据油门踏板和刹车踏板的灵敏度以及驾驶员的习惯进行设定。
17.优选的,速度优化模型根据驾驶人意图划分为不同的工况,具体为:加速工况、滑行减速工况、主动缓慢减速工况、主动快速减速工况和急刹工况。
18.优选的,加速工况优化后的输出速度与制动值与优化前一致,驾驶员加速时,速度控制模式和转矩控制模式都是希望车辆以较快的速度达到指定速度,故优化后输出不变。
19.滑行减速工况在每一个控制周期t内的优化模型为:
20.v
′
=v
feedback
at=v
feedback
f(v
feedback
)t
21.a=a1=f(v
feedback
)
22.在滑行减速工况下,油门踏板输入速度v=αv
max
《v
feedback
且制动踏板输入β≤3%,若不进行速度优化,车辆会以电机反馈制动提供的较大的减速度减速,与驾驶员希望的滑行减速意图不同,导致难以把握车辆行驶位置,而且若车辆为重载车,重载车频繁的产生较大的减速度,可能对车辆和货物造成损害,因此需根据步骤三中标定得到的滑行减速的减速度a1来优化。
23.主动缓慢减速工况在每一个控制周期t内的优化模型为:
24.v
′
=v
feedback
at
[0025][0026]
在主动缓慢减速工况下,制动踏板输入为3%《β≤30%,此时相当于驾驶人员轻踩刹车,车辆需产生额外的减速度,使得车辆相对于滑行减速有更大一些的加速度,但直接使用车辆的刹车系统又会使得电机回馈制动被浪费,将回馈减速度a2和滑行减速度a1根据踏板输入β做线性处理对速度和加速度进行优化。
[0027]
主动快速减速工况在每一个控制周期t内的优化模型为:
[0028]v′
=v
feedback-at
[0029][0030]
主动快速减速工况下,制动踏板输入为β》30%,此时相当于驾驶员希望获取更大
的减速度,因此必须要车辆刹车系统提供一定的制动力。
[0031]
急刹工况在每一个控制周期t内的优化模型为:
[0032]v′
=v
feedback-at
[0033][0034]f′
=0.8f
max
~1.0f
max
[0035]
上述的所有式中,v
′
为优化模型输出的速度;a为优化模型输出的加速度;v
feedback
为车辆实际速度;f
′
为优化模型输出的制动值。
[0036]
优选的,滑行减速度a1的获取方法具体为:采集在无电机反馈减速度时的滑行减速的速度数据,使用ransac算法将采集到的速度数据拟合出v-t曲线,对曲线求导得到不同速度下的滑行减速度a1。
[0037]
优选的,车辆电机的回馈减速度a2的获取方法具体为:采集在有电机反馈减速度时的滑行减速的速度数据,使用ransac算法将采集到的速度数据拟合出v-t曲线,对曲线求导得到不同速度下的回馈减速度a2。
[0038]
一种驾驶模拟器的远程驾驶系统,用于实现上述驾驶模拟器的远程驾驶速度优化方法,包括驾驶模拟器、车载通信装置和分别与所述驾驶模拟器和车载通信装置通讯连接的车辆工况机,所述车辆工况机包括加载有速度优化模型的速度优化模块。驾驶模拟器将油门踏板输入和制动踏板输入传输至车端工况机的速度优化模块内,车载通信装置将车辆实际的速度和制动值传输至车端工况机的速度优化模块内,速度优化模块将优化后的速度和制动值传输至车载通信装置,最终实现对车辆的控制。
[0039]
优选的,所述驾驶模拟器通过socket网络通信与所述车载工况机进行通讯连接。
[0040]
优选的,所述车载通信装置通过can通信与所述车载工况机进行通讯连接。
[0041]
一种计算机可读存储介质,用于存储计算机程序;其中计算机程序被处理器执行时实现如上述的驾驶模拟器的远程驾驶速度优化方法。
[0042]
与现有技术相比,本发明的有益效果是:通过对驾驶员的实际意图建立速度和制动值的优化模型对车辆的速度和制动值进行远程控制,使得车辆在实际形式的过程中的速度和制动更加符合驾驶员的意图,使得驾驶员能更准确的把控车辆位置而减少不必要制动或加减速,更加准确和平缓的实现车辆的远程控制。
附图说明
[0043]
图1是本发明一种驾驶模拟器的远程驾驶速度优化方法的流程图;
[0044]
图2是本发明的一种驾驶模拟器的远程驾驶系统的架构示意图。
具体实施方式
[0045]
附图仅用于示例性说明,不能理解为对本专利的限制;为了更好说明本实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;对于本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。附图中描述位置关系仅用于示例性说明,不能理解为对本专利的限制。
[0046]
本发明实施例的附图中相同或相似的标号对应相同或相似的部件;在本发明的描述中,需要理解的是,若有术语“上”、“下”、“左”、“右”“长”“短”等指示的方位或位置关系为
基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此附图中描述位置关系的用语仅用于示例性说明,不能理解为对本专利的限制,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
[0047]
本发明实施例的附图中为了方便阅读理解,机壳结构中的前板、后板和顶板均为示出。
[0048]
下面通过具体实施例,并结合附图,对本发明的技术方案作进一步的具体描述:
[0049]
实施例1
[0050]
如图1所示为一种驾驶模拟器的远程驾驶速度优化方法的实施例,包括如下步骤:
[0051]
步骤一:建立油门踏板与制动踏板的输入模型;在驾驶模拟器的输入中,油门踏板的输入为α:0-100%,制动踏板的输入为β:0-100%;车辆允许运行的最大速度为v
max
,最大制动力为f
max
;油门踏板输入的速度为:v=αv
max
;制动踏板的制动值为:f=βf
max
;
[0052]
步骤二:标定刹车制动的减速度获取车辆滑行的滑行减速度a1和车辆电机的回馈减速度a2;,滑行减速度a1的获取方法具体为:采集在无电机反馈减速度时的滑行减速的速度数据,使用ransac算法将采集到的速度数据拟合出v-t曲线,对曲线求导得到不同速度下的滑行减速度a1。车辆电机的回馈减速度a2的获取方法具体为:采集在有电机反馈减速度时的滑行减速的速度数据,使用ransac算法将采集到的速度数据拟合出v-t曲线,对曲线求导得到不同速度下的回馈减速度a2。
[0053]
步骤三:根据刹车踏板的输入和油门踏板输入的速度进行定义驾驶人意图;具体定义如下:
[0054]
当β≤3%,v=αv
max
》v
feedback
;v
feedback
为车辆的实际速度,将驾驶员的意图定义为加速;
[0055]
当β≤3%,v=αv
max
《v
feedback
;将驾驶员的意图定义为车辆缓慢滑行减速;
[0056]
当3%《β≤30%,将驾驶员的意图定义为缓慢减速;
[0057]
当β》30%,将驾驶员的意图定义为快速减速;
[0058]
当将驾驶员的意图定义为急刹。
[0059]
步骤四:结合所定义的驾驶人意图、刹车制动的减速度a3、滑行减速度a1和车辆电机的回馈减速度a2构建速度优化模型并输出速度和制动值。
[0060]
速度优化模型根据驾驶人意图划分为不同的工况,加速工况优化后的输出速度与制动值与优化前一致,驾驶员加速时,速度控制模式和转矩控制模式都是希望车辆以较快的速度达到指定速度,故优化后输出不变。
[0061]
滑行减速工况在每一个控制周期t内的优化模型为:
[0062]v′
=v
feedback
at=v
feedback
f(v
feedback
)t
[0063]
a=a1=f(v
feedback
)
[0064]
在滑行减速工况下,油门踏板输入速度v=αv
max
《v
feedback
且制动踏板输入β≤3%,若不进行速度优化,车辆会以电机反馈制动提供的较大的减速度减速,与驾驶员希望的滑行减速意图不同,导致难以把握车辆行驶位置,而且若车辆为重载车,重载车频繁的产生较大的减速度,可能对车辆和货物造成损害,因此需根据步骤三中标定得到的滑行减速的减
速度a1来优化。
[0065]
主动缓慢减速工况在每一个控制周期t内的优化模型为:
[0066]v′
=v
feedback
at
[0067][0068]
在主动缓慢减速工况下,制动踏板输入为3%《β≤30%,此时相当于驾驶人员轻踩刹车,车辆需产生额外的减速度,使得车辆相对于滑行减速有更大一些的加速度,但直接使用车辆的刹车系统又会使得电机回馈制动被浪费,将回馈减速度a2和滑行减速度a1根据踏板输入β做线性处理对速度和加速度进行优化。
[0069]
主动快速减速工况在每一个控制周期t内的优化模型为:
[0070]v′
=v
feedback-at
[0071][0072]
主动快速减速工况下,制动踏板输入为β》30%,此时相当于驾驶员希望获取更大的减速度,因此必须要车辆刹车系统提供一定的制动力。
[0073]
急刹工况在每一个控制周期t内的优化模型为:
[0074]v′
=v
feedback-at
[0075][0076]f′
=0.8f
max
~1.0f
max
[0077]
上述的所有式中,v
′
为优化模型输出的速度;a为优化模型输出的加速度;v
feedback
为车辆实际速度;f
′
为优化模型输出的制动值。
[0078]
本实施例的工作原理:先获得滑行减速度a1、车辆电机的回馈减速度a2和刹车制动的减速度a3,在进行远程驾驶的时候,先根据油门踏板输入α和制动踏板输入β判断驾驶人意图,并对应不同的驾驶员意图利用a1、a2和a3来组合不同的速度优化模型对应的工况,使得车辆获优化后的速度和制动值,并按照优化后的值进行行驶,实现更加准确和平缓的控制,可避免车辆在远程驾驶时产生的非必要制动,还可以使驾驶员对车辆位置能更精准的把控。
[0079]
本实施例的有益效果:通过对驾驶员的实际意图建立速度和制动值的优化模型对车辆的速度和制动值进行远程控制,使得车辆在实际形式的过程中的速度和制动更加符合驾驶员的意图,使得驾驶员能更准确的把控车辆位置而减少不必要制动或加减速,更加准确和平缓的实现车辆的远程控制。
[0080]
实施例2
[0081]
一种驾驶模拟器的远程驾驶系统的实施例,用于实现实施例1驾驶模拟器的远程驾驶速度优化方法,包括驾驶模拟器、车载通信装置和分别与所述驾驶模拟器和车载通信装置通讯连接的车辆工况机,所述车辆工况机包括加载有速度优化模型的速度优化模块。驾驶模拟器将油门踏板输入和制动踏板输入传输至车端工况机的速度优化模块内,车载通信装置将车辆实际的速度和制动值传输至车端工况机的速度优化模块内,速度优化模块将优化后的速度和制动值传输至车载通信装置,最终实现对车辆的控制。
[0082]
具体的,所述驾驶模拟器通过socket网络通信与所述车载工况机进行通讯连接。所述车载通信装置通过can通信与所述车载工况机进行通讯连接。
[0083]
实施例3
[0084]
一种计算机可读存储介质,用于存储计算机程序;其中计算机程序被处理器执行时实现实施1的驾驶模拟器的远程驾驶速度优化方法。
[0085]
显然,本发明的上述实施例仅仅是为清楚地说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。