1.本发明属于幼儿科学实验探索技术领域,特别是涉及用于幼儿科学探索实验的智能调速吸尘器。
背景技术:
2.科学实验,是指根据一定目的,运用一定的仪器、设备等物质手段,在人工控制的条件下,观察、研究自然现象及其规律性的社会实践形式,是获取经验事实和检验科学假说、理论真理性的重要途径,它不仅包括仪器、设备、实验的物质对象,还包括背景知识、理论假设、数据分析、科学解释,以及实验者之间的协商、交流和资金的获取等相关社会因素,为了使得幼儿能够更直观的了解吸尘器的工作原理,制作吸尘器模型用于实验是必要的,但是传统的模型吸尘器存在以下缺陷:
3.一、传统的吸尘器实验模型,只能够实现一种频率的工作速度,因为其只具有电机作为驱动器,电池作为供电器,而没有其他的部件,如此单一的结构,只能够满足一种转动速度,因此也只能够实验出一种实验数据结果。
4.二、传统的吸尘器实验模型,结构单一,并且没有握把,在实验的过程中,只能够握住机身,这在实验过程中,是存在危险性的,特别是对于幼儿来说。
技术实现要素:
5.本发明的目的是提供用于幼儿科学探索实验的智能调速吸尘器,以解决传统的吸尘器实验模型,只能够实现一种频率的工作速度,因为其只具有电机作为驱动器,电池作为供电器,而没有其他的部件,如此单一的结构,只能够满足一种转动速度,因此也只能够实验出一种实验数据结果,传统的吸尘器实验模型,结构单一,并且没有握把,在实验的过程中,只能够握住机身,这在实验过程中,是存在危险性的,特别是对于幼儿来说的技术问题。
6.本发明解决上述技术问题的技术方案如下:用于幼儿科学探索实验的智能调速吸尘器,包括安装套:所述安装套的内部嵌入式安装有电机本体,所述电机本体的输出轴固定安装有转动风扇,所述安装套的一侧插接有真空套管,所述真空套管的一侧连通有连通管,所述安装套的一侧固定连接有两个连接短柱,两个连接短柱的一端固定连接有供电设备,所述安装套一侧的两端均固定连接有套杆,两个套杆的表面套接有安装件一,所述安装件一的一侧固定连接有套接在两个上套杆的安装件二,所述安装件二的一侧固定连接有握把,所述握把的一侧设置有器件外壳,所述器件外壳顶部的一侧嵌入式安装有控制器,所述器件外壳顶部的一侧嵌入式安装有脉宽调速设备,所述连通管的一端连通有端头,供电设备包括固定连接在两个连接短柱上的安装板,所述安装板一侧的顶部和底部均固定连接有卡板,两个卡板之间卡接有电池盒,所述电池盒的内部安装有两个电池,所述连通管的下方设置有实验盒。
7.优选的,所述安装件一的两侧均开设有与套杆适配的安装孔二,所述安装件二的两侧均开设有与套杆适配的安装孔一。
8.优选的,所述器件外壳的一侧固定连接有卡件,所述卡件卡套在握把上
9.优选的,所述真空套管的一侧固定连接有多个插销,所述安装套的一侧开设有多个与插销适配的插孔。
10.用于幼儿科学探索实验的智能调速吸尘器的调速方法,包括采集电机本体的供电设备的电压;
11.根据采集得到的电压确定电机本体的供电设备的电量状态;
12.在电机本体的供电设备处于高电量状态的情况下,根据电机本体的供电设备的电压确定电机本体的调速数据,其中,调速数据至少包括:全速运行时间、调速时间和pwm占空比;
13.其中,当采集得到的供电设备的电压为v时,确定供电设备的电量状态对应于高电量状态;
14.其中,采集电机本体的供电设备的电压,包括:
15.在预定的采集时间内连续多次检测电机本体的供电设备的电压;
16.计算多次检测电机本体的供电设备的电压得到的多个电压的平均值,确认平均值为采集得到的电机本体的供电设备的电压;
17.其中,在电机本体动作的情况下,预定的采集时间为电机的动作开始时间和电机的动作结束时间,在电机本体未动作的情况下,采集时间为预设的采集周期时间,其中在电机本体的动作结束后,以电机本体的动作结束时间为预设的采集周期的起始时间;
18.在确定电机本体的调速数据之后,方法还包括:
19.在全速运行时间内控制电机本体全速运行;
20.在调速时内控制电机本体按照pwm占空比减速运行。
21.优选的,根据电机本体的供电设备的电压确定电机本体的调速数据,包括:将电机本体的供电设备的电压在调速数据库中进行匹配,确定电压所属的电压区间;获取与电压区间相对应的全速运行时间、调速时间和pwm占空比;其中,调速数据库用于保存多个预先设置的电压区间,以及每个电压区间相对应的调速数据。
22.优选的,在根据电机本体的供电设备的电压确定电机本体的调速数据之后,方法还包括:电机本体驱动目标装置在全速运行时间内按照预设的速度进行工作,并确定目标装置在调速时间内按照pwm占空比确定的运行速度进行工作,返回继续采集电机本体的供电设备的电压,以根据采集到的新电压来确定新的调速数据。
23.优选的,在电机本体未动作的情况下,根据采集得到的电压确定电机本体的供电设备的电量状态,包括:获取采集得到的电机本体开始动作时电机本体的供电设备的第一电压和电机本体结束动作时电机本体的供电设备的第二电压,计算第二电压与第一电压的电压差,并将电压差与第一预设电压进行比对,将第二电压与第二预设电压进行比对,在电压差小于第一预设电压,且第二电压大于等于第二预设电压的情况下,确认电机本体的供电设备处于高电量状态,否则,确认电机本体的供电设备处于低电量状态。
24.用于幼儿科学探索实验的智能调速吸尘器的调速系统,包括电机本体的供电设备,与电机本体相连,用于向电机本体供电;
25.控制器控制器,与电机本体的供电设备相连,用于采集电机本体的供电设备的电压,并根据采集得到的电压确定电机本体的供电设备的电量状态,在电机本体的供电设备
处于高电量状态的情况下,根据电机本体供电设备的电压确定电机本体的调速数据,其中,调速数据至少包括:全速运行时间、调速时间和pwm占空比;
26.脉宽调速设备脉宽调速设备,分别与控制器和电机本体相连,用于根据控制器的控制对电机本体进行调速;
27.其中,当采集得到的供电设备的电压为v时,确定供电设备的电量状态对应于高电量状态;
28.其中,电机本体调速系统还用于在预定的采集时间内连续多次检测电机本体的供电设备的电压;计算多次检测电机本体的供电设备的电压得到的多个电压的平均值,确认平均值为采集得到的电机本体的供电设备的电压;
29.其中,在电机本体动作的情况下,预定的采集时间为电机本体的动作开始时间和电机本体的动作结束时间,在电机本体未动作的情况下,采集时间为预设的采集周期时间,其中在电机本体的动作结束后,以电机本体的动作结束时间为预设的采集周期的起始时间;
30.其中,控制器控制器还用于在确定电机本体的调速数据之后,在全速运行时间内控制电机本体全速运行;在调速时内控制电机本体按照pwm占空比减速运行。
31.优选的,控制器控制器还用于将电机本体的供电设备的电压在调速数据库中进行匹配,确定电压所属的电压区间,获取与电压区间相对应的全速运行时间、调速时间和pwm占空比。
32.1、本发明的有益效果是:本发明中,在幼儿的实验过程中,实验用的吸尘器在实验的过程中,能够根据实验过程中的实际情况调节吸尘器的工作频率以及工作转速,如此便能够调节吸尘器在不同吸力作用下的吸取效果,从而给能够更好,更直观的将实验数据反馈给学员,帮助学员了解实验,而且在机器上还设置了供学员握紧的握把,如此学员在操作机器时更方便,更省力,并且也能够在一定程度上保证实验的安全性,保证学员的自身安全,该幼儿科学探索实验的智能调速吸尘器,以解决传统的吸尘器实验模型,只能够实现一种频率的工作速度,因为其只具有电机作为驱动器,电池作为供电器,而没有其他的部件,如此单一的结构,只能够满足一种转动速度,因此也只能够实验出一种实验数据结果,传统的吸尘器实验模型,结构单一,并且没有握把,在实验的过程中,只能够握住机身,这在实验过程中,是存在危险性的,特别是对于幼儿来说的技术问题。
附图说明
33.通过结合以下附图所作的详细描述,本发明的上述和/或其他方面的优点将变得更清楚和更容易理解,这些附图只是示意性的,并不限制本发明,其中:
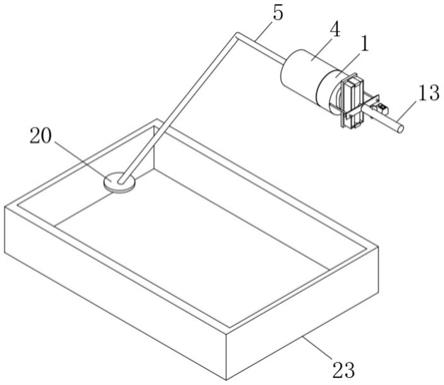
34.图1为本发明一种实施例的示意图;
35.图2为本发明一种实施例的右侧立体局部放大示意图;
36.图3为本发明一种实施例的左侧立体局部放大示意图;
37.图4为本发明一种实施例的调速系统的结构示意图;
38.图5为本发明一种实施例的调速方法的流程示意图;
39.图6为本发明一种实施例的可选的调速方法的流程示意图。
40.附图中,各标号所代表的部件列表如下:
41.1、安装套,2、电机本体,3、转动风扇,4、真空套管,5、连通管,6、连接短柱,7、安装板,8、卡板,9、电池盒,10、套杆,11、安装件一,12、安装件二,13、握把,14、卡件,15、器件外壳,16、控制器,17、脉宽调速设备,18、插销,19、插孔,20、端头,21、安装孔一,22、安装孔二,23、实验盒。
具体实施方式
42.在下文中,将参照附图描述本发明的用于幼儿科学探索实验的智能调速吸尘器的实施例。
43.在此记载的实施例为本发明的特定的具体实施方式,用于说明本发明的构思,均是解释性和示例性的,不应解释为对本发明实施方式及本发明范围的限制。除在此记载的实施例外,本领域技术人员还能够基于本技术权利要求书和说明书所公开的内容采用显而易见的其它技术方案,这些技术方案包括采用对在此记载的实施例的做出任何显而易见的替换和修改的技术方案。
44.本说明书的附图为示意图,辅助说明本发明的构思,示意性地表示各部分的形状及其相互关系。请注意,为了便于清楚地表现出本发明实施例的各部件的结构,各附图之间并未按照相同的比例绘制。相同的参考标记用于表示相同的部分。
45.图1-6示出本发明一种实施例的用于幼儿科学探索实验的智能调速吸尘器,包括安装套1:安装套1的内部嵌入式安装有电机本体2,电机本体2的输出轴固定安装有转动风扇3,安装套1的一侧插接有真空套管4,真空套管4的一侧连通有连通管5,安装套1的一侧固定连接有两个连接短柱6,两个连接短柱6的一端固定连接有供电设备,安装套1一侧的两端均固定连接有套杆10,两个套杆10的表面套接有安装件一11,安装件一11的一侧固定连接有套接在两个上套杆10的安装件二12,安装件二12的一侧固定连接有握把13,握把13的一侧设置有器件外壳15,器件外壳15顶部的一侧嵌入式安装有控制器16,器件外壳15顶部的一侧嵌入式安装有脉宽调速设备17,连通管5的一端连通有端头20,供电设备包括固定连接在两个连接短柱6上的安装板7,安装板7一侧的顶部和底部均固定连接有卡板8,两个卡板8之间卡接有电池盒9,电池盒9的内部安装有两个电池,连通管5的下方设置有实验盒23,安装件一11的两侧均开设有与套杆10适配的安装孔二22,安装件二12的两侧均开设有与套杆10适配的安装孔一21,器件外壳15的一侧固定连接有卡件14,卡件14卡套在握把13上,真空套管4的一侧固定连接有多个插销18,安装套1的一侧开设有多个与插销18适配的插孔19。
46.用于幼儿科学探索实验的智能调速吸尘器的调速方法,包括采集电机本体2的供电设备的电压;
47.根据采集得到的电压确定电机本体2的供电设备的电量状态;
48.在电机本体2的供电设备处于高电量状态的情况下,根据电机本体2的供电设备的电压确定电机本体2的调速数据,其中,调速数据至少包括:全速运行时间、调速时间和pwm占空比;
49.其中,当采集得到的供电设备的电压为6v时,确定供电设备的电量状态对应于高电量状态;
50.其中,采集电机本体2的供电设备的电压,包括:
51.在预定的采集时间内连续多次检测电机本体2的供电设备的电压;
52.计算多次检测电机本体2的供电设备的电压得到的多个电压的平均值,确认平均值为采集得到的电机本体2的供电设备的电压;
53.其中,在电机本体2动作的情况下,预定的采集时间为电机的动作开始时间和电机的动作结束时间,在电机本体2未动作的情况下,采集时间为预设的采集周期时间,其中在电机本体2的动作结束后,以电机本体2的动作结束时间为预设的采集周期的起始时间;
54.在确定电机本体2的调速数据之后,方法还包括:
55.在全速运行时间内控制电机本体2全速运行;
56.在调速时内控制电机本体2按照pwm占空比减速运行,根据电机本体2的供电设备的电压确定电机本体2的调速数据,包括:将电机本体2的供电设备的电压在调速数据库中进行匹配,确定电压所属的电压区间;获取与电压区间相对应的全速运行时间、调速时间和pwm占空比;其中,调速数据库用于保存多个预先设置的电压区间,以及每个电压区间相对应的调速数据,在根据电机本体2的供电设备的电压确定电机本体2的调速数据之后,方法还包括:电机本体2驱动目标装置在全速运行时间内按照预设的速度进行工作,并确定目标装置在调速时间内按照pwm占空比确定的运行速度进行工作,返回继续采集电机本体2的供电设备的电压,以根据采集到的新电压来确定新的调速数据,在电机本体2未动作的情况下,根据采集得到的电压确定电机本体2的供电设备的电量状态,包括:获取采集得到的电机本体2开始动作时电机本体2的供电设备的第一电压和电机本体2结束动作时电机本体2的供电设备的第二电压,计算第二电压与第一电压的电压差,并将电压差与第一预设电压进行比对,将第二电压与第二预设电压进行比对,在电压差小于第一预设电压,且第二电压大于等于第二预设电压的情况下,确认电机本体2的供电设备处于高电量状态,否则,确认电机本体2的供电设备处于低电量状态。
57.用于幼儿科学探索实验的智能调速吸尘器的调速系统,包括电机本体2的供电设备,与电机本体2相连,用于向电机本体2供电;
58.控制器控制器16,与电机本体2的供电设备相连,用于采集电机本体2的供电设备的电压,并根据采集得到的电压确定电机本体2的供电设备的电量状态,在电机本体2的供电设备处于高电量状态的情况下,根据电机本体2供电设备的电压确定电机本体2的调速数据,其中,调速数据至少包括:全速运行时间、调速时间和pwm占空比;
59.脉宽调速设备脉宽调速设备17,分别与控制器和电机本体2相连,用于根据控制器的控制对电机本体2进行调速;
60.其中,当采集得到的供电设备的电压为6v时,确定供电设备的电量状态对应于高电量状态;
61.其中,电机本体2调速系统还用于在预定的采集时间内连续多次检测电机本体2的供电设备的电压;计算多次检测电机本体2的供电设备的电压得到的多个电压的平均值,确认平均值为采集得到的电机本体2的供电设备的电压;
62.其中,在电机本体2动作的情况下,预定的采集时间为电机本体2的动作开始时间和电机本体2的动作结束时间,在电机本体2未动作的情况下,采集时间为预设的采集周期时间,其中在电机本体2的动作结束后,以电机本体2的动作结束时间为预设的采集周期的起始时间;
63.其中,控制器控制器16还用于在确定电机本体2的调速数据之后,在全速运行时间
内控制电机本体2全速运行;在调速时内控制电机本体2按照pwm占空比减速运行,控制器控制器16还用于将电机本体2的供电设备的电压在调速数据库中进行匹配,确定电压所属的电压区间,获取与电压区间相对应的全速运行时间、调速时间和pwm占空比。
64.工作原理:本发明在实际使用时,开启电机本体2带动转动风扇3转动,转动风扇3在真空套管4的内腔转动,通过转动风扇3的转动,使得真空套管4的内腔形成负压,从而通过连通管5和端头20将实验盒23内的实验物吸取,完成实验工作。
65.上述披露的各技术特征并不限于已披露的与其它特征的组合,本领域技术人员还可根据发明之目的进行各技术特征之间的其它组合,以实现本发明之目的为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。