1.本技术涉及工装技术领域,尤其是涉及一种工件定位治具。
背景技术:
2.随着社会技术的发展,车间生产的一些体力劳动逐渐由自动机械手进行作业,比如工件的抓取和放置。
3.一般自动机械手臂由预先设计的程序控制,依照既定的路线进行动作。当需要抓取的工件散乱堆放时,影响自动机械手臂的抓取效率。
技术实现要素:
4.为了改善目前工件定位工装不便于机器人自动取放效率低的问题,本技术提供一种工件定位治具。
5.本技术提供一种工件定位治具采用如下的技术方案:
6.一种工件定位治具,包括底板,所述底板上固设有呈矩形阵列分布的至少两组支撑组件,支撑组件能够将工件支撑离开底板;所述底板上设有退让孔,退让孔的数量与支撑组件一一对应;每组支撑组件包括至少两个支撑件,支撑件远离底板的一端开设有用于限制工件水平移动的容纳槽。
7.通过采用上述技术方案,将工件支撑放置于支撑件的容纳槽,工件上的杆状部位伸入到底板退让孔中。由于工件在底板上阵列分布,有利于机械手臂根据设定程序执行有序抓取作业,提高现场生产效率。
8.可选的,所述支撑件有四个并环绕退让孔均匀分布,相邻两个支撑件之间间隔一段距离。
9.通过采用上述技术方案,支撑件之间围成有用于工件存放的空腔,支撑件对工件的边缘进行支撑,在起到支撑作用的同时减少整体重量。相邻两个支撑件之间的距离也能用于机械手臂的夹爪从工件底部抓取,提高对机械手臂的适用范围。
10.可选的,所述支撑件与底板可拆卸固定。
11.通过采用上述技术方案,方便批量生产组装,当某个支撑件损坏时,可以进行更换。也可以根据工件的尺寸形状拆卸一些支撑件扩大支撑轮廓范围。
12.可选的,所述支撑件与底板通过螺栓连接。
13.通过采用上述技术方案,连接方式简单,螺栓可以通过专用的机械手完成,有利于组装。
14.可选的,所述底板固定连接有提手。
15.通过采用上述技术方案,提手有利于操作人员在需要时辅助转移工件定位治具进行握持。
16.可选的,所述提手与底板通过螺栓固定。
17.通过采用上述技术方案,螺栓固定使得提手损坏时方便更换。此外,当提手转移到
合适区域后,可以将提手拆卸下来,以减小提手对抓取机械手臂的干涉。
18.可选的,所述提手包括握持部和设置于握持部两端的固定部,所述固定部的端部设有螺纹孔;所述底板背离支撑件的一面设有沉头孔,底板通过穿设于沉头孔的螺栓与提手的螺纹孔配合固定。
19.通过采用上述技术方案,螺栓连接结构设计紧凑,保持底板位于提手周围的平整。
20.可选的,所述支撑件为截面呈l形的柱体,支撑件位于容纳槽远离底板一侧设有斜面。
21.通过采用上述技术方案,l形的支撑柱可以对长方体相邻两个棱边部位进行支撑,提高支撑稳固性。斜面使得放置工件时有一定导向作用,方便操作。
22.可选的,多个所述支撑组件在底板上呈矩形阵列分布或环形阵列分布。
23.通过采用上述技术方案,矩形阵列分布和环形阵列分布有利于底板的设计排版,此外,自动机械手臂的抓取更高效以及方便设计控制,减少抓取出现故障的可能。
24.综上所述,本技术包括以下至少一种有益技术效果:可以同时阵列码放多个工件,有利于现场自动机械手臂进行抓取作业,提高生产效率。
附图说明
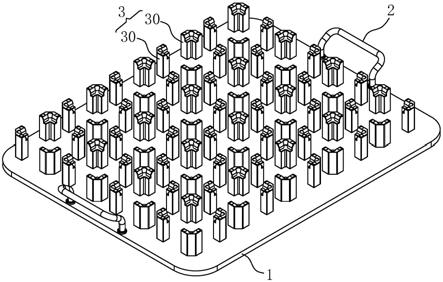
25.图1为本技术实施例工件定位治具的整体结构示意图;
26.图2为图1的俯视图;
27.图3为显示支撑件、提手与底板连接结构的爆炸图;
28.图4为显示底板结构的结构示意图;
29.图5为支撑件的整体结构示意图;
30.图6为图2中a-a面的剖视图。
31.附图标记说明:1、底板;11、退让孔;12、沉头孔;2、提手;21、螺纹孔;3、支撑组件;30、支撑件;301、容纳槽;302、固定孔;303、斜面;304、护角槽;4、夹持预留口;5、夹取预留间隙。
具体实施方式
32.以下结合附图1-6对本技术作进一步详细说明。
33.本技术实施例公开了一种工件定位治具。参考图1和图2,工件定位治具包括底板1和矩形阵列分布于底板1上的多组支撑组件3,每组支撑组件3包括至少两个支撑件30,底板1上对应每组支撑组件3开设有一个退让孔11。支撑件30将工件支撑离开底板1一段距离,退让孔11用于避让工件杆状结构。由于支撑组件3阵列分布,工件可以阵列存放于治具上并定位,有利于机械手臂根据设定程序精准地自动抓取工件,提高现场工件转移效率。
34.参考图1和图2,底板1可以为金属板或者塑料板。金属板可以采用铝合金板或者不锈钢板,塑料板可以采用pvc板或者亚克力板,根据需要也可以采用其他材质,此处采用铝合金板,质量较轻,方便搬运。底板1此处采用矩形板,根据需要也可以采用其他形状如圆形。
35.退让孔11有多个并在底板1上阵列分布,此处退让孔11呈5
×
4矩形阵列排布,退让孔11的数量和排布方式根据需要可以进行调整,退让孔11还可以呈环形阵列分布,此时支
撑组件3的排布方式适应性调整。退让孔11的孔径小于单个支撑组件3的轮廓外径的1/2,具体根据工件的尺寸适应性调整。为了减小工件部分插入退让孔11时过紧,退让孔11的直径可以比待插入工件部分的外径大2-3mm,退让孔11位于底板1所在面的周围倒角。
36.参考图3和图4,为了方便对治具进行人工辅助转移,底板1的相对两侧各固定有一个提手2,固定方式可以为螺栓固定或者焊接固定。此处选择螺栓固定,具体连接方式如下:底板1上远离支撑组件3的一面开设有贯穿性的沉头孔12,提手2呈u形,提手2包括握持部和设置于握持部两端的固定部,固定部的端部设有螺纹孔21,螺栓穿过沉头孔12后与提手2上的螺纹孔21螺纹连接,从而将提手2与底板1固定,方便提手2的拆卸更换。
37.参考图5,支撑件30整体为截面呈l形的柱体,支撑件30的截面形状还可以是直线型或者弧形,具体根据需要设置。支撑件30可以采用铝合金或者不锈钢制作。支撑件30的一端靠近阴角一侧设有容纳槽301,支撑件30位于容纳槽301所在部位的厚度为整体壁厚的2/3左右。支撑件30位于容纳槽301的侧壁端部设有固定孔302,固定孔302沿支撑件30的柱体长度方向贯穿设置,固定孔302可以为沉头孔,方便将支撑件30通过螺栓固定到底板1上。由于支撑件30可以拆卸,可以根据需要进行支撑件30的位置安装,以适应不同规格的工件支撑。为了方便工件放置支撑到容纳槽301中,支撑件30位于容纳槽301靠近固定孔302的侧壁顶部设置为斜面303,使得容纳槽301顶部的开口增大。
38.进一步的,为了使得长方体工件的棱角不易被磨损,支撑件30在阴角处开设有与容纳槽301连通的护角槽304,护角槽304也可以作为车加工支撑件30时的退刀槽。
39.参考图6,每组支撑组件3有四个支撑件30,四个支撑件30围绕中心的退让孔11环绕设置,此处四个支撑件30呈矩形分布,根据工件的形状,四个支撑件30也可以呈环形分布或者菱形分布等。在本技术实施例的其他实施方式中,每组支撑组件3包含的支撑件30数量也可以是2个、3个或者4个以上数量,具体根据实际设计需要。
40.为了方便机械手臂进行抓取,相邻两个支撑件30间隔一段距离形成夹持预留口4,以便机械手臂的夹爪能够伸入到支撑件30的下端。
41.此外,当多个工件放置后,为了使得机械手臂的夹爪不被相邻的工件干涉,相邻两个支撑组件3也间隔一段距离形成夹取预留间隙5。夹持预留口4和夹取预留间隙5的尺寸根据工件尺寸和实际夹爪的尺寸合理设置。
42.为了减小支撑件30对工件的接触磨损,支撑件30位于容纳槽301的表面可以固定一层软垫如橡胶垫。
43.该工件定位治具的使用方式如下:
44.操作人员预先将工件支撑在每个支撑组件3上码放整齐,然后连同治具一起放置于机械手臂工作区域,机械手臂在程序控制下依次对治具上的工件进行抓取,避免了操作工人一个个转移,提高了现场生产效率。现场可以使用多个工件定位治具配合使用,当工作区域上的工件在被抓取过程中,操作人员可以对备用的工件定位治具进行码放工件;当工作区域上的工件被抓取完毕时,可以更换另外码放整齐的工件定位治具,从而保持现场连续生产。
45.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。