技术特征:
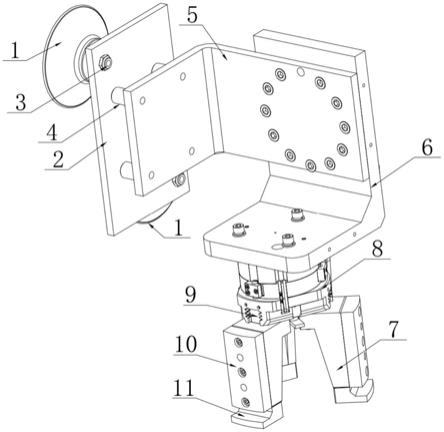
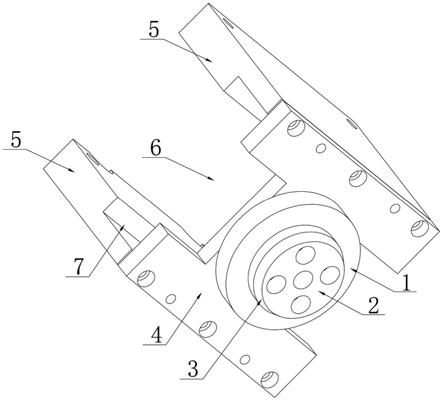
1.一种工件抓取机构,其特征在于,包括工件抓手及隔板抓手,所述工件抓手包括夹爪安装板(6)、设置在夹爪安装板(6)上的至少两个夹爪(7)及用于驱动夹爪动作夹持或松开工件(15)的动力机构,所述夹爪通过所述动力机构设置在所述夹爪安装板(6)上,所述隔板抓手包括至少一个吸盘(1),所述吸盘(1)通过盘安装板(5)安装在所述夹爪安装板(6)上。2.根据权利要求1所述的工件抓取机构,其特征在于,所述动力机构采用驱动气缸(8),所述驱动气缸上设有与所述夹爪数量对应的气缸滑块(9),所述夹爪对应与所述气缸滑块(9)连接。3.根据权利要求1所述的工件抓取机构,其特征在于,所述夹爪(7)上还设有防脱板(11)。4.根据权利要求1或2所述的工件抓取机构,其特征在于,所述夹爪(7)包括连接臂及夹持臂,所述连接臂与所述动力机构的驱动端连接,所述夹持臂上设有夹块(10)。5.根据权利要求1所述的工件抓取机构,其特征在于,所述吸盘(1)安装在盘底板(2)上,所述盘底板(2)通过支撑柱(4)与所述盘安装板(5)连接。6.根据权利要求1所述的工件抓取机构,其特征在于,所述吸盘(1)通过气路与真空发生器(12)连接。7.根据权利要求6所述的工件抓取机构,其特征在于,还包括真空过滤器(13),所述真空过滤器(13)设置在所述气路上。8.根据权利要求1所述的工件抓取机构,其特征在于,所述盘安装板(5)及夹爪安装板(6)分别为l型结构,分别为竖板及横板,所述盘安装板(5)的竖板横向设置在所述夹爪安装板(6)的竖板上。9.根据权利要求4所述的工件抓取机构,其特征在于,所述夹持臂的外表面为夹持面,所述夹块(10)设置在所述夹持面上。10.一种工件抓取装置,包括机器人(14),其特征在于,还包括如权利要求1-9任一项所述的工件抓取机构,所述工件抓取机构的夹爪安装板(6)与所述机器人(14)的操作臂连接。
技术总结
本实用新型涉及一种工件抓取机构及抓取装置,工件抓取机构包括工件抓手及隔板抓手,所述工件抓手包括夹爪安装板、至少两个夹爪及用于驱动夹爪动作夹持或松开工件的动力机构,所述夹爪通过所述动力机构设置在所述夹爪安装板上,所述隔板抓手包括至少一个吸盘,所述吸盘通过盘安装板安装在夹爪安装板上。抓取装置包括机器人及工件抓取机构,所述工件抓取机构与机器人的操作臂连接。本实用新型采用一套抓取机构两个抓手满足工件抓取码垛使用要求,结构简单,操作方便,只需要一个控制该抓取机构的机器人便可满足,节省成本,节省工作空间,能满足自动化生产线的高效率及高质量的要求,同时无需人工参与,降低人工成本,减少安全隐患。患。患。
技术研发人员:史雨来 林源涛 苑在铎 任鹏 于举辉
受保护的技术使用者:烟台艾迪精密机械股份有限公司
技术研发日:2021.12.09
技术公布日:2022/4/13
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。