1.本实用新型涉及一种夹爪辅助定位机构及抓取装置,属于液压马达自动化装配技术领域。
背景技术:
2.随着智能生产制造的普及,智能机器人也加快运用在智能制造当中,其中智能机器人想要实现运转成为智能制造的一环,抓取装置是必不可少的。
3.将抓取装置安装在智能机器人的操作臂上,可通过抓取装置抓取所需要的工件,才能实现在工件在不同工位上的转移,抓取装置会根据所要抓取的工件形状的不同以及作业环境的不同进行设计来满足使用要求。
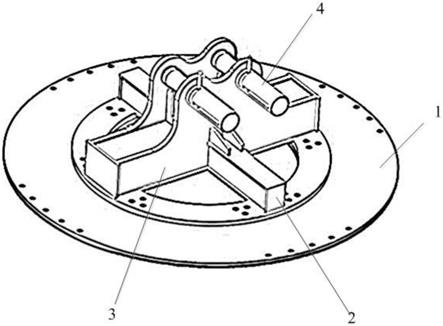
4.液压马达在装配过程中,其后法兰就需要通过抓取装置抓取后通过智能机器人进行转移至液压马达壳体位置进行安装,如图7所示,后法兰14包括盘体15,盘体的中部设有中心孔16,现有的抓取装置是采用两个夹爪,两夹爪在夹爪驱动机构的作用下动作夹住盘体,由于盘体为圆形结构,两个夹爪在夹取工件后法兰的盘体位置时,往往夹取位置容易偏移,导致后法兰的重心偏移,严重时工件会在转移过程滑落,存在会损坏产品,影响产品的装配效率及安全隐患的问题。
技术实现要素:
5.本实用新型针对现有技术存在的不足,提供一种结构简单,操作方便,不干涉夹爪的动作,同时改善抓取定位精度及定位稳定性的夹爪辅助定位机构及抓取装置。
6.本实用新型解决上述技术问题的技术方案如下:一种夹爪辅助定位机构,包括定位支架及定位块,所述定位支架上设有供夹爪往复运动的活动空间,所述定位块设置在所述定位支架的底部,所述定位块上设有与后法兰的中心孔相适配的定位插装部。
7.本实用新型的有益效果是:通过定位支架安装在抓取装置上,辅助定位机构预留了夹爪活动空间,不会影响或干涉夹爪的往复运动,可定位块的定位插装部的形状可以根据不同的工件进行更改,保证定位块与待夹持工件之间的配合精度,提高夹爪夹取定位精度及定位稳定性,保证工件夹持过程的稳定性,避免工件夹持过程出现滑落的情况。
8.在上述技术方案的基础上,本实用新型还可以做如下改进。
9.进一步的,所述定位块为阶梯状结构。
10.采用上述进一步方案的有益效果是,定位块的主体外径大于定位插装部的外径,不仅满足与工件的定位配合,同时保证定位块的安装稳定性。
11.进一步的,所述定位块上设有便于与后法兰的中心孔插装配合的锥形结构。
12.采用上述进一步方案的有益效果是,可对定位块与待夹持工件配合过程进行导向,利于定位块快速找准与工件配合位置,提高与工件的定位效率,同时确保与工件的配合精度。
13.进一步的,所述定位支架包括支撑板及一对连接板,所述定位块设置在所述支撑
板的中部,所述支撑板的两端分别与一对所述连接板连接,一对所述连接板及支撑板之间围成所述的活动空间。
14.采用上述进一步方案的有益效果是,定位块安装在支撑板上,一对连接板不仅保证了辅助定位机构的安装定位稳定性,同时为夹爪的往复运动预留活动空间,避免影响夹爪的夹取工件。
15.进一步的,所述连接板的内壁和/或所述支撑板的两侧上分别设有避让槽。
16.采用上述进一步方案的有益效果是,为夹爪的往复运动预留一定活动空间,避免夹爪来回运动时碰撞连接板或支撑板,延长辅助定位机构的使用寿命。
17.本实用新型还涉及一种抓取装置,包括两个夹爪及用于分别驱动两个所述夹爪伸缩动作的动力机构,还包括如上所述的夹爪辅助定位机构,所述夹爪辅助定位机构的连接板与所述动力机构连接。
18.本实用新型的有益效果是:在现有抓取装置的基础上增设辅助定位机构,夹爪在动力机构的作用下可用于抓取工件,在抓取时辅助定位机构的定位块能与工件的中心孔插装配合进行定位,保证抓取时工件的稳定性及抓取精度,从而满足工件转移稳定性及安全性的要求。
19.在上述技术方案的基础上,本实用新型还可以做如下改进。
20.进一步的,所述夹爪的夹持端的内壁上设有仿形夹块。
21.采用上述进一步方案的有益效果是,增大夹持时的接触面积,提高夹持力,使工件夹持的更加稳固,确保抓取工件的稳定性,仿形夹块可采用弹性或柔性材料,避免划伤被夹持工件。
22.进一步的,所述夹块采用弹性材料制作而成。
23.采用上述进一步方案的有益效果是,弹性材料制作的夹块能保护被夹持工件不会被划伤。
24.进一步的,所述夹爪的夹持端的端面上还设有用于对抓取工件进行限位的防脱板。
25.采用上述进一步方案的有益效果是,防脱板的内端长于夹爪的夹持端的内壁或夹块的内壁,可对所抓取工件后法兰的盘体作进一步限位,以避免工件出现掉落的现象,进一步保证工件抓取转移的稳定性及安全性。
26.进一步的,所述动力机构包括手指气缸,所述夹爪的连接端与所述手指气缸的气缸滑块连接。
27.采用上述进一步方案的有益效果是,动力采用手指气缸,合理利用抓取装置的有限安装空间,利用压缩空气作为动力来夹取或抓取马达的后法兰,实现后法兰稳定的转移,能有效地提高马达的生产效率及工作的安全性。
附图说明
28.图1为本实用新型夹爪辅助定位机构的主视结构示意图;
29.图2为本实用新型夹爪辅助定位机构的俯视结构示意图;
30.图3为本实用新型夹爪辅助定位机构的仰视结构示意图;
31.图4为本实用新型夹爪辅助定位机构的立体结构示意图;
32.图5为本实用新型抓取装置的结构示意图;
33.图6为本实用新型抓取装置的夹持工件状态的结构示意图;
34.图7为本实用新型后法兰的结构示意图;
35.图中,1、定位块;2、定位插装部;3、锥形结构;4、支撑板;5、连接板;6、活动空间;7、避让槽;8、夹爪;9、气缸;10、气缸滑块;11、夹块;12、防脱板;13、安装板;14、后法兰;15、盘体;16、中心孔。
具体实施方式
36.以下结合实例对本实用新型的原理和特征进行描述,所举实例只用于解释本实用新型,并非用于限定本实用新型的范围。
37.如图1-图4所示,一种夹爪8辅助定位机构,包括定位支架及定位块1,所述定位支架上设有供夹爪8往复运动的活动空间6,所述定位块1设置在所述定位支架的底部,所述定位块1上设有与后法兰14的中心孔16相适配的定位插装部2。
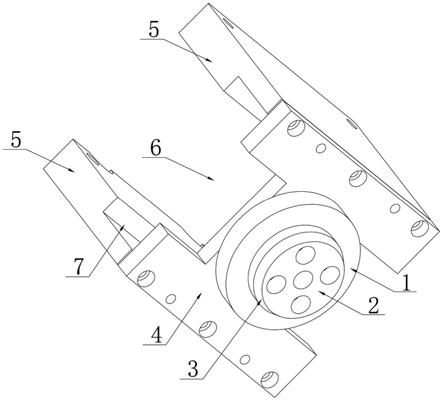
38.所述定位块1为阶梯状结构。定位块1的主体外径大于定位插装部2的外径,不仅满足与工件的定位配合,同时保证定位块1的安装稳定性。
39.所述定位块1上设有便于与后法兰14的中心孔16插装配合的锥形结构3。可对定位块1与待夹持工件配合过程进行导向,利于定位块1快速找准与工件配合位置,提高与工件的定位效率,同时确保与工件的配合精度。
40.所述定位支架包括支撑板4及一对连接板5,所述定位块1设置在所述支撑板4的中部,所述支撑板4的两端分别与一对所述连接板5连接,一对所述连接板5及支撑板4之间围成所述的活动空间6。定位块1安装在支撑板4上,一对连接板5不仅保证了辅助定位机构的安装定位稳定性,同时为夹爪8的往复运动预留活动空间6,避免影响夹爪8的夹取工件。
41.所述连接板5的内壁和/或所述支撑板4的两侧上分别设有避让槽7。为夹爪8的往复运动预留一定活动空间6,避免夹爪8来回运动时碰撞连接板5或支撑板4,延长辅助定位机构的使用寿命。
42.如图5和图6所示,本实用新型还涉及一种抓取装置,包括两个夹爪8及用于分别驱动两个所述夹爪8伸缩动作的动力机构,还包括如上所述的夹爪8辅助定位机构,所述夹爪8辅助定位机构的连接板5与所述动力机构连接。
43.所述夹爪8的夹持端的内壁上设有仿形夹块11。增大夹持时的接触面积,提高夹持力,使工件夹持的更加稳固,确保抓取工件的稳定性,仿形夹块11可采用弹性或柔性材料,避免划伤被夹持工件。
44.所述夹块11采用弹性材料制作而成。弹性材料制作的夹块11能保护被夹持工件不会被划伤。
45.所述夹爪8的夹持端的端面上还设有用于对抓取工件进行限位的防脱板12。防脱板12的内端长于夹爪8的夹持端的内壁或夹块11的内壁,可对所抓取工件后法兰14的盘体15作进一步限位,以避免工件出现掉落的现象,进一步保证工件抓取转移的稳定性及安全性。
46.所述动力机构包括手指气缸9,所述夹爪8的连接端与所述手指气缸的气缸滑块10连接。动力采用手指气缸,手指气缸上有两个平行气缸滑块10,夹爪8分别对应与气缸滑块
10连接。
47.气缸通过安装板13与机器人的操作臂连接,便可以通过机器人驱动抓取装置实现工件的抓取及转移,在现有抓取装置的基础上增设辅助定位机构,辅助定位机构预留了夹爪8活动空间6,不会影响或干涉夹爪8的往复运动,可定位块1的定位插装部2的形状可以根据不同的工件进行更改,保证定位块1与待夹持工件之间的配合精度,提高夹爪8夹取定位精度及定位稳定性,保证工件夹持过程的稳定性,避免工件夹持过程出现滑落的情况。
48.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。