1.本公开涉及医疗臂系统、臂装置和主/从系统的致动方法。
背景技术:
2.最近,已经提出了使用主/从型操作机器人的操作。例如,作为主/从型操作机器人的示例,存在臂型医疗保持装置,其中诸如相机头和前斜视内窥镜的医疗光学设备能够绕光轴独立地旋转(见专利文献1)。
3.引文列表
4.专利文献
5.专利文献1:jp 2019-84334 a
技术实现要素:
6.技术问题
7.然而,在像上述传统技术那样通过关节部分在从侧连接多个连杆以用作一个臂的情况下,由于关节部分的支撑点和动作点彼此远离,因此难以提高臂的刚性。
8.因此,本公开提出了一种医疗臂系统、臂装置和主/从系统的致动方法,其通过不同于传统臂的结构来增强臂的刚性。
9.问题的解决方案
10.根据本公开,一种医疗臂系统,包括:由操作者操作的操作装置;以及响应于操作者对操作装置的操作而被远程操作的臂装置,其中,该臂装置具有基座,连接到基座的第一单元,连接到第一单元的第二单元,连接到基座并支撑第二单元的万向节,以及连接到第二单元并设置有手术工具以接触患者的端部执行器单元,第一单元相对于基座在至少一个轴的方向上移动第二单元,并且第二单元在由万向节支撑的状态下与第一单元联动并在至少一个轴的方向上移动端部执行器单元。
11.此外,根据本公开,一种臂装置,包括:基座;连接到基座的第一单元;连接到第一单元的第二单元;连接到基座并支撑第二单元的万向节;以及连接到第二单元并设置有端部执行器以作用于对象物的端部执行器单元,其中,第一单元相对于基座在至少一个轴的方向上移动第二单元,并且第二单元在由万向节支撑的状态下与第一单元联动并在至少一个轴的方向上移动端部执行器单元。
附图说明
12.图1是用于描述根据本公开的第一实施例的医疗臂系统的概要的示意图。
13.图2是示出根据第一实施例的从装置的外部配置示例的示意图。
14.图3是根据第一实施例的从装置的部分放大图。
15.图4是示出根据第一实施例的从装置的端部执行器单元的动作的示例的说明图。
16.图5是示出根据第一实施例的从装置的端部执行器单元的远端处的手术工具的动
作的示例的说明图。
17.图6是示出根据第一实施例的从装置的动作示例的说明图。
18.图7a是示出耦接到第一电动机的输入侧绞盘的半径与第一单元的输出侧绞盘的半径之间的关系的概念图。
19.图7b是包括耦接到第一电动机的输入侧绞盘和第一单元的输出侧绞盘的部分的放大图。
20.图8a是示出耦接到第二电动机的输入侧绞盘的半径与第二单元的输出侧绞盘的半径之间的关系的概念图。
21.图8b是包括耦接到第二电动机的输入侧绞盘和第二单元的输出侧绞盘的部分的放大图。
22.图9是示出根据修改示例1的从装置的外部配置示例的示意图。
23.图10a是根据修改示例1的从装置的顶视图。
24.图10b是根据修改示例1的从装置的侧视图。
25.图10c是根据修改示例1的从装置的后视图。
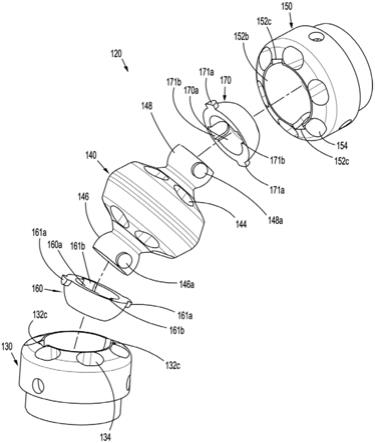
26.图11是示出根据修改示例2的从装置的外部配置示例的示意图。
27.图12a是示出根据修改示例2的在从装置的滑动基座上放置端部执行器单元的状态的说明图。
28.图12b是示出根据修改示例2的从装置的滑动基座的布置的说明图。
29.图13a是根据修改示例2的从装置的顶视图。
30.图13b是根据修改示例2的从装置的侧视图。
31.图13c是根据修改示例2的从装置的后视图。
32.图14是示出根据修改示例3的从装置的外部配置示例的示意图。
33.图15是用于描述根据本公开的第二实施例的医疗臂系统的概要的示意图。
34.图16a是示出根据第二实施例的从装置的外部配置示例的示意图。
35.图16b是用于描述根据第二实施例的从装置的第一缆线减速器的说明图。
36.图16c是用于描述根据第二实施例的从装置的第二缆线减速器的说明图。
37.图16d是用于描述根据第二实施例的从装置的滑动机构的说明图。
38.图17a是根据第二实施例的从装置的第一透视图。
39.图17b是根据第二实施例的从装置的第二透视图。
40.图17c是根据第二实施例的从装置的第三透视图。
41.图17d是根据第二实施例的从装置的第四透视图。
42.图17e是根据第二实施例的从装置的侧视图。
43.图18a是并列使用根据第二实施例的两个从装置的情况的后视图。
44.图18b是并列使用根据第二实施例的两个从装置的情况的第一透视图。
45.图18c是并列使用根据第二实施例的两个从装置的情况的第二透视图。
46.图18d是并列使用根据第二实施例的两个从装置的情况的侧视图。
47.图18e是并列使用根据第二实施例的两个从装置的情况的顶视图。
具体实施方式
48.在下文中,将基于附图详细描述本公开的实施例。在以下实施例中,相同的部分由相同的参考符号表示,以省略冗余的描述。
49.此外,根据下面所示的项目的顺序来描述本公开。
50.1.第一实施例
51.1.1.医疗臂系统的概要
52.1.1.1.主装置的概要
53.1.1.2.从装置的概要
54.1.2.从装置的详细信息
55.1.2.1.从装置的外部配置示例
56.1.2.2.从装置的动作示例
57.1.3.修改示例
58.1.3.1.修改示例1
59.1.3.2.修改示例2
60.1.3.3.修改示例3
61.2.第二实施例
62.2.1.医疗臂系统的概要
63.2.2.从装置的详细信息
64.3.结论
65.1.第一实施例
66.首先,下面将参考附图详细描述根据本公开的第一实施例的医疗臂系统。注意,在下文中,以主/从型的医疗机器人系统作为示例来描述根据本公开的第一实施例的医疗臂系统。
67.1.1.医疗臂系统的概要
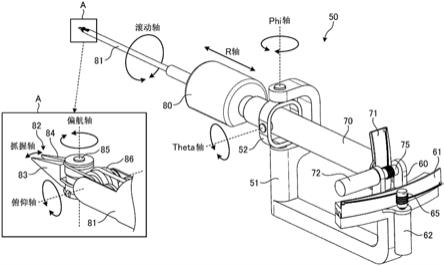
68.图1是用于描述根据第一实施例的医疗臂系统1的概要的示意图。如图1所示,医疗臂系统1设置有主装置10(10r和10l)和从装置50。主装置10是设置有由诸如医生的操作者(以下,也称为用户)操作的输入接口的装置。从装置50是设置有根据主装置10的用户执行的操作而远程操作的诸如钳子或镊子的医疗手术工具的装置。
69.作为示例,医疗臂系统1采用双边控制。双边控制是与主装置10的输入接口和从装置50的手术工具之间的位置和力的状态相匹配的反馈控制。换句话说,双边控制是以任意缩放比率匹配主装置和从装置的位置和力的状态的控制,并且还起到将用户施加到主装置的力和位置变化传递到对象的作用。例如,当用户操作输入接口时,手术工具根据该操作而移动。当手术工具移动并接触患者时,接触时的力反馈到输入接口。
70.注意,主装置10和从装置50通过任意通信方法相互连接。例如,主装置10和从装置50通过有线通信或无线通信相互连接。此外,例如,主装置10和从装置50可以被配置为直接执行通信,或者可以被配置为经由网络(或另一装置)执行通信。
71.1.1.1.主装置的概要
72.主装置10是具有执行从装置50的驱动控制和将由从装置50的传感器测量的振动信号(第一信号)等呈现给用户的功能的信息处理装置。
73.如图1所示,主装置10设置有由用户握持和操作的操作装置100(100r和100l)。操作装置100对应于将从装置50的手术工具接触患者的患处等时产生的感觉传输给用户的信息处理装置。此外,显示术野的监视器30连接到主装置10,并且主装置10设置有支撑基座32,用户的臂或肘放置在支撑基座上。注意,主装置10包括用于右手的主装置10r和用于左手的主装置10l。此外,用于右手的主装置10r设置有用于右手的操作装置100r,并且用于左手的主装置10l设置有用于左手的操作装置100l。
74.用户将他/她的臂或肘放置在支撑基座32上,并用右手和左手分别握住操作装置100r和100l。在该状态下,用户在观看显示术野的监视器30的同时操作操作装置100r和100l。用户可以通过移动各个操作装置100r和100l的位置和方向来远程操作附接到从装置50的手术工具的位置或方向,或者执行各个手术工具的保持动作。
75.1.1.2.从装置的概要
76.从装置50具有由诸如电动机的致动器驱动的机构,并且响应于来自主装置10的驱动控制而移动。从装置50是具有向主装置10呈现力和振动的功能的臂装置,该力和振动是在手术中患者的患处(以下,也将被称为对象)和从装置50的一部分(其要接触对象)彼此接触时产生的。
77.在从装置50中,接触对象的臂部81设置有各种传感器(例如,原点位置传感器、限位传感器、编码器、麦克风、加速度传感器等)。另外,从装置50的臂部81设置有力传感器。力传感器测量当位于臂部81远端的手术工具接触患者时施加到臂部81的力。注意,上述各种传感器的设置位置没有特别限制,并且各种传感器可以设置在臂部81的任意位置。
78.例如,从装置50具有位移传感器,其用于测量在相应位置处的可移动部分的移动(换句话说,可移动部分的位置的位移)。上述位移传感器的示例包括电位器、编码器等。此外,例如,从装置50具有驱动机构,其用于在与可移动部分对应的位置处驱动上述可移动部分。上述驱动机构的示例包括电动机、其驱动器等。
79.1.2.从装置的详细信息
80.在下文中,将参考图2至图8b更详细地描述根据第一实施例的从装置50。
81.1.2.1.从装置的外部配置示例
82.首先,将参考图2和图3描述从装置50的外部配置示例。图2是示出根据第一实施例的从装置的外部配置示例的示意图。图3是根据第一实施例的从装置的部分放大图。
83.如图2所示,从装置50设置有基座51、万向节52、第一单元60、第一缆线减速器61、第一电动机62、第二单元70、第二缆线减速器71、第二电动机72和端部执行器单元80。
84.万向节52和第一单元60连接到基座51。第二单元70连接到第一单元60。第二单元70是长部分,由万向节52支撑,其执行两个轴的旋转支撑,并由布置在远离万向节52的旋转中心的位置处的第二电动机72和第一电动机62执行极坐标系中的两个自由度的动作。
85.在本实施例中,通过经由第一缆线减速器61第一电动机62旋转,第一单元60与第二单元70一起围绕万向节52的phi轴执行弧形运动。另外,通过经由第二缆线减速器71第二电动机72旋转,第二单元70绕万向节52的theta轴执行弧形运动。第一缆线减速器61和第二缆线减速器71中的每一个通过使用至少一根缆线(导线)来执行减速。此外,如图2所示,万向节52具有中空的中心,并且具有分别在phi轴方向和theta轴方向上双重支撑的形状(中心中空形状)。
86.这里,图3所示的弧形引导件64是弧形状的引导部分,并且第一单元60可以利用该弧形引导件平滑地执行绕万向节52的phi轴的弧形运动。第一单元60的一部分还用为第一缆线减速器61的输出侧绞盘,并且响应于来自固定到基座51的第一电动机62的扭矩而起作用。此外,耦接到第一电动机62的动力传输部分65用作输入侧绞盘。
87.与第一单元60一样,第二单元70的一侧的端(第一端)也用作第二缆线减速器71的输出侧绞盘,并且响应于来自固定到第一单元60的第二电动机72的扭矩而起作用。此外,耦接到第二电动机72的动力传输部分75用作输入侧绞盘。
88.如图3所示,第二单元70的输出侧绞盘(第二缆线减速器71)的两个边缘相对于第一单元60的右/左抖动由固定到第一单元60的凸轮从动件63来调节,从而只能执行绕theta轴的弧形运动。凸轮从动件63是装有轴的轴承,该轴承具有厚的外圈并具有高刚性,其中内置有被称为针的滚针。
89.在从装置50中,对于phi轴和theta轴使用缆线减速器(第一缆线减速器61和第二缆线减速器71)是实现无侧隙和提高后驱动性的有效手段。当然,也可以使用齿轮传动。
90.此外,根据第一实施例的从装置50可以通过将端部执行器单元80附接到第二单元70的另一端(第二端)来实现如图2所示的7轴驱动。
91.端部执行器单元80是手术工具单元,相对于第二单元70在长轴方向上执行滑动运动,并绕第二单元70的长轴执行滚动轴旋转。例如,如图4的步骤s12至步骤s14所示,端部执行器单元80在r轴方向上延伸90mm,并且如步骤s14至步骤s16所示,在滚动轴的旋转方向上旋转90度。注意,诸如图4中所示的角度的数值表示相对于初始状态(基准位置)的变化量。
92.此外,如图2所示,根据第一实施例的从装置50可以利用端部执行器单元80的臂部81的远端部分a执行偏航轴/俯仰轴/抓握轴的3轴运动。在本实施例中,端部执行器单元80的臂部81的远端部分a设置有抓握器82,作为作用在对象上的端部执行器的示例,抓握器82可以用作诸如钳子或镊子的手术工具。抓握器82由第一叶片83、第二叶片84、第一旋转轴85和第二旋转轴86形成。例如,图5的步骤s20中所示的状态是抓握器82的初始状态。如图5的步骤s20至步骤s21和/或步骤s22至步骤s23所示,第一叶片83、第二叶片84和第一旋转轴85的整体在偏航轴的旋转方向上移动(在这种情况下,为90度),同时第二旋转轴86用作支撑点。此外,如图5的步骤s20至步骤s22和/或步骤s21至步骤s23所示,第一叶片83和第二叶片84的整体在俯仰轴的旋转方向上移动(在这种情况下,为100度),同时第一旋转轴85用作支撑点。此外,即使在如图5的步骤s20至步骤s24所示的抓握器82已经在俯仰轴的旋转方向上移动(在这种情况下,移动30度)的状态下,如图5的步骤s24至步骤s25所示,第一叶片83和第二叶片84在抓握轴的旋转方向上打开/关闭,同时第一旋转轴85用作支撑点。当然,也可以执行反方向的动作,例如,恢复原状的动作。注意,诸如图5中所示的角度的数值表示相对于初始状态(基准位置)的变化量。
93.关于偏航轴、俯仰轴和抓握轴,例如,通过将布置在端部执行器单元80的根部(在第二单元70侧)的多个致动器的力通过线缆绳传递到设置在臂部81的远端部分a处的抓握器82来执行动作。
94.1.2.2.从装置的动作示例
95.接下来,将参考图6至图8b描述从装置50的动作示例。图6是示出根据第一实施例的从装置50的动作示例的说明图。图6示出了当执行在phi轴(join1=j1)和theta轴(join2
=j2)中的极坐标系动作(弧形运动)时,从装置50的机构的状态。注意,诸如图6中所示的角度的数值表示相对于初始状态(基准位置)的变化量。假设在图6的步骤s30中示出的状态(j1=0度,j2=0度)是用作参考的从装置50的初始状态。当在步骤s30所示的状态下沿phi轴的旋转方向移动15度时,获得步骤s31所示的状态(j1=15度,j2=0度)。当在步骤s31所示的状态下沿theta轴的旋转方向移动-10度时,获得步骤s32所示的状态(j1=15,j2=-10度)。当在步骤s32所示的状态下沿phi轴的旋转方向移动-15度时,获得步骤s33所示的状态(j1=0,j2=-10度)。当在步骤s33所示的状态下沿phi轴的旋转方向移动-15度时,获得步骤s34所示的状态(j1=-15度,j2=-10度)。当在步骤s34所示的状态下沿theta轴的旋转方向移动10度时,获得步骤s35所示的状态(j1=-15度,j2=0度)。当在步骤s35所示的状态下沿theta轴的旋转方向移动10度时,获得步骤s36所示的状态(j1=-15度,j2=10度)。当在步骤s36所示的状态下沿phi轴的旋转方向移动15度时,获得步骤s37所示的状态(j1=0,j2=10度)。当在步骤s37所示的状态下沿phi轴的旋转方向移动-15度时,获得步骤s38所示的状态(j1=-15度,j2=10度)。注意,在步骤s38所示的状态下,当沿phi轴的旋转方向移动30度并且沿theta轴的旋转方向移动-10度时,获得步骤s31所示的状态(j1=15度,j2=0度)。此外,当在作为初始状态的步骤s30中所示的状态下沿phi轴的旋转方向移动-15度时,获得步骤s35中所示的状态(j1=-15度,j2=0度)。当在步骤s30所示的状态下沿theta轴的旋转方向移动-10度时,获得步骤s33所示的状态(j1=0,j2=-10度)。当在步骤s30所示的状态下沿theta轴的旋转方向移动10度时,获得步骤s37所示的状态(j1=0,j2=10度)。当然,也可以执行反方向的动作,例如,恢复至初始状态的动作。如图6所示,根据第一实施例的从装置50可以实现极坐标下的动作,而不会在phi轴上的动作和theta轴上的动作之间干扰。
96.图7a和图7b是示出根据第一实施例的从装置50的phi轴(joint1=j1)中的减速比的说明图。图7a是示出耦接到第一电动机62的输入侧绞盘的半径r
j1
与第一单元60的输出侧绞盘的半径r
j1
之间的关系的概念图。图7b是包括耦接到第一电动机62的输入侧绞盘和第一单元60的输出侧绞盘的部分的放大图。通过使用耦接到第一电动机62的输入侧绞盘的半径r
j1
和第一单元60的输出侧绞盘的半径r
j1
,通过r
j1
/r
j1
(=2πr
j1
/2πr
j1
)获得phi轴上的减速比。
97.图8a和图8b是示出根据第一实施例的从装置50的theta轴(joint2=j2)中的减速比的说明图。图8a是示出耦接到第二电动机72的输入侧绞盘的半径r
j2
与第二单元70的输出侧绞盘的半径r
j2
之间的关系的概念图。图8b是包括耦接到第二电动机72的输入侧绞盘和第二单元70的输出侧绞盘的部分的放大图。通过使用耦接到第二电动机72的输入侧绞盘的半径r
j2
和第二单元70的输出侧绞盘的半径r
j2
,通过r
j2
/r
j2
(=2πr
j2
/2πr
j2
)获得theta轴上的减速比。
98.如上所述,根据第一实施例的从装置50是具有桨机构的臂装置,该桨机构具有极坐标类型的自由度的构造,并且绕支持在两个轴上旋转的万向节52在phi轴和theta轴上执行极坐标系统动作。具体地,根据第一实施例的从装置50总共包括七个轴,即,在phi轴、theta轴和r轴上的手术工具位置改变动作的三个轴,在偏航轴、俯仰轴和滚动轴上的手术工具旋转动作的三个轴,以及在抓握轴上的手术工具打开/关闭动作的一个轴。构成手术工具位置改变动作的三个轴的机构被称为桨机构,远端的三个自由度(偏航轴、俯仰轴和抓握轴上的动作)由线牵引机构实现。另外,也可以执行r轴和偏航轴的平行驱动。
99.上述构成手术工具位置改变动作的三个轴的机构被称为桨机构的原因是,将扭矩施加到围绕万向节52的长机构的端部并在phi轴和theta轴上执行极坐标系统动作的行为类似于船桨的运动。在该桨机构中,由于在远离旋转中心的位置施加力,因此即使使用缆线减速器也可以获得高减速比(高输出),并且即使使用刚性相对较低的线驱动也可以确保高刚性(高刚性)。此外,由于该机构无侧隙并且具有高的后驱动性,该机构有效实现平滑和精细定位动作(高精度)。此外,由于机构的重心附近由万向节52支撑,因此可以减小电动机所需的重力补偿扭矩(重力补偿)。
100.具体地,根据第一实施例的从装置50具有由旋转基座(万向节52)支撑的第二单元70,并且可以在phi轴和theta轴上执行两个自由度的动作(在两个轴上的手术工具位置改变动作)。第二单元70连接到第一单元60。第一单元60沿着围绕phi轴的弧形轨迹作用。第二单元70从第一单元60获得绕phi轴的旋转动力,并在phi轴上执行动作。此外,除了phi轴动作之外,第二单元70获得绕theta轴的旋转动力并执行theta轴动作。结果,第二单元70执行phi轴动作和theta轴动作的两轴手术工具位置改变动作。
101.第二单元70连接到/配备有端部执行器单元80。端部执行器单元80可以执行r轴动作(在长轴方向上的滑动运动),其使得能够在第二单元70的纵向上相对于第二单元70向前/向后移动,并且执行滚动轴动作(绕长轴的旋转运动),其使得能够围绕第二单元70的纵向轴旋转。r轴动作是手术工具位置改变动作,并且滚轴动作是手术工具旋转动作。还可以在端部执行器单元80中执行r轴动作和滚动轴动作。此外,在实践中,可以通过第二单元70的至少一部分的伸缩/滑动运动来实现r轴动作。类似地,可以通过第二单元70的至少一部分绕长轴的旋转运动来实现滚动轴动作。设置在端部执行器单元80的臂部81的远端的抓握器82可以在俯仰轴和偏航轴的两个轴上执行手术工具旋转动作,并且在夹持轴上执行手术工具打开/关闭动作。
102.1.3.修改示例
103.接下来,将参照图9至图14描述根据本公开的第一实施例的从装置50的修改示例。图9至图10c是用于描述根据修改示例1的从装置50a的图。图11至图13c是用于描述根据修改示例2的从装置50b的图。图14是用于描述根据修改示例3的从装置50c的图。
104.1.3.1.修改示例1
105.图9是示出根据修改示例1的从装置50a的外部配置示例的示意图。图10a是根据修改示例1的从装置50a的顶视图。图10b是根据修改示例1的从装置50a的侧视图。图10c是根据修改示例1的从装置50a的后视图。如图9和图10a图10c所示,万向节52a可以是在phi轴方向上的悬臂,并且在theta轴方向上具有双支撑形状(u形)。此外,相反,万向节52a可以在phi轴方向上被双支撑,并且在theta轴方向上具有悬臂形状(横向u形(c形))。此外,由于第二缆线减速器71从第二单元70a的长轴横向移动,所以端部执行器单元80a可以从第二单元70a的后方连接。在这种情况下,由于第二单元70a和端部执行器单元80a的重心位置变得远离万向节52a,所以第一电动机62和第二电动机72上的负载增加。然而,由于不需要将抓握器82的驱动机构布置在臂部81的远端附近,因此该结构不易干扰工作对象。
106.1.3.2.修改示例2
107.图11是示出根据修改示例2的从装置50b外部配置示例的示意图。图12a是示出根据修改示例2的在从装置的滑动基座上放置端部执行器单元的状态的说明图。图12b是示出
根据修改示例2的从装置的滑动基座的布置的说明图。图13a是根据修改示例2的从装置50b的顶视图。图13b是根据修改示例2的从装置50b的侧视图。图13c是根据修改示例2的从装置50b的后视图。如图11至图13c所示,由于万向节52b被配置为沿phi轴方向具有悬臂形状(u形状),所以第二单元70b的上部可以被配置为处于开放状态。此外,如图12a和图12b所示,在上部开放的位置处布置有在r轴方向上可移动的滑动基座73,并且端部执行器单元80b被配置为放置在滑动基座73上。根据修改示例2的从装置50b能够将万向节后侧配置为与修改示例1一样紧凑,并且与修改示例1相比,根据修改示例2的从装置50b能够将重心位置布置得更靠近万向节。
108.1.3.3.修改示例3
109.图14是示出根据修改示例3的从装置50c外部配置示例的示意图。如图14所示,万向节52c可以在phi轴和theta轴上都具有悬臂结构(l形)。在图14中,省略了端部执行器单元80的图示。图14所示的第二单元70c的形状可以与第一实施例的第二单元70、修改示例1的第二单元70a或修改示例2的第二单元70b的形状相同。
110.2.第二实施例
111.接下来,下面将参考附图详细描述根据本公开的第二实施例的医疗臂系统。根据第二实施例的医疗臂系统1对应于根据第一实施例的医疗臂系统1的示例。注意,在下文中,以主/从型的医疗机器人系统作为示例来描述根据第二实施例的医疗臂系统。
112.2.1.医疗臂系统的概要
113.图15是用于描述根据第二实施例的医疗臂系统1的概要的示意图。如图15所示,医疗臂系统1设置有主装置10和从装置50(50r和50l)。主装置10具有用于右手的操作装置100r和用于左手的操作装置100l。另外,作为从装置50,设置两个装置,即,用于右手的从装置50r和用于左手的从装置50l。从装置50r和50l分别对应于操作装置100r和100l。虽然省略了图示,但是与图1一样,显示术野的监视器30连接到主装置10。
114.作为示例,医疗臂系统1采用双边控制。注意,主装置10和从装置50通过任意通信方法相互连接。例如,主装置10和从装置50通过有线通信或无线通信相互连接。此外,例如,主装置10和从装置50可以被配置为直接执行通信,或者可以被配置为经由网络(或另一装置)执行通信。
115.用户分别用右手和左手抓握操作装置100r和100l。在该状态下,用户在观看显示术野的监视器30的同时操作操作装置100r和100l。用户可以通过移动各个操作装置100r和100l的位置和方向来远程操作附接到从装置50r和50l的手术工具的位置或方向,或者执行各个手术工具的保持动作。
116.2.2.从装置的详细信息
117.在下文中,将参考图16a至图18e更详细地描述根据第二实施例的从装置50。图16a是示出根据第二实施例的从装置50的外部配置示例的示意图。图16b是用于描述根据第二实施例的从装置50的第一缆线减速器61的说明图。图16c是用于描述根据第二实施例的从装置50的第二缆线减速器71的说明图。图16d是用于描述根据第二实施例的从装置50的滑动机构90的说明图。
118.如图16a所示,在根据第二实施例的从装置50中,基座51、第一单元60、第一缆线减速器61、第一电动机62、第二单元70、第二缆线减速器71、第二电动机72和端部执行器单元
80中的每一个在每个单元中被外部覆盖。万向节52从外部的外侧支撑第二单元70。根据第二实施例的从装置50的整个配置基本上与根据第一实施例的从装置50的配置相似。
119.如图16b和图16c所示,可以通过使用两根或更多根缆线来提高每一个缆线减速器的刚性,例如绕phi轴的弧形运动中使用的第一缆线减速器61和绕theta轴的弧形运动中使用的第二缆线减速器71。此外,如图16b和图16c所示,通过反转输入侧绞盘上的两根缆线的缠绕方向(动力传输部分65、75)的方向,可以减小作用在输入侧绞盘上的缆线的力矩。缆线优选地绕输入侧绞盘多次缠绕,并且可以通过焊接等固定缠绕部分的一部分,以便不引起相对于输入侧绞盘的位移。为了提高每一个缆线减速器的刚性,优选的是通过螺旋弹簧等配置一定的张力作用在缆线上。
120.如图16d所示,通过在第二单元70和端部执行器单元80之间设置执行直线运动的滚珠丝杠等滑动机构90,端部执行器单元80也能够在r轴方向上执行滑动运动。在图16d所示的示例中,滑动机构90设置在第二单元70的外部。
121.注意,作为使根据第二实施例的从装置50绕phi轴、theta轴、滚动轴、俯仰轴、偏航轴和抓握轴的轴执行旋转动作的致动器,除了电磁旋转电动机之外,还可以使用利用压电元件的旋转型超声波电动机、油压旋转电动机、静电电动机等。
122.此外,作为用于使端部执行器单元80在r轴方向上执行滑动运动的致动器,除了电磁旋转电动机之外,还可以使用利用压电元件的旋转型超声波电动机、油液旋转电动机、静电电动机、使用压电元件的直接超声波电动机、油压直接致动器(动力缸)、聚合物致动器、音圈、电磁线性电动机等。
123.此外,上述致动器中的每一个可以设置有位置检测设备和/或紧急停止制动器,例如齿轮型减速器、谐波齿轮减速器、行星齿轮减速器、悖论行星齿轮减速器、缆线减速器、牵引减速器、滚珠丝杠、滑动丝杠、诸如蜗轮的减速器、磁编码器、光学编码器、电位器等。
124.此外,从装置50的基座51可以相对于地面在上侧。换句话说,从装置50的顶部/底部可以反转。此外,基座51本身可以耦接到诸如另一操纵器或直接作用台的动作设备。
125.此外,作为phi轴的引导方法,与第一实施例一样,可以通过使用弧形引导件64来调节运动方向,从而使第一单元60可以平滑地执行绕phi轴的弧形运动。除此之外,可以通过使用另一种引导方法来调节运动方向,例如使用用于第一单元60的凸轮从动件。
126.此外,作为theta轴的引导方法,与第一实施例一样,可以通过使用凸轮从动件63来调节运动方向,从而使第二单元70可以平滑地执行绕theta轴的弧形运动。除此之外,可以通过使用另一种引导方法来调节运动方向,例如使用用于第二单元70的弧形引导件。
127.图17a至图17e是示出从各种角度观察的根据第二实施例的从装置50的状态的图像视图。图17a是根据第二实施例的从装置50的第一透视图。图17b是根据第二实施例的从装置50的第二透视图。图17c是根据第二实施例的从装置50的第三透视图。图17d是根据第二实施例的从装置50的第四透视图。图17e是根据第二实施例的从装置50的侧视图。
128.图18a至图18e是并列使用根据第二实施例的两个装置,即从装置50(50r和50l)的情况的图像视图。图18a是并列使用根据第二实施例的两个装置,即从装置50(50r和50l)的情况的后视图。图18b是并列使用根据第二实施例的两个装置,即从装置50(50r和50l)的情况的第一透视图。图18c是并列使用根据第二实施例的两个装置,即从装置50(50r和50l)的情况的第二透视图。图18d是并列使用根据第二实施例的两个装置,即从装置50(50r和50l)
的情况的侧视图。图18e是并列使用根据第二实施例的两个装置,即从装置50(50r和50l)的情况的俯视图。
129.3.结论
130.双边控制系统的目标是“实现操作者在1/n比例的世界中并且执行物理操作的感觉”。这里提到的术语“1/n”是指在1/3或1/10等人难以执行工作的狭小空间中工作。1/10比例的操作意味着,当操作者操作主臂10mm时,从臂移动1mm。为了实现上述目标,“在1/n比例中工作的精度”和“高直接操作感觉”是重要的。当这两个要素转换为臂所需的性能时,前者是“高位置和力分辨率”,后者是“高固有频率”和“足够的可动范围”。在传统从臂的机构结构(关节结构)中,当可动范围扩大以增加自由度时,机构尺寸不可避免地增加,因此难以同时实现高固有频率。此外,为了实现位置和力的精度,例如,要求机构的关节无侧隙,此外还要求高的后驱动性。
131.在具有主臂和从臂的双边控制系统中,为了避免操作者感觉到机器人在高频范围内的干预,需要具有高固有频率的臂,这些臂可以在高频范围内稳定地控制。本公开涉及一种适用于从臂的机构结构(桨机构),其不需要宽的平移可动范围,并且具有以下优点。首先,通过用万向节支撑可移动部分的重心附近,减小了电动机所需的重力补偿扭矩。此外,由于电动机扭矩布置在远离旋转中心的位置,因此即使使用线减速结构,也可以获得高的减速比。因此,可以以低扭矩高精度地控制机构的方向。此外,由于支撑点和作用点彼此远离,机构的固有频率可以容易地提高。此外,常规的臂结构必须在臂的根部放大电动机以执行重力补偿。另一方面,在本公开中,由于重力补偿是由万向节进行的,因此可以减小臂的根部的电动机的尺寸。例如,在本公开中,与传统的臂结构不同,不需要在臂的根部使用具有大直径的精密减速器,而可以使用缆线减速器。根据本公开,可以提供适用于精密操作的极坐标型机械手。
132.尽管已经参照附图详细描述了本公开的优选实施例,但本公开的技术范围不限于这样的示例。显然,在本公开的技术领域具有普通知识的人可以在权利要求书中描述的技术思想的范围内构思各种变化或修改,并且应当理解,这些变化或修改也属于本公开的技术范围。
133.此外,本说明书中描述的效果仅仅是说明性的或示例性的,而不是限制性的。也就是说,除了上述效果之外或代替上述效果,根据本说明书的描述,根据本公开的技术可以表现出对于本领域技术人员来说显而易见的其他效果。
134.本技术也可以采用以下配置。
135.(1)
136.一种医疗臂系统,包括:
137.由操作者操作的操作装置;以及
138.臂装置,其响应于所述操作者相对于所述操作装置的操作而远程操作,其中
139.所述手臂装置具有
140.基座,
141.第一单元,其连接到所述基座,
142.第二单元,其连接到所述第一单元,
143.万向节,其连接到所述基座并支撑所述第二单元,以及
144.端部执行器单元,其连接到所述第二单元并设置有手术工具以接触患者,
145.所述第一单元相对于所述基座在至少一个轴的方向上移动所述第二单元,以及
146.所述第二单元在由所述万向节支撑的状态下与所述第一单元联动,并在所述至少一个轴的所述方向上移动所述端部执行器单元。
147.(2)
148.根据(1)所述的医疗臂系统,其中,所述万向节支持两个轴上旋转。
149.(3)
150.根据(1)或(2)所述的医疗臂系统,其中,所述第二单元与所述第一单元联动并绕所述万向节的第一轴执行弧形运动,以使所述端部执行器单元绕所述第一轴执行弧形运动。
151.(4)
152.根据(1)至(3)中任一项所述的医疗臂系统,其中,所述第二单元绕所述万向节的第二轴执行弧形运动,不在由与所述第一单元联动引起的运动方向上,以使所述端部执行器单元绕所述第二轴执行弧形运动。
153.(5)
154.根据(1)至(4)中任一项所述的医疗臂系统,其中,在所述第二单元由所述万向节支撑的状态下,所述端部执行器单元在所述第二单元的长轴方向上执行滑动运动。
155.(6)
156.根据(1)至(5)中任一项所述的医疗臂系统,其中,在所述第二单元由所述万向节支撑的状态下,所述端部执行器单元绕所述第二单元的长轴执行旋转运动。
157.(7)
158.根据(1)至(6)中任一项所述的医疗臂系统,其中,在所述第二单元由所述万向节支撑的状态下,所述手术工具相对于所述端部执行器单元沿至少一个轴的方向移动。
159.(8)
160.根据(1)至(7)中任一项所述的医疗臂系统,其中,所述万向节的形状是中心中空形状、u形状和l形状中的任何一个。
161.(9)
162.根据(1)至(8)中任一项所述的医疗臂系统,其中,所述臂装置在总共七个轴上执行动作,包括在phi轴、theta轴和r轴上的三轴手术工具位置改变动作,在偏航轴、俯仰轴和滚动轴上的三轴手术工具旋转动作,以及在抓握轴上的手术工具打开/关闭动作。
163.(10)
164.根据(1)至(9)中任一项所述的医疗臂系统,其中,所述臂装置具有设置有缆线减速器的根部。
165.(11)
166.根据(10)所述的医疗臂系统,其中,所述缆线减速器使用至少两根缆线。
167.(12)
168.根据(11)所述的医疗臂系统,其中
169.所述缆线减速器具有耦接到电动机的输入侧绞盘,所述至少两根缆线缠绕在所述输入侧绞盘上,以及
170.绕所述输入侧绞盘缠绕所述至少两根缆线的方向是相反的方向。
171.(13)
172.根据(10)所述的医疗臂系统,其中,在输入侧绞盘绕电动机轴的半径为r,并且所述缆线减速器的输出侧绞盘绕所述万向节的轴的半径为r的情况下,所述缆线减速器的减速比为r/r。
173.(14)
174.根据(1)至(13)中任一项所述的医疗臂系统,其中,所述臂装置绕所述万向节的轴执行弧形运动,并通过使用弧形引导件和凸轮从动件中的至少一个来调节运动方向。
175.(15)
176.一种臂装置,包括:
177.基座;
178.第一单元,其连接到所述基座;
179.第二单元,其连接到所述第一单元;
180.万向节,其连接到所述基座并支撑所述第二单元;以及
181.端部执行器单元,其连接到所述第二单元并设置有端部执行器以作用于对象,其中
182.所述第一单元相对于所述基座在至少一个轴的方向上移动所述第二单元,以及
183.所述第二单元在由所述万向节支撑的状态下与所述第一单元联动,并在所述至少一个轴的所述方向上移动所述端部执行器单元。
184.(16)
185.一种主/从系统的致动方法,包括由操作者操作的主装置和响应于所述操作者相对于所述主装置的操作而远程操作的从装置,其中
186.所述主/从系统基于所述操作者相对于所述主装置的输入来控制所述从装置,以及
187.所述从装置联动并移动第一单元和第二单元,以在至少一个轴的方向上移动手术工具可附接的端部执行器单元,所述第一单元连接到基座,所述第二单元相对于所述基座在所述至少一个轴的所述方向上连接到所述第一单元,所述第二单元由万向节支撑,所述端部执行器单元连接到所述第二单元。
188.参考符号列表
189.1 医疗臂系统
190.10、10r、10l 主装置
191.100、100r、100l 操作装置
192.30 监视器
193.50、50a、50b、50c、50r、50l 从装置(臂装置)
194.51 基座
195.52、52a、52b、52c 万向节
196.60 第一单元
197.61 第一缆线减速器
198.62 第一电动机
199.70、70a、70b、70c 第二单元
200.71 第二缆线减速器
201.72 第二电动机
202.80、80a、80b 端部执行器单元
203.81 臂部
204.82 抓握器。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。