1.本发明涉及一种用于装载和/或卸载真空腔的真空阀,其中,该真空阀具有封闭板,其中,该封闭板在关闭位置被压靠到阀座上并且封闭装载开口,而在打开位置被抬离阀座并且释放装载开口用于装载和/或卸载真空腔,其中,真空阀具有至少一个驱动器,用于在打开位置和关闭位置之间来回移动封闭板。
背景技术:
2.真空阀在现有技术中以多种设计形式已知。它们一方面用于封闭真空腔或处理腔,从而在封闭状态下在真空腔或处理腔中提供封闭空间,在该封闭空间中,可以在可预定的负压条件下,必要时也在专门产生的气氛中进行处理。通用真空阀可以适用于手动地、即用手或利用用手操作的工具来装载和/或卸载真空腔。也就是说,在真空阀的封闭板的打开位置,操作者可以用手将物体放入真空腔中和/或也用手从真空腔中取出物体。为此,操作者必须能够用手或整个手臂或至少利用用手操作的工具穿过打开的真空阀伸入真空腔。但通用真空阀也可以被设置用于例如借助机器人机械式地装载和/或卸载真空腔。
技术实现要素:
3.本发明的目的是,提高用于装载和/或卸载真空腔的通用真空阀的操作安全性。
4.为此,本发明提出,封闭板借助至少一个引导件保持在驱动器的至少一个板保持器上,并且真空阀具有至少一个弹性的预紧体,其中,封闭板可克服弹性预紧体的预紧力(vorspannung)沿着引导件相对于板保持器移动。
5.因此本发明规定,封闭板可移动地固定在驱动器的板保持器上,从而封闭板能够克服弹性预紧体的预紧力沿着引导件相对于板保持器移动。如果操作者的手或手臂或手持工具或其他物体例如装载和/或卸载机器人在封闭板朝向关闭位置移动期间意外地仍处在装载开口中并与封闭板碰撞,则本发明允许封闭板保持不动,尽管驱动器继续向关闭位置的方向上移动。由此提供了一种安全措施,通过该安全措施可以防止仍处在装载开口中的人的身体部位例如他的手、手臂等或仍然位于那里的物体例如装载和/或卸载机器人被挤压、受伤或受损。因而也可以避免真空阀的封闭板或其他组成部分受损。根据本发明的真空阀可以是用于手动地装载和/或卸载真空腔的真空阀,其适合于用手或利用用手操作的工具来执行装载和/或卸载过程。但其也可以是被设置用于机械地例如借助装载和/或卸载机器人执行装载和/或卸载过程的真空阀。
6.根据本发明的真空阀也可以被称为真空封闭装置。在任何情况下,它都是可以应用在所谓的真空技术中的阀门或封闭装置。通常,当达到压力小于或等于0.001mbar(毫巴)或0.1帕斯卡的工作状态时,就说是真空技术。真空阀是针对这些压力范围和/或相应的相对于外界的压力差而设计的阀门。但一般来说,如果其为低于正常压力,即低于1巴的压力而设计,则也可以称为真空阀。
7.特别地,为了能够手动地装载和/或卸载真空腔,待关闭的装载开口优选具有
800cm2至4800cm2,优选1000cm2至1400cm2的尺寸。相应的真空阀的被设置用于封闭这种装载开口的封闭板因此有利地同样至少具有这些尺寸。
8.在优选的设计方式中规定,阀座和/或装载开口被构造为根据本发明的真空阀的组成部分。例如,阀座可以构造在根据本发明的真空阀的阀壳体上。装载开口可以是在根据本发明的真空阀的阀壳体中的相应的优选地被阀座包围的开口。但并非强制地要这样规定。也可以想到其替代方案。例如,可以将阀座和/或装载开口设计为真空腔或处理腔的组成部分。如果封闭板相应地压靠到阀座上,则这种装载开口也可以用根据本发明的真空阀的封闭板封闭。
9.根据本发明的真空阀可以具有用于使得封闭板在打开位置和关闭位置之间来回移动的一个唯一的驱动器,但也可以多个驱动器。根据本发明的真空阀可以是所谓的单真空阀,其中,封闭板在打开位置和关闭位置之间仅仅直线地沿着一个唯一的优选笔直的移动路径来回移动。但根据本发明的真空阀也可以是所谓的l-真空阀,在其中,封闭板在第一移动路径上,然后在至少一个第二移动路径上,在打开位置和关闭位置之间来回移动,其中,这两个移动路径彼此成角度,优选地彼此正交。对于这种所谓的l真空阀,在本发明中还可以规定,封闭板从打开位置开始,首先在第一路径上,沿优选直线的方向,移动到中间位置,在该中间位置,封闭板与装载开口已经叠合,但尚未贴靠在阀座上。在第二移动路径上,封闭板然后从该中间位置到达关闭位置,在该关闭位置,封闭板于是实际上密封地贴靠在阀座上。打开、即从关闭位置移动到打开位置,于是相应地沿着两个移动路径相反地进行。特别地,在根据本发明的这种真空阀中,其中,封闭板在打开位置和关闭位置之间进行l形运动,可以设置两个驱动器,其中,第一驱动器使得封闭板沿着第一移动路径移动,并且第二或者说另外的驱动器然后使得封闭板沿着第二或另外的移动路径移动。然而,原则上应该指出,这种l真空阀使用一个唯一的驱动器也可以应付,如在现有技术中本身已知的那样。
10.在本发明的优选设计方式中,一个或多个驱动器是线性驱动器。封闭板可沿引导件克服弹性预紧体的预紧力相对于板保持器移动,该引导件有利地是线性引导件。因此也有利地规定,封闭板可克服弹性预紧体的预紧力沿着引导件相对于板保持器移位。引导件可以平行于封闭平面布置,其中,封闭板在关闭位置在该封闭平面内贴靠在阀座上。封闭平面因此通常由阀座的表面确定,封闭板在关闭位置贴靠在该表面上。术语“平行于封闭平面布置的引导件”意味着,封闭板在其路径上沿引导件相对于板保持器在平行于封闭平面的方向上移动。在任何情况下,在现有技术中本身已知的各种不同的变体中,引导件可以非常不同地设计。它可以是导轨引导件或滑槽引导件。它完全可以是例如在封闭板或板保持器中的长孔,其中,相应的引导栓在这些长孔中被引导。于是可以将引导栓固定在相应的对应件上,即也固定在封闭板或板保持器上。
11.有利地规定,当封闭板沿着移动路径在打开位置和关闭位置之间来回移动时,可由驱动器使得封闭板移动,并且引导件平行于封闭板的移动路径布置。如开头已经解释的,这可以是在打开位置和关闭位置之间的唯一的移动路径,但也可以是在打开位置和关闭位置之间的多个移动路径之一。引导件平行于封闭板的移动路径布置,这又意味着,封闭板在沿着引导件移动时在平行于封闭板的移动路径的方向上移动,由驱动器使得封闭板在该方向上移动。
12.在任何情况下,通过本发明,封闭板可以沿着引导件克服弹性预紧体的预紧力相对于板保持器并且因此也相对于驱动器被移动。为了也能够确定出这种相对运动,本发明的优选变体规定,真空阀具有探测器,用于确定出封闭板克服弹性预紧体的预紧力沿着引导件相对于板保持器的移动。为此,探测器可以非常不同地设计。在此可以采用各种不同的在现有技术中本身已知的并且可在此使用的探测器。只要封闭板随着驱动器一起移动,就可以利用探测器例如确定出存在正常的工作状态。如果现在人例如用手或手臂或手持工具或物体例如装卸和/或卸载机器人意外地与封闭板发生碰撞,封闭板就会克服弹性预紧体的预紧力沿着引导件相对于板保持器移动,因此也相对于驱动器移动,这可以由探测器确定出来。探测器例如可以具有固定在封闭板上的第一探测器元件。此外,它可以具有至少一个固定在板保持器上的第二探测器元件。在这些设计方式中,当封闭板相对于板保持器移动时,在两个探测器元件之间总是存在相对运动。探测器元件例如可以是磁传感器、电传感器、光传感器等。所有这些在现有技术中以许多设计方式已知。探测器也可以称为开关,每当封闭板和板保持器或两个探测器元件相对于彼此移动时,该开关就切换。
13.根据本发明的真空阀有利地具有调控装置,其中,该调控装置控制至少一个驱动器或多个驱动器,以使得封闭板在打开位置和关闭位置之间来回移动。优选地,调控装置根据探测器的信号来执行这个。在此优选地规定,只要探测器没有确定出在封闭板和板保持器之间沿着引导件克服弹性预紧体的预紧力的任何相对运动,就由调控装置控制驱动器,用于使封闭板来回移动,如同其他操作参数或操作指令规定的那样。然而,如果探测器确定出在封闭板和板保持器之间沿着引导件克服弹性预紧体的预紧力的相对运动,则有利地由调控装置考虑到这一点。例如可以规定,如果探测器的信号表明,封闭板克服弹性预紧体的预紧力沿着引导件相对于板保持器移动,则调控装置将用于使得封闭板来回移动的至少一个驱动器停住。由此实现了一种紧急制动,如果探测器确定出封闭板和板保持器彼此相对运动,这表明,封闭板与物体或人或其手或手臂发生碰撞。当然,如果探测器的信号表明,封闭板克服弹性预紧体的预紧力沿着引导件相对于板保持器移动,则也可以在调控装置中触发其他控制指令。在这种情况下,例如也可以规定,调控装置控制驱动器,使得封闭板的移动方向反向。
14.用于操作根据本发明的真空阀的根据本发明的方法有利地规定,当封闭板在朝向关闭位置的方向上移动时,封闭板克服弹性预紧体的预紧力沿着引导件相对于板保持器移动,如果物体或人与封闭板发生碰撞的话。在根据本发明的方法中,该碰撞于是又可以由相应的探测器确定出来。于是,探测器的相应信号又可以由已经提到的调控装置使用,用来将用于使得封闭板来回移动的驱动器停住或反转其移动方向等。
附图说明
15.下面示范性地借助本发明的设计变体来解释本发明的优选变体的其它特征和细节。
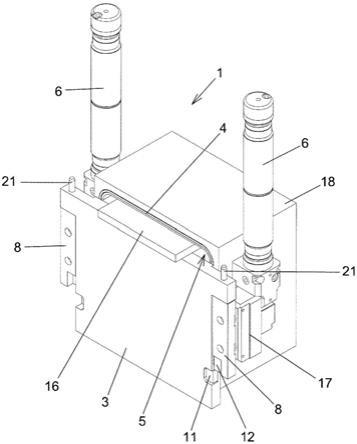
16.图1是处于关闭位置的根据本发明的真空阀的实施例的斜后视图。
17.图2是处于关闭位置的该真空阀的前视图;
18.图3是真空阀在关闭位置的侧视图;
19.图4是真空阀在中间位置的侧视图;
20.图5是沿图4的剖切线aa的剖视图;
21.图6是真空阀在打开位置的侧视图;
22.图7是真空阀在打开位置的主视图;
23.图8是带有被夹紧的物体的真空阀的立体正视图;
24.图9是根据图8的状态的侧视图;以及
25.图10是沿图9中的剖切线bb的剖视图。
具体实施方式
26.附图中所示的根据本发明的真空阀1的实施例是所谓的l阀,其中,封闭板3从图6和图7所示的打开位置,沿着第一移动路径14移动到图4中所示的中间位置,然后沿着第二移动路径24移动到图1至图3中所示的关闭位置。相应地,封闭板3从关闭位置到打开位置的移动相反地发生,首先沿着第二移动路径24移动到中间位置,并且从那里沿着第一移动路径14移动到打开位置。在此处所示的实施例中,移动路径14和24彼此正交地布置。针对于每个移动路径,此处都设置了其自己的驱动器。这里在所示的实施例中,这些驱动器分别成对地设计。两个驱动器6用于使得封闭板沿着第一移动路径14在根据图6和图7的打开位置与根据图4的中间位置之间移动。同样成对地设计的另外的驱动器17用于使得封闭板3在根据图4的中间位置与根据图1至图3的关闭位置之间移动。在此,所有驱动器6和17均设计为线性驱动器。它可以是电动的、气动的、液压的或其他的线性驱动器。该实施例的驱动器6各自具有活塞杆22,这些活塞杆各自承载另外的驱动器17之一。相应的板保持器8分别固定在另外的驱动器17之一上。这些驱动器本身是已知的,并且不需要进一步解释。在该实施例中,板保持器8分别以所描述的方式固定在驱动器6和17上,从而板保持器8始终与驱动器6和17一起移动。在相应的驱动器6或17的板保持器8(其在该实施例中在此相应地存在有两个)上,根据本发明,封闭板3可克服弹性的预紧体9(在此同样存在有两个)的预紧力沿着还将在下面解释的引导件7相对于相应的板保持器8移动。
27.封闭板3在根据图1至图3的关闭位置贴靠在阀座4上,在此处所示的实施例中,该阀座是根据本发明的真空阀1的一部分,其方式为,将其构造在真空阀1的阀壳体18上。阀座4包围装载开口5,该装载开口在关闭位置借助封闭板3封闭。在所示的实施例中,装载开口5同样是根据本发明的真空阀1的组成部分,其方式为,将其构造在阀壳体18中。装载开口5是开口,在真空阀1打开时,可以经由该开口而手动地和/或机械地将物体放入真空腔2中,和/或手动地和/或机械地从真空腔2中取出物体。为此,相应的人用手或手臂或手持工具或例如装载和/或卸载机器人来经由装载开口5伸入到真空腔2中。真空腔2在图3中示意性地示出。在此处所示的实施例中,该真空腔位于阀壳体18的与封闭板3相对的一侧。真空腔2本身是已知的,因此未示出,除了图3之外。
28.开头时已经说明阀座4和装载开口5不一定必须是真空阀1本身的一部分。它们例如也可以直接设计为真空腔2的组成部分。
29.在该实施例中同样存在多个的引导件7,在这里所示的变体中在封闭板3内部被实现,封闭板3可沿着这些引导件克服弹性预紧体9的预紧力相对于板保持器8移动或移位。如沿图4的剖切线aa和图9的剖切线bb在图5和图10的纵剖视图中所示,在该实施例中,引导件7是封闭板3中的长孔19,引导栓20在这些长孔中被引导。在该实施例中,引导栓20各自固定
地紧固在板保持器8之一。在封闭板3和板保持器8之间的相对运动情况下,封闭板3以其长孔19沿导向销20移位,这导致在板保持器8上对封闭板3的相应引导。当然,也可以实现其他的引导件7,以便将封闭板3安置成可相对于板保持器8移动或移位。该引导件例如可以是导轨、其他的导向滑槽等。
30.为了使得封闭板3相对于板保持器8预紧,在该实施例中,在两侧设置了预紧体9,这些预紧体在此设计为螺旋弹簧。这些预紧体9借助销21予以引导。预紧体9的一端分别支撑在封闭板3的凸肩23上。预紧体9的相对端支撑在相应的板保持器8上。在未加载的起始位置或正常位置,预紧体9将封闭板3压至图5所示的相对于相应的板保持器8的位置。为了完整起见,要指出的是,封闭板3和板保持器8之间的预紧当然也可以通过不同设计和不同布置的弹性预紧体来实现。
31.在该实施例中,引导件7平行于封闭板3的移动路径14布置,在该移动路径上,由驱动器6使得封闭板3在根据图6和图7的打开位置与根据图4和图5的中间位置之间来回移动。但在该实施例中,引导件7也平行于图3、图4、图6和图9中所示的封闭平面15布置。封闭平面15由阀座4预先给定。这是封闭板3在关闭位置贴靠在阀座4上的所在平面。
32.在本发明的此处所示的变体中,也设置了探测器10,用于确定出封闭板3克服弹性预紧体9的预紧力沿着引导件7相对于板保持器8的移动。在所示的实施例中,该探测器10具有固定在封闭板3上的第一探测器元件11。它还具有固定在板保持器8上的第二探测器元件12。如果在封闭板3和板保持器8之间存在相对运动,则在第一和第二探测器元件11和12之间也必定存在相对运动。以此方式,探测器10可以确定出封闭板3和板保持器8是否已经沿着引导件7相对于彼此移动,或者板保持器8和封闭板3是否相对于彼此仍处于图1至图7所示的起始位置或正常位置。如开头已经解释的,探测器10可以采用各种不同的物理测量变量工作。它可以是电的、机械的、磁的、光学的或其他的探测器。所有这些本身都是已知的,不需要进一步解释。
33.图2中示意性地示出本身已知的调控装置13,其最初用于控制真空阀1的驱动,即在此在具体的实施例中,控制驱动器6和另外的驱动器17,以便打开和关闭装载开口5。在该实施例中,该调控装置13现在也与探测器10连接,从而调控装置13可以在控制驱动器6和17时考虑探测器10的信号,或换言之,可以根据探测器10的信号来控制用于使得封闭板3来回移动的驱动器6。这可以实现:调控装置13将用于使得封闭板3来回移动的驱动器6停住或反转其移动方向,如果探测器10确定出在封闭板3和板保持器8之间的相对运动、即探测器10的信号表明封闭板3克服弹性预紧体9的预紧力沿着引导件7相对于板保持器8移动的话。
34.后者尤其在封闭板3朝向关闭位置移动时发生,如果以大多无意的方式在装载开口5中仍然存在物体16例如装载和/或卸载机器人或人的手或手臂的话。这个场景在图8至图10中示例性地借助物体16示出,该物体仍然处于装载开口5中,而封闭板3在关闭位置的方向上移动。代替物体16,这也可以是人的手或手臂或身体的另一部分或手引导的工具。如果这导致在物体16或人与封闭板3之间的碰撞,则封闭板3就会由于该碰撞而停住,而在该实施例中,驱动器6进而还有与其固定地连接的板保持器8继续在关闭位置的方向上移动。这导致预紧体9的压缩,并导致封闭板3相对于板保持器8克服弹性预紧体9的预紧力沿着引导件7移动或移位。结果,第一探测器元件11和第二探测器元件12于是也强制地相对于彼此移位,如从作为一方面的图8至10与作为另一方面的图1至7的比较中可以看出。一旦探测器
10以这种方式确定出在封闭板3和板保持器8之间的相对运动,它就向调控装置13发送信号,该调控装置相应地将驱动器6停住或反转其移动方向,从而不会对物体16或被夹在那里的人造成损伤或其他损害。这显著提高了真空阀1的操作安全性,该真空阀用于手动地和/或机械地装载和/或卸载真空腔2。
35.如果随后将物体16或人的相应身体部位从装载开口5中移开,则预紧体9将封闭板3和板保持器8又压回到它们彼此相对的根据图1至图7的起始位置或正常位置,从而真空阀1然后又可以以已知的方式使用来释放以及封闭装载开口5。
36.通常,根据本发明的真空阀1主要设计成使得它可以在关闭过程期间对物体16或人的相应身体部位的夹住做出反应。然而也可以想到的是,根据本发明的真空阀1经过设计,从而这些真空阀仅在打开过程中或者无论在打开过程中还是在关闭过程中都可以实现该安全功能。首先应该指出,根据本发明的真空阀1也可以设计为所谓的单真空阀,其中,封闭板3在打开位置和关闭位置之间仅直线地在一个移动方向上、在此例如在移动路径14的方向上来回移动。为此,只需相应地调整阀座4和封闭板3的形状,这在现有技术中本身是已知的。
37.附图标记列表
[0038]1ꢀꢀ
真空阀
[0039]2ꢀꢀ
真空腔
[0040]3ꢀꢀ
封闭板
[0041]4ꢀꢀ
阀座
[0042]5ꢀꢀ
装载开口
[0043]6ꢀꢀ
驱动器
[0044]7ꢀꢀ
引导件
[0045]8ꢀꢀ
板保持器
[0046]9ꢀꢀ
预紧体
[0047]
10 探测器
[0048]
11 第一探测器元件
[0049]
12 第二探测器元件
[0050]
13 调控装置
[0051]
14 移动路径
[0052]
15 封闭平面
[0053]
16 物体
[0054]
17 另外的驱动器
[0055]
18 阀壳体
[0056]
19 长孔
[0057]
20 引导栓
[0058]
21 销
[0059]
22 活塞杆
[0060]
23 凸肩
[0061]
24 第二移动路径
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。