机器人器械的肘节组件
背景技术:
1.机器人手术系统已用于微创医疗手术。一些机器人手术系统包括支撑机器人臂的操纵台,以及经由肘节组件安装到机器人臂的至少一个末端执行器,例如镊子或抓握工具。在医疗手术期间,将末端执行器和肘节组件插入小切口(经由套管)或患者的自然孔口,以将末端执行器定位在患者体内的工作部位。
2.在机器人手术系统中,线缆从机器人控制台延伸穿过机器人臂,并连接到肘节组件和/或末端执行器。在一些情况下,线缆由电动机致动,该电动机由处理系统控制,该处理系统包括外科医生或临床医生的用户界面,以便能够控制包括机器人臂、肘节组件和/或末端执行器的机器人手术系统。
3.现有的肘节式机器人器械也具有所谓的肘式设计,其中末端执行器的关节运动点和钳口枢转点位于纵向间隔开的位置。因此,考虑到这些末端执行器可设置在其中以接近手术部位的各种位置,与现有肘节式机器人器械相关联的一个挑战是为肘节式机器人器械提供更大范围的运动、接近和触及,从而使外科医生能够执行更多数量的外科手术。
4.因此,存在对提供更大范围的运动、接近和触及的肘节式机器人器械的需求,其为外科医生提供执行更多数量的外科手术的增加的能力。
技术实现要素:
5.因此,本公开详述了肘节式机器人器械的机械实施方式,其为外科医生提供更大范围的运动、接近和触及,从而使外科医生能够执行更多数量的外科手术。
6.根据一个方面,本公开涉及一种用于机器人手术系统的手术器械。该手术器械包括:细长轴,该细长轴限定纵向轴线;末端执行器,该末端执行器具有彼此可移动地联接的第一钳口构件和第二钳口构件;以及肘节组件,该肘节组件将细长轴和末端执行器互连,该肘节组件允许末端执行器的纵向轴线相对于细长轴的纵向轴线旋转或平移。
7.肘节组件包括支撑在细长轴的远侧端部上的近侧接头构件。近侧接头构件限定:纵向延伸的中央管腔;多个纵向延伸的径向管腔,所述多个纵向延伸的径向管腔围绕其中央管腔布置成径向阵列;以及凹部,该凹部形成在其面向远侧的表面中,其中近侧接头构件的凹部与其中央管腔居中对准。
8.肘节组件包括支撑在末端执行器的近侧端部上的远侧接头构件。远侧接头构件限定:纵向延伸的中央管腔;多个纵向延伸的径向管腔,所述多个纵向延伸的径向管腔围绕其中央管腔布置成径向阵列;以及凹部,该凹部形成在其面向近侧的表面中,其中远侧接头构件的凹部与其中央管腔居中对准。
9.肘节组件包括插置在近侧接头构件与远侧接头构件之间的中间接头构件。中间接头构件包括从其朝近侧延伸的近侧球式连接器和从其朝远侧延伸的远侧球式连接器,其中近侧球式连接器安置在形成在近侧接头构件的面向远侧的表面中的凹部内,并且远侧球式连接器安置在形成在近侧接头构件的面向近侧的表面中的凹部内。远侧接头构件限定:纵向延伸的中央管腔;以及多个纵向延伸的径向管腔,所述多个纵向延伸的径向管腔围绕其
中央管腔布置成径向阵列。
10.肘节组件可包括:近侧轴承,该近侧轴承设置在近侧接头构件的凹部内,并且插置在近侧接头构件和中间接头构件的近侧球式连接器之间;以及远侧轴承,该远侧轴承设置在远侧接头构件的凹部内,并且插置在远侧接头构件和中间接头构件的远侧球式连接器之间。
11.近侧轴承可限定一对沿直径相对的、径向向外突出的凸台,该对凸台限定穿过其中的枢转轴线;并且远侧轴承可限定一对沿直径相对的、径向向外突出的凸台,该对凸台限定穿过其中的枢转轴线。
12.近侧轴承的该对凸台的枢转轴线和远侧轴承的该对凸台的枢转轴线可以位于共同平面中。
13.近侧接头构件可限定在其凹部的边缘中形成的一对沿直径相对的、径向向外突出的枢转沟槽,并且该对枢转沟槽可被构造和定尺寸为可枢转地接纳近侧轴承的该对凸台。远侧接头构件可限定在其凹部的边缘中形成的一对沿直径相对的、径向向外突出的枢转沟槽,并且该对枢转沟槽可被构造和定尺寸为可枢转且可滑动地接纳远侧轴承的该对凸台。
14.中间接头构件的近侧球式连接器可限定一对沿直径相对的、径向向外突出的凸台,该对凸台限定穿过其中的枢转轴线。中间接头构件的远侧球式连接器可限定一对沿直径相对的、径向向外突出的凸台,该对凸台限定穿过其中的枢转轴线。
15.近侧球式连接器的该对凸台的枢转轴线和远侧球式连接器的该对凸台的枢转轴线可以位于共同平面中。
16.近侧轴承的该对凸台的枢转轴线可以与近侧球式连接器的该对凸台的枢转轴线正交。
17.远侧轴承的该对凸台的枢转轴线可以与远侧球式连接器的该对凸台的枢转轴线正交。
18.近侧轴承可限定在其凹部的边缘中形成的一对沿直径相对的、径向向内突出的枢转沟槽,并且该沟槽可被构造和定尺寸为可枢转且可滑动地接纳中间接头构件的近侧球式连接器的该对凸台。远侧轴承可限定在其凹部的边缘中形成的一对沿直径相对的、径向向内突出的枢转沟槽,并且该沟槽可被构造和定尺寸为可枢转且可滑动地接纳中间接头构件的远侧球式连接器的该对凸台。
19.远侧接头构件可包括围绕其中央管腔布置成径向阵列的四个纵向延伸的径向管腔。中间接头构件可包括围绕其中央管腔布置成径向阵列的八个纵向延伸的径向管腔,其中中间接头构件的八个径向管腔中的四个径向管腔可与远侧接头构件的四个径向管腔配准。
20.近侧接头构件可包括围绕其中央管腔布置成径向阵列的八个纵向延伸的径向管腔,其中近侧接头构件的八个径向管腔与中间接头构件的八个径向管腔配准。
21.手术器械还可包括延伸穿过肘节组件的多根关节运动线缆。在一个实施例中,所述多根线缆中的四根关节运动线缆可包括固定到远侧接头构件的远侧端部和可滑动地延伸穿过中间接头构件的四个纵向延伸的径向管腔的近侧端部,该中间接头构件的四个纵向延伸的径向管腔与远侧接头构件的四个纵向延伸的径向管腔配准。所述多根线缆中的四根关节运动线缆可包括固定到中间构件的远侧端部和可滑动地延伸穿过近侧接头构件的四
个纵向延伸的径向管腔的近侧端部,该近侧接头构件的四个纵向延伸的径向管腔与中间接头构件的四个未占据的纵向延伸的径向管腔配准。
22.近侧轴承和远侧轴承可由润滑材料制成。
23.根据本公开的另一方面,提供了一种用于手术器械的肘节组件。肘节组件包括:近侧接头构件,该近侧接头构件被构造用于支撑在细长轴的远侧端部上;远侧接头构件,该远侧接头构件被构造用于支撑在手术末端执行器的近侧端部上;以及中间接头构件,该中间接头构件插置在近侧接头构件与远侧接头构件之间。近侧接头构件限定:纵向延伸的中央管腔;多个纵向延伸的径向管腔,所述多个纵向延伸的径向管腔围绕其中央管腔布置成径向阵列;以及凹部,该凹部形成在其面向远侧的表面中,其中近侧接头构件的凹部与其中央管腔居中对准。
24.远侧接头构件限定:纵向延伸的中央管腔;多个纵向延伸的径向管腔,所述多个纵向延伸的径向管腔围绕其中央管腔布置成径向阵列;以及凹部,该凹部形成在其面向近侧的表面中,其中远侧接头构件的凹部与其中央管腔居中对准。
25.中间接头构件包括从其朝近侧延伸的近侧球式连接器和从其朝远侧延伸的远侧球式连接器,其中近侧球式连接器安置在形成在近侧接头构件的面向远侧的表面中的凹部内,并且远侧球式连接器安置在形成在近侧接头构件的面向近侧的表面中的凹部内。
26.远侧接头构件限定:纵向延伸的中央管腔;以及多个纵向延伸的径向管腔,所述多个纵向延伸的径向管腔围绕其中央管腔布置成径向阵列。
27.肘节组件还可包括:近侧轴承,该近侧轴承设置在近侧接头构件的凹部内,并且插置在近侧接头构件和中间接头构件的近侧球式连接器之间;以及远侧轴承,该远侧轴承设置在远侧接头构件的凹部内,并且插置在远侧接头构件和中间接头构件的远侧球式连接器之间。
28.近侧轴承可限定一对沿直径相对的、径向向外突出的凸台,该对凸台限定穿过其中的枢转轴线;并且远侧轴承可限定一对沿直径相对的、径向向外突出的凸台,该对凸台限定穿过其中的枢转轴线。
29.近侧轴承的该对凸台的枢转轴线和远侧轴承的该对凸台的枢转轴线可以位于共同平面中。
30.近侧接头构件可限定在其凹部的边缘中形成的一对沿直径相对的、径向向外突出的枢转沟槽,并且该对枢转沟槽可被构造和定尺寸为可枢转地接纳近侧轴承的该对凸台。远侧接头构件可限定在其凹部的边缘中形成的一对沿直径相对的、径向向外突出的枢转沟槽,并且该对枢转沟槽可被构造和定尺寸为可枢转且可滑动地接纳远侧轴承的该对凸台。
31.中间接头构件的近侧球式连接器可限定一对沿直径相对的、径向向外突出的凸台,该对凸台限定穿过其中的枢转轴线。中间接头构件的远侧球式连接器可限定一对沿直径相对的、径向向外突出的凸台,该对凸台限定穿过其中的枢转轴线。
32.近侧球式连接器的该对凸台的枢转轴线和远侧球式连接器的该对凸台的枢转轴线可以位于共同平面中。
33.近侧轴承的该对凸台的枢转轴线可以与近侧球式连接器的该对凸台的枢转轴线正交。
34.远侧轴承的该对凸台的枢转轴线可以与远侧球式连接器的该对凸台的枢转轴线
正交。
35.近侧轴承可限定在其凹部的边缘中形成的一对沿直径相对的、径向向内突出的枢转沟槽,并且该沟槽被构造和定尺寸为可枢转且可滑动地接纳中间接头构件的近侧球式连接器的该对凸台。远侧轴承可限定在其凹部的边缘中形成的一对沿直径相对的、径向向内突出的枢转沟槽,并且该沟槽被构造和定尺寸为可枢转且可滑动地接纳中间接头构件的远侧球式连接器的该对凸台。
36.远侧接头构件可包括围绕其中央管腔布置成径向阵列的四个纵向延伸的径向管腔。中间接头构件可包括围绕其中央管腔布置成径向阵列的八个纵向延伸的径向管腔,其中中间接头构件的八个径向管腔中的四个径向管腔与远侧接头构件的四个径向管腔配准。
37.近侧接头构件可包括围绕其中央管腔布置成径向阵列的八个纵向延伸的径向管腔,其中近侧接头构件的八个径向管腔与中间接头构件的八个径向管腔配准。
38.肘节组件还可包括延伸穿过其中的多根关节运动线缆。在一个实施例中,所述多根线缆中的四根关节运动线缆包括固定到远侧接头构件的远侧端部和可滑动地延伸穿过中间接头构件的四个纵向延伸的径向管腔的近侧端部,该中间接头构件的四个纵向延伸的径向管腔与远侧接头构件的四个纵向延伸的径向管腔配准。所述多根线缆中的四根关节运动线缆可包括固定到中间构件的远侧端部和可滑动地延伸穿过近侧接头构件的四个纵向延伸的径向管腔的近侧端部,该近侧接头构件的四个纵向延伸的径向管腔与中间接头构件的四个未占据的纵向延伸的径向管腔配准。
39.近侧轴承和远侧轴承可由润滑材料制成。
40.根据以下描述、附图和权利要求,其它方面、特征和优点将显而易见。
附图说明
41.并入本说明书中且构成本说明书的部分的附图示出了本公开的实施例,并连同上文给出的本公开的总体描述与下文给出的详细描述一起用以解释本公开的原理,其中:
42.图1是根据本公开的机器人手术系统的透视图;
43.图2是图1的细节的指示区域的放大示意图,示出了处于关节运动状况的机器人手术系统的手术器械的远侧端部;
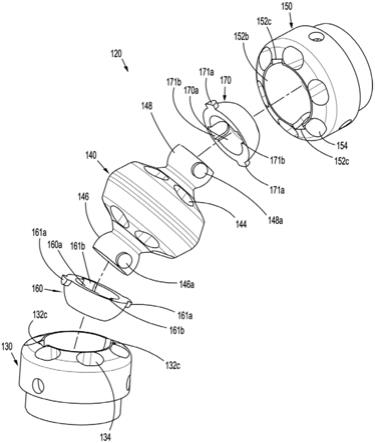
44.图3是图1和图2所示的手术器械的肘节组件的放大后透视图;
45.图4是图3中所示的肘节组件的零件分离的透视图;
46.图5是图3中所示的肘节组件的纵向横截面视图;
47.图5是图2至图4的肘节组件的零件分离的透视图;
48.图6是图3所示肘节组件的放大前透视图;
49.图7是沿图6的7-7截取的图6所示肘节组件的横截面视图;
50.图8是图7所示肘节组件的透视图,示出了远侧接头构件相对于中间接头构件的关节运动;
51.图9是沿图6的9-9截取的图6所示肘节组件的横截面视图;
52.图10是图9所示肘节组件的透视图,示出了远侧接头构件相对于中间接头构件的关节运动;
53.图11是根据本公开的另一个实施例的用于手术器械的肘节组件的放大透视图;
54.图12是图11中所示的肘节组件的零件分离的透视图;
55.图13是图11至图12的肘节组件的纵向横截面视图,同时肘节组件处于非关节运动状况;
56.图14是图12所示的肘节组件的近侧接头构件的纵向横截面视图;并且
57.图15是沿图11的15-15截取的图11所示肘节组件的透视图。
具体实施方式
58.参考附图详细描述了本公开的实施例,其中相同的附图标记在若干视图中的每一个中表示相同或对应的元件。众所周知,术语“临床医生”是指医生、外科医生、护士或任何其他护理提供者并且可以包括辅助人员。另外,术语“近侧”是指结构的更靠近临床医生的部分,并且术语“远侧”是指结构的更远离临床医生的部分。此外,例如前、后、上部、下部、顶部、底部等的方向术语仅为描述的方便起见而使用,且并不希望限制随附于此的公开内容。
59.在以下描述中,没有详细描述公知的功能或构造,以避免在不必要的细节上使本公开模糊。
60.简要参考图1,示出了机器人手术系统10,其包括机器人臂20,该机器人臂支撑具有末端执行器100的肘节式手术器械30。机器人手术系统10采用各种机器人元件来辅助临床医生并且允许例如手术器械30之类的手术器械的远程操作(或部分远程操作)。各种机械臂、齿轮、凸轮、滑轮、电动和机械马达等可以用于此目的,并且可以设计有机器人手术系统10以在手术或治疗过程期间辅助临床医生。
61.机器人手术系统10可与手术室旁边的或位于远程位置的一个或多个控制台(未示出)一起使用。在此情况下,一个临床医生团队可使患者做好手术准备,并用本文中所公开的器械/末端执行器中的一个或多个配置机器人手术系统,而另一临床医生(或一组临床医生)经由机器人手术系统10远程地控制所述器械/末端执行器。可以理解,高度熟练的临床医生可在多个位置上执行多个操作而不离开他/她的远程控制台,这在经济上是有利的,并且对于患者或一系列患者而言是有益的。关于示范性医疗工作站和/或其部件的详细描述,可以参考美国专利申请公开号2012/0116416和pct申请公开号wo2016/025132,其全部内容通过引用并入本文。
62.现在转到图2至图10,手术器械30包括细长轴32,该细长轴将末端执行器100支撑在其远侧端部上。轴32限定纵向轴线“xx”,末端执行器100可以围绕该纵向轴线“xx”旋转。末端执行器100包括钳口组件110,该钳口组件具有顶部或第一钳口构件112,以及联接到第一钳口构件112的底部或第二钳口构件114。钳口组件110通过肘节组件120连接到轴32的远侧端部。如下所述,钳口组件110被定位在肘节组件120的远侧端部,以便在肘节组件120致动时相对于纵向轴线“xx”进行关节运动。末端执行器100的钳口组件110联接到手术器械30的一根或多根中心线缆、推杆/拉杆等、“c”形件(参见图5)等,所述一根或多根中心线缆、推杆/拉杆、“c”形件等可通过机器人致动以向钳口组件110施加致动(例如,打开/闭合移动)。
63.肘节组件120包括以头尾相接的方式彼此可枢转地互连的若干个接头构件。具体地,肘节组件120包括近侧接头构件130、可枢转地连接到近侧接头构件130的中间或中部接头构件140和可枢转地连接到中间接头构件140的远侧接头构件150。
64.近侧接头构件130不可旋转地支撑在细长轴32的远侧端部上或远侧端部处。近侧
接头构件130具有基本上圆柱形的轮廓并且限定锥形或凸形的面向远侧的表面130a。近侧接头构件130限定完全延伸穿过其中并与其中心纵向轴线同轴的中央管腔132a。近侧接头构件130的中央管腔132a限定在其远侧端部处形成的面向远侧的凹部132b。近侧接头构件130还包括沿凹部132b的边缘形成的一对沿直径相对的、径向向内延伸的枢转沟槽132c。枢转沟槽132c限定第一枢转轴线“a1”。
65.近侧接头构件130还限定围绕中央管腔132a设置的多个纵向延伸的径向管腔134。径向管腔134完全延伸穿过近侧接头构件130,并且可以平行于其中央管腔132a的中心纵向轴线或相对于其中心纵向轴线成一定角度延伸。具体地,近侧接头构件130限定八(8)个径向管腔134的环形阵列。虽然示出和描述了八(8)个径向管腔134,但是可以设想近侧接头构件130可以包括少于或多于八(8)个管腔134。
66.肘节组件120包括可滑动地安置或嵌套在近侧接头构件130的凹部132b中的近侧间隔件或轴承160。轴承160的形状基本上是半球形的并且限定面向远侧的凹部160a和延伸穿过其中的中央管腔160b。轴承160包括一对沿直径相对的、径向向外突出的凸台161a,该对凸台被构造和定尺寸为可枢转地安置在近侧接头构件130的枢转沟槽132c中。轴承160的凸台161a的中心轴线与近侧接头构件130的枢转沟槽132c的第一枢转轴线“a1”共线。轴承160还包括沿凹部160a的边缘形成的一对沿直径相对的、径向向内延伸的枢转沟槽161b。枢转沟槽161b限定与第一枢转轴线“a1”正交的第二枢转轴线“a2”。
67.中间接头构件140不可旋转地连接到近侧接头构件130。中间接头构件140具有基本上圆柱形的轮廓并且限定锥形或凸形的面向远侧的表面140a和锥形或凸形的面向近侧的表面140b。中间接头构件140限定中央管腔142a,该中央管腔完全延伸穿过其中并且与其中心纵向轴线以及与近侧接头构件130的中央管腔132a同轴。
68.中间接头构件140还限定围绕中央管腔142a设置的多个纵向延伸的径向管腔144。径向管腔144完全延伸穿过中间接头构件140,并且可以平行于其中央管腔142a的中心纵向轴线或相对于其中心纵向轴线成一定角度延伸。具体地,中间接头构件140限定八(8)个径向管腔144的环形阵列。虽然示出和描述了八(8)个径向管腔144,但是可以设想中间接头构件140可以包括少于或多于八(8)个管腔144。
69.中间接头构件140包括从其面向近侧的表面140b突出的近侧球式连接器146。近侧球式连接器146被构造和定尺寸为可旋转地和可滑动地嵌套或安置在轴承160的面向远侧的凹部160a中。可以设想,近侧球式连接器146和轴承160的凹部160a可以被构造和定尺寸以便在它们之间形成卡扣配合的球窝连接。近侧球式连接器146包括一对沿直径相对的、径向向外突出的凸台146a,该对凸台被构造和定尺寸为可枢转地安置在轴承160的枢转沟槽161b中。
70.中间接头构件140包括从其面向远侧的表面140a突出的远侧球式连接器148。如下所述,远侧球式连接器148被构造和定尺寸为可旋转且可滑动地嵌套或安置在轴承170的面向近侧的凹部170a中。可以设想,远侧球式连接器148和轴承170的凹部170a可以被构造和定尺寸以便在它们之间形成卡扣配合的球窝连接。如下所述,远侧球式连接器148包括一对沿直径相对的、径向向外突出的凸台148a,该对凸台被构造和定尺寸为可枢转地安置在轴承170的枢转沟槽171b中。
71.在一个实施例中,近侧球式连接器146的凸台146a的中心轴线和远侧球式连接器
148的凸台148a的中心轴线彼此平行。虽然凸台146a和凸台148a被示出和描述为平行的,但是凸台146a、148a的平行性对于功能不是必需的,因为两个接头都独立地满足圆锥/球形运动。然而,凸台146a、148a的平行对准是非常实用的,从而给出了中间接头构件的对称形状,并且有助于产生更好的对准以运行驱动线缆以及其他实用益处。
72.可以设想,中间接头构件140的中央管腔142a完全延伸穿过近侧球式连接器146和远侧球式连接器148。还可以设想,中央管腔142a的近侧部分142b以圆锥形或截头圆锥形轮廓径向向外张开,并且中央管腔142a的远侧端部部分142c也以圆锥形或截头圆锥形轮廓径向向外张开。
73.肘节组件120包括可滑动地安置或嵌套在远侧接头构件150的凹部152b中的远侧间隔件或轴承170,如下所述。轴承170的形状基本上是半球形的并且限定面向近侧的凹部170a和延伸穿过其中的中央管腔170b。如上所述,轴承170的面向近侧的凹部170a和远侧球式连接器148可以被构造和定尺寸以便在它们之间形成卡扣配合的球窝连接。如下所述,轴承170包括一对沿直径相对的、径向向外突出的凸台171a,该对凸台被构造和定尺寸为可枢转地安置在远侧接头构件150的枢转沟槽152c中。如下所述,轴承170的凸台171a的中心轴线与远侧接头构件150的枢转沟槽152c的第一枢转轴线“b1”共线。轴承170还包括沿凹部170a的边缘形成的一对沿直径相对的、径向向内延伸的枢转沟槽171b,并且该对枢转沟槽被构造成可枢转地接纳中间接头构件140的远侧球式连接器148的凸台148a。枢转沟槽171b限定与第一枢转轴线“b1”正交的第二枢转轴线“b2”,这有助于保持球形接头连接的圆锥形/球形(肘节式)运动。
74.远侧接头构件150不可旋转地支撑钳口组件110。远侧接头构件150具有基本上圆柱形的轮廓并且限定锥形或凸形的面向近侧的表面150a。远侧接头构件150限定完全延伸穿过其中并与其中心纵向轴线同轴的中央管腔152a。远侧接头构件150的中央管腔152a限定在其近侧端部处形成的面向近侧的凹部152b。远侧接头构件150还包括沿凹部132b的边缘形成的一对沿直径相对的、径向向内延伸的枢转沟槽152c。枢转沟槽132c限定与轴承170的凸台171a的中心轴线的枢转轴线“b1”同轴的枢转轴线。
75.远侧接头构件150还限定围绕中央管腔152a设置的多个纵向延伸的径向管腔154。径向管腔154完全延伸穿过远侧接头构件150,并且可以平行于其中央管腔152a的中心纵向轴线或相对于其中心纵向轴线成一定角度延伸。具体地,远侧接头构件150限定四(4)个径向管腔154的环形阵列。虽然示出和描述了四(4)个径向管腔154,但是可以设想远侧接头构件150可以包括少于或多于四(4)个管腔154。
76.可以设想,近侧接头构件130的枢转沟槽132c的第一枢转轴线“a1”和轴承170的凸台171a的中心轴线的第一枢转轴线“b1”在共同平面中。还可以设想,近侧轴承160的枢转沟槽161b的第二枢转轴线“a2”和轴承170的枢转沟槽171b的第二枢转轴线“b2”在共同平面中。
77.还可以设想,远侧接头构件150的第一对沿直径相对的径向管腔154与轴承170的凸台171a的中心轴线的第一枢转轴线“b1”对准,并且远侧接头构件150的第二对沿直径相对的径向管腔154与轴承170的枢转沟槽171b的第二枢转轴线“b2”对准。还可以设想,远侧接头构件150的四(4)个径向管腔154与中间接头构件140的对应的四(4)个径向管腔144配准。中间接头构件140的总共八(8)个径向管腔144中剩余的四(4)个径向管腔144插置在前
四(4)个径向管腔244之间。中间接头构件140的总共八(8)个径向管腔144与近侧接头构件130的八(8)个径向管腔134配准。
78.手术器械30包括延伸穿过细长轴32的八(8)根关节运动线缆“ac”。关节运动线缆“ac”各自具有与机器人臂20和/或机器人手术系统的马达可操作地接合的近侧端部(未示出)。
79.八(8)根关节运动线缆“ac”中的四(4)根关节运动线缆“ac1”包括设置在远侧接头构件150的径向管腔154内或延伸穿过径向管腔的远侧端部,其中关节运动线缆“ac1”的这些远侧端部被锚定或以其他方式固定到远侧接头构件150。关节运动线缆“ac1”从远侧接头构件150朝近侧延伸,穿过中间接头构件140的对应径向管腔144,并且朝近侧穿过近侧接头构件130的对应径向管腔134。
80.八(8)根关节运动线缆“ac”中剩余的四(4)根关节运动线缆“ac2”包括设置在中间接头构件140的未占据径向管腔144内或延伸穿过未占据径向管腔的远侧端部,其中关节运动线缆“ac2”的这些远侧端部被锚定或以其他方式固定到中间接头构件140。关节运动线缆“ac2”从中间接头构件140朝近侧延伸,穿过近侧接头构件130的对应径向管腔134。
81.可以设想,接头构件130、140、150和轴承160、170由不锈钢、钛、聚合物、树脂、复合材料、尼龙、硅树脂等制成。在一个实施例中,接头构件130、140、150由不锈钢制成,并且轴承160、170由尼龙(或其他润滑材料)制成。
82.根据本公开,可以设想,关节运动线缆“ac”中的至少一根关节运动线缆的近侧回缩将导致手术器械30的肘节组件120的关节运动。可以设想,肘节组件120可以根据关节运动线缆“ac”的协调的近侧回缩在多个方向上进行关节运动。还可以设想,随着一根或多根关节运动线缆“ac”朝近侧回缩,必须允许至少一根或多根关节运动线缆“ac”朝远侧平移。
83.肘节组件120限定近侧接头构件130和中间接头构件140之间的第一自由度(沿着由沿近侧接头构件130的凹部132b形成的枢转沟槽132c限定的第一枢转轴线“a1”)、近侧接头构件130和中间接头构件140之间的第二自由度(沿着由沿近侧轴承160的凹部160a形成的枢转沟槽160a限定的第二枢转轴线“a2”)、中间接头构件140和远侧接头构件150之间的第三自由度(沿着由沿远侧接头构件150的凹部152b形成的枢转沟槽152c限定的第一枢转轴线“b1”)、以及中间接头构件140和远侧接头构件150之间的第四自由度(沿着由沿远侧轴承170的凹部170a形成的枢转沟槽171b限定的第二枢转轴线“b2”)。
84.现在转到图11至图15,示出了根据本公开的另一实施例的用于结合到手术器械(例如,手术器械30)中的肘节组件220。肘节组件220包括以头尾相接的方式彼此可枢转地互连的若干个接头构件。具体地,肘节组件220包括近侧接头构件230、可枢转地连接到近侧接头构件230的中间或中部接头构件240和可枢转地连接到中间接头构件240的远侧接头构件250。
85.近侧接头构件230不可旋转地支撑在手术器械的细长轴的远侧端部上或远侧端部处。近侧接头构件230具有基本上圆柱形的轮廓并且限定平坦的面向远侧的表面230a。近侧接头构件230限定完全延伸穿过其中并与其中心纵向轴线同轴的中央管腔232a。近侧接头构件230的中央管腔232a限定在其远侧端部处形成的面向远侧的凹部232b。近侧接头构件230还包括沿凹部232b的边缘形成的一对沿直径相对的、径向向内延伸的枢转沟槽232c。枢转沟槽232c限定第一枢转轴线。
86.近侧接头构件230还限定围绕中央管腔232a设置的多个纵向延伸的径向管腔234。径向管腔234完全延伸穿过近侧接头构件230,并且可以平行于其中央管腔232a的中心纵向轴线和/或相对于其中心纵向轴线成一定角度延伸。具体地,近侧接头构件230限定八(8)个径向管腔234的环形阵列。虽然示出和描述了八(8)个径向管腔234,但是可以设想近侧接头构件230可以包括少于或多于八(8)个管腔234。
87.中间接头构件240不可旋转地连接到近侧接头构件230。中间接头构件240具有基本上圆柱形的轮廓并且限定平坦的面向远侧的表面240a和锥形或圆锥形的面向近侧的表面240b。中间接头构件240限定中央管腔242a,该中央管腔完全延伸穿过其中并且与其中心纵向轴线以及与近侧接头构件230的中央管腔232a同轴。
88.中间接头构件240还限定围绕中央管腔242a设置的多个纵向延伸的径向管腔244。径向管腔244完全延伸穿过中间接头构件240,并且可以平行于其中央管腔242a的中心纵向轴线和/或相对于其中心纵向轴线成一定角度延伸。具体地,中间接头构件240限定八(8)个径向管腔244的环形阵列。虽然示出和描述了八(8)个径向管腔244,但是可以设想中间接头构件240可以包括少于或多于八(8)个管腔244。
89.中间接头构件240包括从其面向近侧的表面240b突出的近侧球式连接器246。近侧球式连接器246被构造和定尺寸为可旋转地和可滑动地嵌套或安置在近侧接头构件230的面向远侧的凹部232b中。可以设想,近侧球式连接器246和近侧接头构件230的凹部232b可以被构造和定尺寸以便在它们之间形成卡扣配合的球窝连接。近侧球式连接器246包括一对沿直径相对的、径向向外突出的凸台246a,该对凸台被构造和定尺寸为可枢转地安置在近侧接头构件230的枢转沟槽232c中。
90.中间接头构件240限定在其远侧端部处形成的面向远侧的凹部242b。中间接头构件240还包括沿凹部242b的边缘形成的一对沿直径相对的、径向向内延伸的枢转沟槽242c。枢转沟槽242c限定第二枢转轴线。中间接头构件240的枢转沟槽242c的第二枢转轴线正交于近侧接头构件230的枢转沟槽232c的第一枢转轴线定向。
91.可以设想,中间接头构件240的中央管腔242a完全延伸穿过近侧球式连接器246和面向远侧的凹部242b。还可以设想,中央管腔242a的近侧端部部分242b以圆锥形或截头圆锥形轮廓径向向外张开。
92.远侧接头构件250不可旋转地支撑钳口组件110。远侧接头构件250具有基本上圆柱形的轮廓并且限定锥形或圆锥形的面向近侧的表面250a。远侧接头构件250限定完全延伸穿过其中并与其中心纵向轴线同轴的中央管腔252a。
93.远侧接头构件250还限定围绕中央管腔252a设置的多个纵向延伸的径向管腔254。径向管腔254完全延伸穿过远侧接头构件250,并且可以平行于其中央管腔252a的中心纵向轴线和/或相对于其中心纵向轴线成一定角度延伸。具体地,远侧接头构件250限定四(4)个径向管腔154的环形阵列。虽然示出和描述了四(4)个径向管腔254,但是可以设想远侧接头构件250可以包括少于或多于四(4)个管腔254。
94.远侧接头构件250包括从其面向近侧的表面250b突出的近侧球式连接器256。近侧球式连接器256被构造和定尺寸为可旋转地和可滑动地嵌套或安置在中间接头构件240的面向远侧的凹部242b中。可以设想,远侧接头构件250的近侧球式连接器256和中间接头构件240的凹部242b可以被构造和定尺寸以便在它们之间形成卡扣配合的球窝连接。近侧球
式连接器256包括一对沿直径相对的、径向向外突出的凸台256a,该对凸台被构造和定尺寸为可枢转地安置在中间接头构件240的枢转沟槽242c中。
95.可以设想,远侧接头构件250的第一对沿直径相对的径向管腔254与中间接头构件240的枢转沟槽242c的第二枢转轴线对准,并且远侧接头构件250的第二对沿直径相对的径向管腔254与近侧接头构件230的枢转沟槽232c的第一枢转轴线对准。
96.还可以设想,远侧接头构件250的四(4)个径向管腔254与中间接头构件240的对应的四(4)个径向管腔244配准。中间接头构件240的总共八(8)个径向管腔244中剩余的四(4)个径向管腔244插置在前四(4)个径向管腔244之间。中间接头构件240的总共八(8)个径向管腔244与近侧接头构件230的八(8)个径向管腔234配准。
97.肘节组件220可包括如上所述的肘节组件120的近侧间隔件轴承160或远侧间隔件轴承170形式的近侧间隔件或轴承和/或远侧间隔件或轴承(未示出)。
98.类似于包括肘节组件120的手术器械30,包括肘节组件230的手术器械包括八(8)根关节运动线缆“ac”,所述关节运动线缆“ac”延伸穿过细长轴32并且与相应的中间接头构件240和远侧接头构件250可操作地相关联。
99.肘节组件220限定近侧接头构件230和中间接头构件240之间的第一自由度(沿着由沿近侧接头构件230的凹部232b形成的枢转沟槽232c限定的第一枢转轴线),以及中间接头构件240和远侧接头构件250之间的第二自由度(沿着由沿中间接头构件240的凹部242b形成的枢转沟槽242c限定的第二枢转轴线)。
100.近侧接头构件230还包括沿凹部232b的边缘形成的一对沿直径相对的、径向向内延伸的枢转沟槽232c。枢转沟槽232c
101.所属领域的技术人员将理解,本文中具体描述并在附图中示出的结构和方法是非限制性的示例性实施例,并且所述描述、公开和图式应仅被解释为具体实施例的示例。因此,应理解,本公开不限于所描述的精确实施例,且所属领域的技术人员可在不脱离本公开的范围或精神的情况下实现各种其他改变和修改。另外,预见到结合一个示例性实施例说明或描述的元件和特征可与不脱离本公开的范围的另一示例性实施例的元件和特征组合,并且此类修改和变化还意图包含在本公开的范围内。实际上,目前公开的元件和特征中的任何者的任何组合在本公开的范围内。因此,本公开的主题并不受到已特定展示和描述的内容的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。