1.本发明涉及通信终端技术领域,具体为空间光通信小型化终端静态像差校正方法。
背景技术:
2.在接收与发射同光路的空间光通信终端中,使用自适应光学对发射与接收信号、信标光的波面像差进行校正。此时,通信终端有一条共光路与五条非共光路,其中,波前探测光路仅起到探测波前像差的作用,并且可以对自身初始像差进行标定,所以通信终端对其像差要求是较低的,而对其他非共光路像差要求相对来说较高。然而,传统自适应光学系统在波前探测光路中通过夏克-哈特曼波前探测器(sh-wfs)对波前像差进行探测,从而控制变形镜(dm)产生特定的面型补偿这一像差,这样只能保证波前探测光路接收信号像质良好,无法保证其他非共光路的像差也得到校正。同时,整个系统的光路还有可能存在较大的静态像差,虽然可以在实验室将这个像差测量出来,但在通信终端工作期间,会有温度变化、灰尘黏附等特殊情况,静态像差就会发生改变。在共光路以及信标光接收光路初始像差较差的情况下,ccd接收信标光的光斑质量较差,不利于追踪功能的实现。
技术实现要素:
3.本发明的目的是:针对现有技术中共光路以及信标光接收光路初始像差较差的情况下,会导致ccd接收信标光的光斑质量较差,不利于追踪功能的实现的问题,提出空间光通信小型化终端中共光路与信标光接收光路静态像差校正方法。
4.本发明为了解决上述技术问题采取的技术方案是:
5.空间光通信小型化终端静态像差校正方法,所述方法包括:
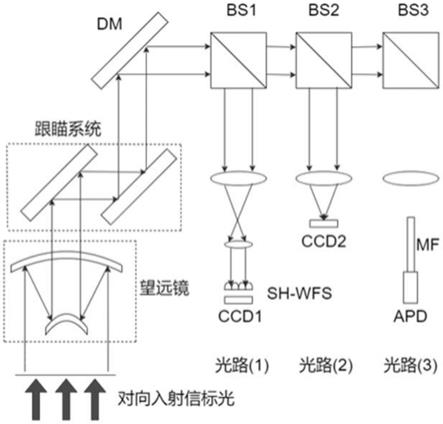
6.步骤一:构建全光路模块,所述全光路系统包括三条光路:
7.光路一:入射光依次经过望远镜、跟瞄系统和压电变形镜,经过压电变形镜后的信标光通过第一分束器后进行缩束,缩束后进入夏克-哈特曼波前探测器;
8.光路二:入射光依次经过望远镜、跟瞄系统和压电变形镜,经过压电变形镜后的信标光通过第一分束器后进入第二分束器,第二分束器输出的信标光经过聚焦透镜输出后进入ccd2;
9.光路三:入射光依次经过望远镜、跟瞄系统和压电变形镜,经过压电变形镜后的信标光通过第一分束器后进入第二分束器,进入第二分束器的信标光依次通过第三分束器、聚焦透镜、多模光纤后进入雪崩光电二极管;
10.步骤二:根据构建好的全光路模块,解算出ccd2上的光斑压电变形镜补偿面型的控制电压;
11.步骤三:根据控制电压控制变形镜产生特定面型补偿像差,并且将此时变形镜面型记录下来作为初始面型,即完成像差校正。
12.本发明的有益效果是:
13.本技术可以解决共光路以及信标光接收光路初始像差较差的情况,通过控制变形镜产生特定的初始补偿面型,能够有效地消除共光路与信标光接收光路的静态像差,提高ccd接收信标光的光斑质量,有利于追踪的实现。
附图说明
14.图1为本技术全光路系统结构示意图;
15.图2为psf评价函数定义示意图;
16.图3为光路二100组随机波前波前rms改善情况示意图。
具体实施方式
17.需要特别说明的是,在不冲突的情况下,本技术公开的各个实施方式之间可以相互组合。
18.具体实施方式一:参照图1具体说明本实施方式,本实施方式所述的空间光通信小型化终端静态像差校正方法,所述方法包括:
19.步骤一:构建全光路模块,所述全光路系统包括三条光路:
20.光路一:入射信标光依次经过望远镜、跟瞄系统和压电变形镜,经过压电变形镜后的信标光通过第一分束器后进行缩束,缩束后进入夏克-哈特曼波前探测器;
21.光路二:入射光依次经过望远镜、跟瞄系统和压电变形镜,经过压电变形镜后的信标光通过第一分束器后进入第二分束器,第二分束器输出的信标光经过聚焦透镜输出后进入ccd2;
22.光路三:入射光依次经过望远镜、跟瞄系统和压电变形镜,经过压电变形镜后的信标光通过第一分束器后进入第二分束器,进入第二分束器的信标光依次通过第三分束器、聚焦透镜、多模光纤后进入雪崩光电二极管;
23.步骤二:根据构建好的全光路模块,解算出ccd2上的光斑压电变形镜补偿面型的控制电压;
24.步骤三:根据控制电压控制变形镜产生特定面型补偿像差,并且将此时变形镜面型记录下来作为初始面型,即完成像差校正。
25.具体实施方式二:本实施方式是对具体实施方式一的进一步说明,本实施方式与具体实施方式一的区别是所述步骤二的具体步骤为:
26.步骤二一:打开望远镜,望远镜接收对向入射光;
27.步骤二二:对压电变形镜电极施加初始电压u0={0,0,
…
0};
28.步骤二三:利用ccd2上的像素点计算评价函数jk(uk),其中,
29.ii为ccd2圆盘中心,ii直径为λ为信标光波长,λ为808nm,f为ccd2前透镜焦距,f为20mm,d为透镜孔径,d为10mm,io为ccd2中去掉圆盘中心ii的圆环,io直径为j为评价函数,k表示第k次迭代结果,u表示压电变形镜控制电压向量;
30.步骤二四:随机产生满足伯努利分布的扰动向量δuk;
31.步骤二五:对压电变形镜电极分别再施加正二分之一扰动向量δuk和负二分之一扰动向量δuk,然后分别读取雪崩光电二极管的接收功率p,并通过公式j=-p计算评价函数
和
32.步骤二六:根据和得到评价函数的变化δjk:
33.步骤二七:根据扰动向量δuk和评价函数的变化δjk得到u
k 1
;
34.步骤二八:判断k的值,若k》500则输出最终优化出的电压u
*
,若k《=500则令uk=u
k 1
,重复步骤二二至步骤二七;
35.步骤二九:将变形镜电压设置成u
*
,完成像差校正。
36.具体实施方式三:本实施方式是对具体实施方式二的进一步说明,本实施方式与具体实施方式二的区别是所述评价函数的变化δjk表示为:
[0037][0038]
具体实施方式四:本实施方式是对具体实施方式三的进一步说明,本实施方式与具体实施方式三的区别是所述u
k 1
表示为:
[0039]uk 1
=u
k-γδjkδuk[0040]
其中,γ为增益系数。
[0041]
具体实施方式五:本实施方式是对具体实施方式四的进一步说明,本实施方式与具体实施方式四的区别是所述压电变形镜包括43个电极,包括主反射镜上的40个电极和3个独立的俯仰/倾斜电极。
[0042]
具体实施方式六:本实施方式是对具体实施方式五的进一步说明,本实施方式与具体实施方式五的区别是所述压电变形镜工作波段为450nm-20μm。
[0043]
具体实施方式七:本实施方式是对具体实施方式六的进一步说明,本实施方式与具体实施方式六的区别是所述压电变形镜最高刷新率为4khz。
[0044]
具体实施方式八:本实施方式是对具体实施方式七的进一步说明,本实施方式与具体实施方式七的区别是所述夏克-哈特曼波前探测器探测波段为400~900nm,口径为4.5mm,微透镜个数≤700,尺寸为150μm,焦距为10mm。
[0045]
具体实施方式九:本实施方式是对具体实施方式八的进一步说明,本实施方式与具体实施方式八的区别是所述雪崩光电二极管的探测波段为850-1650nm。
[0046]
具体实施方式十:本实施方式是对具体实施方式九的进一步说明,本实施方式与具体实施方式九的区别是所述入射光为激光二极管。
[0047]
空间光通信小型化终端中共光路与信标光接收光路静态像差校正原理光路图如图1所示。假设入射光是平面波,则被ccd2接收的光束恰好既包含了共光路的静态像差信息,又包含了光路(2)的静态像差信息。对向入射信标光被望远镜接收,经过跟瞄系统和变形镜进入bs1,分为两束,一束进入光路(1),缩束,被sh-wfs探测,一束进入光路(2)被ccd2接收。如果通过ccd2上的光斑得知波前像差,然后控制变形镜产生特定面型补偿这一像差,并且将此时变形镜面型记录下来作为初始面型,就能校正共光路与信标光接收光路的静态像差。但是,由于小型化通信终端的体积、质量、功耗等限制,通信终端不能额外提供参考平面波。本发明认为天气状态良好的情况下,对向入射信标光只有较小的像差,所以可以将对向入射信标光作为参考光波。
[0048]
在这个过程中,如何通过ccd2上的光斑解算出变形镜补偿面型的控制电压是关键
问题。通常认为这是一个优化问题,采用随机并行梯度下降法进行迭代求解,具体的迭代表达式如公式(1)所示。
[0049]uk 1
=u
k-γδjkδukꢀꢀꢀ
(1)
[0050]
其中上标k与k 1分别表示第k次迭代结果与第k 1次迭代结果,u={u1,u2,
…
un}为变形镜控制电压向量,n为促动器个数,j为评价函数,γ为增益系数。δu={δu1,δu2,
…
δun}为施加的随机扰动向量,评价函数变化值为δj,
[0051]
δj=j
-j-=j(u δu/2)-j(u-δu/2)
ꢀꢀꢀ
(2)
[0052]
评价函数的选取在算法中也十分重要,由于平面波入射成像相当于点光源成像,所以可以选取点扩散函数作为评价函数。点扩散函数就是输入物为一点光源时其输出像的光场分布,一个完美的psf由一个明亮的艾里圆盘组成,圆盘周围有最小的衍射条纹。如果出现波前像差,更多的强度能量将被推入衍射条纹,从而降低艾里圆盘中的能量,所以我们给出评价函数j的表达式如下,
[0053][0054]
其中,ii为艾里圆盘内各像素点的光强,i0为圆盘周围衍射条纹各像素点的光强,如图2所示,
[0055]
本发明对共光路与信标光接收光路静态像差的校正步骤如下:
[0056]
打开望远镜,使通信终端能够接收对向入射光,通信终端停止其他工作,开始进行静态像差校正,使用计算机完成步骤(2)~(8);
[0057]
对可变形压电变形镜43个电极施加初始电压u0={0,0,
…
0},u[1:40]为主反射镜上的40个致动器的控制电压,u[41:43]为3个独立的俯仰/倾斜致动器臂的控制电压;
[0058]
利用ccd2上的像素点,根据公式(3)和图2计算评价函数jk(uk),ii圆盘中心为ccd中心,直径为λ为信标光波长805nm,f为ccd2前透镜焦距20mm,d为透镜孔径10mm,io为直径为中心为ccd中心、去掉ii部分的圆环;
[0059]
随机产生满足伯努利分布的随机扰动向量δuk={δu1,δu2,
…
δu
43
};
[0060]
利用ccd2上的像素点,根据公式(3)计算评价函数和
[0061]
通过公式(2)计算δjk;
[0062]
通过公式(1)计算u
k 1
;
[0063]
判断k的值,若k》500则输出最终优化出的电压u
*
,若k《=500则令uk=u
k 1
,重复(2)~(7)过程;
[0064]
将优化后的电压u
*
保存在计算机硬盘中;
[0065]
将变形镜电压设置成u
*
,通信终端恢复正常工作。
[0066]
空间光通信小型化终端中共光路与信标光接收光路静态像差校正装置具体实现方案如下:
[0067]
变形镜为thorlab公司型号为dmh40-p01的可变形压电变形镜,有保护层的银膜,工作波段为450nm-20μm,光瞳,具有大行程,最高刷新率为4khz,43个致动器(主反射镜上的40个致动器和3个独立的俯仰/倾斜致动器臂)。
[0068]
sh-wfs选取oko公司型号为ui-2210m的波前探测器,探测类型是ccd探测,探测波段为400~900nm,口径为4.5mm,微透镜个数≤700,尺寸为150μm,焦距为10mm。
[0069]
测试计算机为一个电脑服务器,cpu为i7 4630k(6x3.4ghz avec 12mo llc,2mo l2total),主板asus x79-deluxe,硬盘samsung ssd 840pro 256gb,显卡为gainward geforce gt730 2gb ddr3 silent fx,内存为gskill 16gb(4x4)quad channel f3-14900cl9q-16gbzl。
[0070]
信标光源使用型号为ml620g40的激光二极管,波长为808nm,输出光功率为150mw,典型驱动电流为180ma,最大220ma,尺寸为
[0071]
探测器使用的是型号为apd310的雪崩光电二极管,探测波段为850-1650nm,3db带宽是5-1000mhz,在1550nm波长下的响应度为0.9a/w。
[0072]
需要注意的是,具体实施方式仅仅是对本发明技术方案的解释和说明,不能以此限定权利保护范围。凡根据本发明权利要求书和说明书所做的仅仅是局部改变的,仍应落入本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。