技术特征:
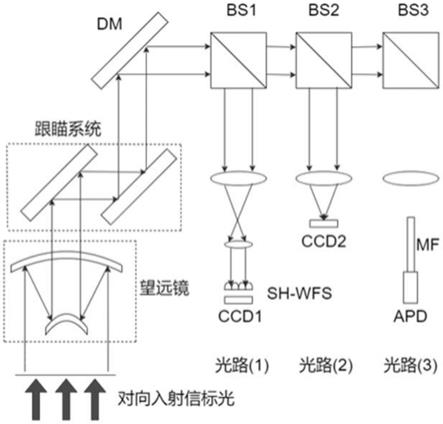
1.空间光通信小型化终端静态像差校正方法,其特征在于所述方法包括:步骤一:构建全光路模块,所述全光路系统包括三条光路:光路一:入射光依次经过望远镜、跟瞄系统和压电变形镜,经过压电变形镜后的信标光通过第一分束器后进行缩束,缩束后进入夏克-哈特曼波前探测器;光路二:入射光依次经过望远镜、跟瞄系统和压电变形镜,经过压电变形镜后的信标光通过第一分束器后进入第二分束器,第二分束器输出的信标光经过聚焦透镜输出后进入ccd2;光路三:入射光依次经过望远镜、跟瞄系统和压电变形镜,经过压电变形镜后的信标光通过第一分束器后进入第二分束器,进入第二分束器的信标光依次通过第三分束器、聚焦透镜、多模光纤后进入雪崩光电二极管;步骤二:根据构建好的全光路模块,解算出ccd2上的光斑压电变形镜补偿面型的控制电压;步骤三:根据控制电压控制变形镜产生特定面型补偿像差,并且将此时变形镜面型记录下来作为初始面型,即完成像差校正。2.根据权利要求1所述的空间光通信小型化终端静态像差校正方法,其特征在于所述步骤二的具体步骤为:步骤二一:打开望远镜,望远镜接收对向入射光;步骤二二:对压电变形镜电极施加初始电压u0={0,0,...0};步骤二三:利用ccd2上的像素点计算评价函数j
k
(u
k
),其中,i
i
为ccd2圆盘中心,i
i
直径为λ为信标光波长,λ为808nm,f为ccd2前透镜焦距,f为20mm,d为透镜孔径,d为10mm,i
o
为ccd2中去掉圆盘中心i
i
的圆环,i
o
直径为j为评价函数,k表示第k次迭代结果,u表示压电变形镜控制电压向量;步骤二四:随机产生满足伯努利分布的扰动向量δu
k
;步骤二五:对压电变形镜电极分别再施加正二分之一扰动向量δu
k
和负二分之一扰动向量δu
k
,然后分别读取雪崩光电二极管的接收功率p,并通过公式j=-p计算评价函数和步骤二六:根据和得到评价函数的变化δj
k
:步骤二七:根据扰动向量δu
k
和评价函数的变化δj
k
得到u
k 1
;步骤二八:判断k的值,若k>500则输出最终优化出的电压u
*
,若k<=500则令u
k
=u
k 1
,重复步骤二二至步骤二七;步骤二九:将变形镜电压设置成u
*
,完成像差校正。3.根据权利要求2所述的空间光通信小型化终端静态像差校正方法,其特征在于所述评价函数的变化δj
k
表示为:4.根据权利要求3所述的空间光通信小型化终端静态像差校正方法,其特征在于所述u
k 1
表示为:
u
k 1
=u
k-γδj
k
δu
k
其中,γ为增益系数。5.根据权利要求4所述的空间光通信小型化终端静态像差校正方法,其特征在于所述压电变形镜包括43个电极,包括主反射镜上的40个电极和3个独立的俯仰/倾斜电极。6.根据权利要求5所述的空间光通信小型化终端静态像差校正方法,其特征在于所述压电变形镜工作波段为450nm-20μm。7.根据权利要求6所述的空间光通信小型化终端静态像差校正方法,其特征在于所述压电变形镜最高刷新率为4khz。8.根据权利要求7所述的空间光通信小型化终端静态像差校正方法,其特征在于所述夏克-哈特曼波前探测器探测波段为400~900nm,口径为4.5mm,微透镜个数≤700,尺寸为150μm,焦距为10mm。9.根据权利要求8所述的空间光通信小型化终端静态像差校正方法,其特征在于所述雪崩光电二极管的探测波段为850-1650nm。10.根据权利要求9所述的空间光通信小型化终端静态像差校正方法,其特征在于所述入射光为激光二极管。
技术总结
空间光通信小型化终端静态像差校正方法,涉及通信终端技术领域,针对现有技术中共光路以及信标光接收光路初始像差较差的情况下,会导致CCD接收信标光的光斑质量较差,不利于追踪功能的实现的问题,本申请可以解决共光路以及信标光接收光路初始像差较差的情况,通过控制变形镜产生特定的初始补偿面型,能够有效地消除共光路与信标光接收光路的静态像差,提高CCD接收信标光的光斑质量,有利于追踪的实现。有利于追踪的实现。有利于追踪的实现。
技术研发人员:于思源 陈阳 杨兴昊
受保护的技术使用者:哈尔滨工业大学
技术研发日:2022.01.18
技术公布日:2022/4/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。