1.本技术属于油气装备技术领域,具体涉及一种切割设备。
背景技术:
2.在石油天然气井控灭火抢险的情况下,为迅速有效地处理井喷失控,避免油气资源浪费,需要采用水力喷砂切割法在带火的情况下实施远距离切割已损坏的井口装置、管柱、废井架等,使井口多向喷油(气)变成单柱向上喷油(气),而后换装新的井口装置,实施关井作业。
3.现场切割作业区域温度超过1200℃,且泄露的油(气)导致现场工作人员无法近距离切割作业,需要通过远程控制方式对井口装置进行远距离切割清障、吊装引火筒、换装新井口等操作。
4.当前切割作业采用机动车和桅杆结构形式,通过控制钢丝绳对切割装置进行调节,使得调节精度较低,且无法满足远距离切割的要求,从而使得切割作业难度大,效率低,导致油气资源大量浪费。
技术实现要素:
5.本技术实施例的目的是提供一种切割设备,能够解决当前切割方式调节精度低、无法满足远距离切割要求,导致切割难度大、切割效率低等问题。
6.为了解决上述技术问题,本技术是这样实现的:
7.本技术实施例提供了一种切割设备,该切割设备包括:底盘、吊臂装置、切割装置和驱动装置;
8.所述吊臂装置包括起重臂和支撑臂组件,所述起重臂转动设置于所述底盘,所述支撑臂组件与所述起重臂转动连接,所述切割装置设置于所述支撑臂组件;
9.所述驱动装置设置于所述底盘或所述起重臂,且所述驱动装置的输出端与所述支撑臂组件连接,用于驱动所述支撑臂组件相对于所述起重臂转动。
10.可选地,所述支撑臂组件包括第一支撑臂和第二支撑臂;
11.所述第一支撑臂的一端通过铰链连接于所述起重臂,所述第一支撑臂的另一端与所述第二支撑臂连接,且所述第一支撑臂与所述第二支撑臂呈夹角设置,所述切割装置设置于所述第二支撑臂。
12.可选地,所述切割装置移动设置于所述第二支撑臂;
13.所述第二支撑臂设有第一调节模组,所述第一调节模组与所述切割装置连接,所述第一调节模组被配置为驱动所述切割装置沿所述第二支撑臂的延伸方向双向移动。
14.可选地,所述第一调节模组包括第一液压马达和第一传动丝杆,所述第一液压马达设置于所述第二支撑臂的远离所述切割装置的一端,所述第一传动丝杆沿所述第二支撑臂的延伸方向设置,并与所述第一液压马达传动连接,所述切割装置与所述第一传动丝杆传动连接。
15.可选地,所述切割装置包括沿第一方向延伸的框架、沿第二方向滑动设置于框架的滑台,以及设置于滑台的切割喷嘴;
16.所述第二支撑臂设有第二调节模组,所述第二调节模组与所述滑台传动连接,所述第二调节模组被配置为驱动所述滑台沿所述第二方向双向移动;
17.所述第一方向、所述第二方向及所述第二支撑臂的延伸方向两两垂直。
18.可选地,所述第二调节模组包括第二液压马达、可伸缩的第一传动轴、链条传动组件、第一直角减速机、第二传动轴、第二直角减速机和第二传动丝杆;
19.所述第二液压马达设置于所述第二支撑臂的远离所述切割装置的一端,所述第一传动轴沿所述第二支撑臂的延伸方向设置,并与所述链条传动组件传动连接,所述链条传动组件与所述第一直角减速机传动连接,所述第二传动轴沿所述第一方向延伸,并传动连接于所述第一直角减速机和所述第二直角减速机之间,所述第二传动丝杆沿所述第二方向延伸,并与第二直角减速机及所述滑台分别传动连接。
20.可选地,所述框架设有定位架,所述定位架包括第一定位结构和第二定位结构,所述第一定位结构与所述第二定位结构呈夹角设置,且两者之间围设呈容纳空间。
21.可选地,所述第二支撑臂包括多个桁架单元,相邻两个所述桁架单元之间可拆卸连接。
22.可选地,所述驱动装置至少部分设置于所述底盘,所述驱动装置包括吊装绳索,所述吊装绳索的一端与所述支撑臂组件连接,且所述吊装绳索的两端之间的区域与所述起重臂连接。
23.可选地,所述切割设备还包括供液装置和供液管汇;
24.所述供液管汇包括第一管和第二管,所述第一管与所述供液装置连接,所述第二管的一端连接所述第一管,所述第二管的另一端连接所述切割装置的切割喷嘴,所述第二管为挠性管。
25.本技术实施例中,通过起重臂和支撑臂组件可以实现对切割装置的支撑,并且,通过调节起重臂的角度以及通过驱动装置调节支撑臂组件的角度,从而可以实现对切割装置位置的调节,以便于切割装置能够更加精确地到达切割地点;与此同时,起重臂和支撑臂组件组成的吊臂装置可以使切割装置距离底盘的距离相对较远,使得操作人员在底盘处操作时,基本不会受到油气泄露以及切割作业的影响,从而实现了远距离切割,保证了操作人员的身心健康。基于上述设置,本技术实施例中的切割设备能够更加精确地到达切割地点,提高了切割效率和切割精度,并且可以实现远距离切割,保证操作人员安全。
附图说明
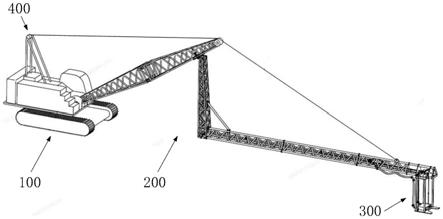
26.图1为本技术实施例公开的切割设备的第一视角的结构示意图;
27.图2为本技术实施例公开的切割设备的第二视角的结构示意图;
28.图3为本技术实施例公开的支撑臂组件及切割装置的结构示意图;
29.图4为本技术实施例公开的支撑臂组件与起重臂的连接处的结构示意图;
30.图5为本技术实施例公开的第一调节模组与切割装置的结构示意图;
31.图6为本技术实施例公开的切割装置的俯视图;
32.图7为本技术实施例公开的第二调节模组及切割装置的结构示意图;
33.图8为本技术实施例公开的切割设备切割地面上井口装置的示意图;
34.图9为本技术实施例公开的切割设备切割地面下井口装置的示意图。
35.附图标记说明:
36.100-底盘;
37.200-吊臂装置;210-起重臂;220-支撑臂组件;221-第一支撑臂;222-第二支撑臂;2221-桁架单元;230-铰链;
38.300-切割装置;310-框架;320-滑台;330-切割喷嘴;340-定位架;341-第一定位结构;342-第二定位结构;
39.400-驱动装置;410-吊装绳索;
40.500-第一调节模组;510-第一液压马达;520-第一传动丝杆;
41.600-第二调节模组;610-第二液压马达;620-第一传动轴;630-链条传动组件;640-第一直角减速机;650-第二传动轴;660-第二直角减速机;670-第二传动丝杆;
42.710-第一管;720-第二管;
43.m-容纳空间。
具体实施方式
44.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
45.本技术的说明书和权利要求书中的术语“第一”、“第二”等是用于区别类似的对象,而不用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便本技术的实施例能够以除了在这里图示或描述的那些以外的顺序实施,且“第一”、“第二”等所区分的对象通常为一类,并不限定对象的个数,例如第一对象可以是一个,也可以是多个。此外,说明书以及权利要求中“和/或”表示所连接对象的至少其中之一,字符“/”,一般表示前后关联对象是一种“或”的关系。
46.下面结合附图,通过具体的实施例及其应用场景对本技术实施例进行详细地说明。
47.参考图1至图9,本技术实施例公开了一种切割设备,所公开的切割设备包括底盘100、吊臂装置200、切割装置300和驱动装置400。
48.其中,底盘100为切割设备的支撑部分,其可以用于支撑、安装吊臂装置200和驱动装置400等。可选地,底盘100可以为行走底盘,通过行走底盘可以使切割设备运动,从而可以针对不同地点的待切割位置进行切割。
49.吊臂装置200为切割设备中用于连接切割装置300和底盘100的部分。一些实施例中,吊臂装置200包括起重臂210和支撑臂组件220,其中,起重臂210转动设置于底盘100,支撑臂组件220与起重臂210转动连接,切割装置300设置于支撑臂组件220。
50.可选地,起重臂210与底盘100之间可以通过转轴连接,且起重臂210与底盘100的转动轴线呈水平设置,使得起重臂210可以相对于底盘100俯仰转动,以调节起重臂210的俯仰角度。起重臂210与底盘100之间可以连接液压缸,从而通过液压缸可以驱动起重臂210相
对于底盘100俯仰转动,以调节起重臂210的俯仰角度。另外,支撑臂组件220的一端与起重臂210的转动轴线呈水平设置,使得支撑臂组件220可以相对起重臂210俯仰转动,以调节支撑臂组件220的俯仰角度。切割装置300位于支撑臂组件220的背离起重臂210的一端,如此,可以使切割装置300尽可能地远离底盘100,以缓解切割过程对底盘100处的操作人员的安全产生威胁。
51.基于上述设置,通过支撑臂组件220相对于起重臂210转动,以及起重臂210相对于底盘100转动,可以调节切割装置300的切割高度、位置,并使切割装置300处于预设状态,从而可以对多种不同工况的待切割位置进行切割。
52.由于支撑臂组件220与起重臂210转动连接,为防止支撑臂组件220随意转动,以及调节支撑臂组件220相对于起重臂210的转动角度,本技术实施中,驱动装置400设置于底盘100或起重臂210,且驱动装置400的输出端与支撑臂组件220连接,用于驱动支撑臂组件220相对于起重臂210转动。
53.可选地,驱动装置400可以采用液压缸、吊装机构等结构,当驱动装置400为液压缸时,其一端连接于起重臂210,另一端连接于支撑臂组件220,以驱动支撑臂组件220相对于起重臂210转动;当驱动装置400为吊装机构时,其包括绞车,绞车安装在底盘100上。本技术实施例中不限制驱动装置400的具体结构,只要能够驱动支撑臂组件220转动即可。
54.此处需要说明的是,在切割设备用于切割油气领域的井口时,需要使切割装置300的切割端时刻处于水平状态,基于此,需要对支撑臂组件220的形状进行设计,以满足上述要求。可选地,可以将支撑臂组件220设计为l形,其中,将l形的支撑臂组件220的一端与起重臂210转动连接,切割装置300设置在l形的支撑臂组件220的另一端。如此,当需要调节切割装置300的高度时,需要综合调节起重臂210相对于底盘100的俯仰角度,以及支撑臂组件220相对于起重臂210的夹角,从而可以满足切割装置300的切割端处于水平状态,进而满足切割要求。与此同时,在调节起重臂210相对于底盘100的俯仰角度,以及支撑臂组件220与起重臂210之间的夹角时,切割装置300在水平方向上的位置发生移动,从而可以实现切割装置300在水平方向上位置的调节。
55.本技术实施例中,通过起重臂210和支撑臂组件220可以实现对切割装置300的支撑,并且,通过调节起重臂210的角度以及通过驱动装置400调节支撑臂组件220的角度,从而可以实现对切割装置300位置的调节,以便于切割装置300能够更加精确地到达切割地点;与此同时,起重臂210和支撑臂组件220组成的吊臂装置200可以使切割装置300距离底盘100的距离相对较远,使得操作人员在底盘100处操作时,基本不会受到油气泄露以及切割作业的影响,从而实现了远距离切割,保证了操作人员的身心健康。基于上述设置,本技术实施例中的切割设备能够更加精确地到达切割地点,提高了切割效率和切割精度,并且可以实现远距离切割,保证操作人员安全。
56.参考图2至图4,在一些实施例中,支撑臂组件220包括第一支撑臂221和第二支撑臂222,其中,第一支撑臂221的一端通过铰链230连接于起重臂210,以使第一支撑臂221可以通过铰链230相对于起重臂210转动。
57.可选地,铰链230可以包括第一固定板、第二固定板和销轴,其中,第一固定板和第二固定板分别夹在起重臂210上,从而实现固定,第二固定板的背离第一固定板的一侧设有第一连接耳,相应地,第一支撑臂221的端部设有第二连接耳,在安装时,将销轴穿过第一连
接耳和第二连接耳,以实现第一支撑臂221与起重臂210的转动连接。当然,铰链230还可以采用其他结构形式,本技术实施例中不限制铰链230的具体结构。
58.基于上述设置,通过铰链230可以实现第一支撑臂221与起重臂210的转动连接,除此以外,第一固定板与第二固定板之间可以通过螺栓紧固,而销轴可以从第一连接耳和第二连接耳中取出。如此,可以实现第一支撑臂221与起重臂210的快速拆卸或安装,提高了设备拆装效率。因此,在切割工作结束后,可以快速将支撑臂组件220与起重臂210分离,以便于利用底盘100、起重臂210和驱动装置400,实现现场的清障及吊装引火筒等操作。
59.第一支撑臂221的另一端与第二支撑臂222连接。可选地,可以采用焊接、铆接等固定方式实现连接,当然,还可以通过螺接等可拆卸方式实现连接。
60.参考图3,为保证第一支撑臂221与第二支撑臂222连接的稳定性、牢固性,还可以在第一支撑臂221和第二支撑臂222之间连接加强件,其中,加强件可以是加强杆、加强筋等结构。一些实施例中,第一支撑臂221与第二支撑臂222垂直连接,形成l形结构,此时,加强件位于l形结构的内侧,并分别与第一支撑臂221和第二支撑臂222分别连接,从而可以起到加强作用,保证两者之间连接的稳定性和牢固性。
61.第一支撑臂221与第二支撑臂222呈夹角设置。可选地,两者之间的夹角范围可以是70
°
至110
°
,包括70
°
、80
°
、90
°
、100
°
、110
°
等,当然,还可以是其他度数,本技术实施例中不限制该夹角的具体度数值。
62.切割装置300设置于第二支撑臂222。可选地,为了使切割装置300尽可能远离底盘100,可以将切割装置300设置在第二支撑臂222的远离第一支撑臂221的一端部,从而可以保证切割装置300距离底盘100最远,从而可以最大限度地保证位于底盘100处操作的人员的人身安全。
63.基于上述设置,当第一支撑臂221与第二支撑臂222之间的夹角为90
°
时,可以通过调节第一支撑臂221与起重臂210之间的夹角,以及起重臂210与底盘100之间的夹角,使第二支撑臂222在运动过程中时刻处于水平状态。如此,可以保证设置于第二支撑臂222的切割装置300随第二支撑臂222平动,如,水平移动、竖直移动、水平和竖直同时移动等等,从而满足切割要求。
64.为了使切割装置300相对于第二支撑臂222移动,本技术实施例中,切割装置300可移动地设置于第二支撑臂222。可选地,可以在第二支撑臂222上设置沿第二支撑臂222延伸方向设置的滑轨,切割装置300与滑轨滑动连接,如此,可以使切割装置300沿第二支撑臂222的延伸方向移动,以调节切割装置300的位置。
65.参考图5,切割设备还包括第一调节模组500,第一调节模组500设置在第二支撑臂222上,且第一调节模组500与切割装置300连接,如此,通过第一调节模组500可以驱动切割装置300沿第二支撑臂222的延伸方向双向移动,进而调节切割装置300的位置。此处需要说明的是,上述双向移动即包括:朝向第二支撑臂222的第一端移动,或朝向第二支撑臂222的第二端移动,也即,相对于第二支撑臂222往复移动。
66.在一些实施例中,第一调节模组500包括第一液压马达510和第一传动丝杆520,第一液压马达510设置于第二支撑臂222的远离切割装置300的一端,第一传动丝杆520沿第二支撑臂222的延伸方向设置,并与第一液压马达510传动连接,切割装置300与第一传动丝杆520传动连接。基于此,在第一液压马达510的驱动作用下,第一传动丝杆520旋转,第一传动
丝杆520带动切割装置300进行移动,以使切割装置300沿第二支撑臂222的延伸方向移动,从而可以调节切割装置300的水平位置,进而可以对切割装置300与待切割设备在水平方向上尺寸进行微调,以保证切割精度。
67.在其他实施例中,第一调节模组500还可以是其他形式的直线模组,包括电动缸、电机和丝杆组件、液压杆等,本技术实施例不限制第一调节模组500的具体形式。
68.由于第一液压马达510远离切割装置300,使得第一液压马达510远离切割高温作业区域,从而可以提升切割设备的耐高温性能。
69.参考图5至图7,在一些实施例中,切割装置300包括沿第一方向延伸的框架310、沿第二方向滑动设置于框架310的滑台320,以及设置于滑台320的切割喷嘴330,可选地,切割喷嘴330固定在滑台320上。上述第一方向、第二方向及第二支撑臂222的延伸方向两两垂直。在切割设备处于运行状态下,第二支撑臂222沿水平方向延伸,如,第二支撑臂222沿左右方向延伸,此时,第一方向为竖直方向,而第二方向为前后方向。
70.为了调节切割喷嘴330在第二方向上的位置,本技术实施例中的切割设备还包括第二调节模组600,该第二调节模组600设置于第二支撑臂222上,第二调节模组600与滑台320传动连接,如此,通过第二调节模组600可以驱动滑台320沿第二方向双向移动,并由滑台320同步带动切割喷嘴330沿第二方向往复移动,从而实现对待切割位置的切割作业。此处需要说明的是,上述双向移动即包括:沿第二方向移动,或沿与第二方向相反的方向移动。
71.参考图7,在一些实施例中,第二调节模组600包括第二液压马达610、可伸缩的第一传动轴620、链条传动组件630、第一直角减速机640、第二传动轴650、第二直角减速机660和第二传动丝杆670。其中,第二液压马达610设置于第二支撑臂222的远离切割装置300的一端,可伸缩的第一传动轴620沿第二支撑臂222的延伸方向设置,并与链条传动组件630传动连接,链条传动组件630与第一直角减速机640传动连接,第二传动轴650沿第一方向延伸,并传动连接于第一直角减速机640和第二直角减速机660之间,第二传动丝杆670沿第二方向延伸,并与第二直角减速机660及滑台320分别传动连接。
72.基于上述设置,在第二液压马达610的驱动作用下,第一传动轴620旋转,并带动链条传动组件630运动,链条传动组件630带动第一直角减速机640运动,第一直角减速机640带动第二传动轴650旋转,第二传动轴650带动第二直角减速机660运动,第二直角减速机660带动第二传动丝杆670旋转,第二传动丝杆670带动滑台320沿第二方向双向移动,从而可以实现切割喷嘴330的移动,以实现切割和回位。
73.由于第二液压马达610远离切割装置300,使得第二液压马达610远离切割高温作业区域,从而可以提升切割设备的耐高温性能。
74.考虑到切割装置300可以沿第二支撑臂222的延伸方向双向移动而调节切割装置300的位置,本技术实施例中将第一传动轴620设计为可伸缩形式,从而可以适应切割装置300沿第二支撑臂222的延伸方向双向移动,以防止运动干涉。可选地,第一传动轴620可以包括两个轴段,其中一个轴段插入另一个轴段中,且两个轴段之间通过花键连接,如此,既可以实现伸缩,又可以传输运动和动力。
75.链条传动组件630可以将第一传动轴620上的运动和动力传递到与第一传动轴620平行的第一直角减速机640的输入轴,从而可以改变动力传输构件的位置,以适应不同构件
的布置情况。可选地,链条传动组件630可以包括两个链轮,两个链轮间隔设置,且两个链轮各自的轴平行,两个链轮之间连接链条,以通过链条传输运动和动力。
76.第一直角减速机640用于将水平轴转换为竖直轴,从而改变运动和动力的传输方向。
77.第二传动轴650沿设置方向延伸,将第一直角减速机640的运动和动力传输至第二直角减速机660。可选地,第二传动轴650可以包括多个轴段,且多个轴段之间通过万向节连接,以便于调节延伸方向,并满足运动和动力的传输要求。
78.第二直角减速机660用于将竖直轴转换为水平轴,从而改变运动和动力的传输方向。
79.为提高切割效率,一些实施例中可以设置两套切割喷嘴330,相应地,对应设置两套滑台320和两套第二调节模组600,通过两套第二调节模组600分别对应驱动滑台320移动,并由滑台320对应带动其上的切割喷嘴330移动,从而可以通过两个切割喷嘴330同时切割作业,以提高切割效率、缩短切割时间。
80.在其他实施例中,第二调节模组600还可以是其他形式,本技术实施例不限制第二调节模组600的具体形式。
81.参考图5和图6,为保证切割精度,一些实施例中,框架310设有定位架340,通过定位架340可以对待切割设备进行定位,以确定切割位置。可选地,定位架340包括第一定位结构341和第二定位结构342,第一定位结构341和第二定位结构342呈夹角设置,且两者之间形成容纳空间m。
82.可选地,第一定位结构341和第二定位结构342可以形成v型的容纳空间m,如此,通过v型的容纳空间m可以实现对待切割设备的机械定位,以确定最终切割喷嘴330与待切割设备的切割相对位置,实现最终定位。
83.可选地,定位架340可以固定于框架310的背离第二支撑臂222的一端,例如,焊接、螺接、铆接等固定方式。定位架340可以采用一体成型,以缩短制造周期。
84.参考图3,在一些实施例中,第二支撑臂222包括多个桁架单元2221,相邻两个桁架单元2221之间可拆卸连接。基于此,可以实现第二支撑臂222的模块化设计,从而可以根据现场实际情况,快速调节第二支撑臂222的长度,进而可以快速调节切割装置300的远程切割尺寸。
85.可选地,桁架单元2221的端部可以设置法兰,通过螺栓等紧固件可以将法兰固定,从而实现相邻的两个桁架单元2221的可拆卸连接。当然,还可以直接通过螺栓等紧固件将相邻两个桁架单元2221连接。本技术实施例不限制具体的连接方式,只要方便拆装即可。
86.参考图1和图2,在一些实施例中,驱动装置400包括吊装绳索410,其中,驱动装置400至少部分设置于底盘100,吊装绳索410的一端与支撑臂组件220连接,且吊装绳索410的两端之间的区域与起重臂210连接。
87.可选地,驱动装置400可以包括绞车和吊装绳索410,吊装绳索410的一端绕设在绞车的轮盘上,另一端与支撑臂组件220连接,而吊装绳索410的两端之间的区域与起重臂210的背离底盘100的端部连接,例如,在起重臂210的背离底盘100的端部设置滑轮,将吊装绳索410绕设滑轮后与支撑臂组件220连接,使得起重臂210可以对吊装绳索410起到支撑作用。如此,在绞车收卷吊装绳索410时,通过吊装绳索410拉动支撑臂组件220,使支撑臂组件
220相对于起重臂210向上转动,以调节支撑臂组件220与起重臂210之间的夹角(如,增大支撑臂组件220与起重臂210之间的夹角),以及调节切割装置300的高度(如,升高切割装置300)。当绞车释放吊装绳索410时,在重力作用下,支撑臂组件220相对于起重臂210向下转动,以调节支撑臂组件220与起重臂210之间的夹角(如,减小支撑臂组件220与起重臂210之间的夹角),以及调节切割装置300的高度(如,降低切割装置300)。
88.一些实施例中,吊装绳索410的一端与第二支撑臂222连接。基于此,吊装绳索410可以对第二支撑臂222施加吊装作用力,一方面可以使第二支撑臂222及其上的切割装置300保持不动,或者驱动第二支撑臂222及其上的切割装置300运动,以满足切割要求,另一方面,吊装绳索410与第二支撑臂222的连接处远离第一支撑臂221与起重臂210的铰接处,从而可以增大吊装力臂,在吊装同等重量的情况下,吊装绳索410上的吊装作用力更小,从而可以减小驱动装置400的输出功率,并且可以使吊装绳索410不易被拉断。
89.参考图2,在一些实施例中,第一支撑臂221与第二支撑臂222相互垂直,切割装置300与第二支撑臂222垂直,且切割装置300的延伸方向与第一支撑臂221的延伸方向相反,如此,第一支撑臂221、第二支撑臂222和切割装置300三者形成z形结构,从而可以满足多种工况需求。
90.在切割设备处于工作状态的情况下,第二支撑臂222沿水平方向延伸,第一支撑臂221和切割装置300分别沿竖直方向延伸,此时,第一支撑臂221的上端与起重臂210通过铰链230连接,切割装置300的下端为切割端,从而可以通过切割端对较低处的待切割位置进行切割作业,以满足工况需求。
91.参考图3,为了实现水力喷砂切割,本技术实施例中的切割设备还包括供液装置和供液管汇。其中,供液管汇包括第一管710和第二管720,第一管710与供液装置连接,第二管720的一端连接第一管710,另一端连接切割装置300的切割喷嘴330。基于此,通过供液装置可以向第一管710输送高压流体,高压流体经由第一管710流入第二管720,并由第二管720流至切割喷嘴330,最终由切割喷嘴330高速喷出,以实现对待切割设备的切割作业。可选地,供液装置可以采用压裂车,当然,还可以采用其他形式,本技术实施例中对此不作具体限定。
92.可选地,第二管720为挠性管,从而可以适应切割装置300沿第二支撑臂222的延伸方向双向移动,调节动作补偿,以防止对切割装置300的移动产生干涉。其中,第二管720可以是高压橡胶管等。
93.此处需要说明的是,供液装置的具体结构以及水力喷砂切割原理可以参考相关技术,此处不作详细阐述。
94.可选地,底盘100可以采用履带式行走底盘,包括底盘本体和车体,车体可旋转地设置在底盘本体上,从而可以实现360
°
旋转,以调节方位。起重臂210连接于车体,从而可以使起重臂210随车体旋转,进而可以实现对切割装置300的方位调节。如此,本技术实施例中的切割设备,通过履带式的底盘100和切割装置300的协同控制调整,使操作更加灵活,可适应松软、泥泞作业环境,也可以在崎岖不平的场地行驶,适合于采油井场较为恶劣的工作地势条件。
95.另外,还可以在切割作业区域设置防火隔热保护及喷淋降温系统,最大程度保证切割设备的安全性和可靠性,延长切割设备的使用寿命。
96.本技术实施例中的切割设备的具体工作过程为:
97.参考图1、图2、图8和图9,将支撑臂组件220与起重臂210通过铰链230连接,以实现切割设备的安装;驾驶员驾驶切割设备行驶至事故井口装置处,根据现场工况确定安全操作距离,实现切割装置300与待切割的井口装置的初次定位。
98.调节起重臂210与水平面之间的夹角,控制切割喷嘴330对井口装置的切割高度位置;控制驱动装置400运动,以调节支撑臂组件220与起重臂210之间的夹角,从而调节切割喷嘴330与井口装置的切割角度,控制切割喷嘴330与井口装置呈垂直工作状态,将切割装置300的切割喷嘴330移至待切割的井口大致切割位置,实现切割装置300的二次定位。
99.通过第一调节模组500驱动切割装置300沿第二支撑臂222移动,以实现切割装置300在第二支撑臂222延伸方向上的位置调节,进而实现尺寸微调。在微调过程中,使井口装置位于定位架340的容纳空间m中,通过定位架340实现对井口装置的机械定位,确定最终切割喷嘴330与井口装置的切割相对位置,实现最终定位。
100.通过第二调节模组600驱动滑台320及其上的切割喷嘴330沿第二方向移动,实现切割喷嘴330对井口装置的切割动作。
101.综上所述,本技术实施例公开的切割设备,可以实现对发生井喷事故的井口装置进行远程带火切割作业,并且可以适应不同地形的油气井场工况,包括对于地面上井口密集、井间干扰的井丛场以及位于地面以下的复杂作业环境的抢险需求。
102.上面结合附图对本技术的实施例进行了描述,但是本技术并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本技术的启示下,在不脱离本技术宗旨和权利要求所保护的范围情况下,还可做出很多形式,均属于本技术的保护之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。