1.本发明涉及机器人技术领域,尤其是指一种多足爬壁机器人。
背景技术:
2.随着经济水平的不断发展,越来越多高风险和繁重的工作被机器人所替代,如高楼建筑的幕墙的清洗;石化储罐、海洋平台和桥梁等设施的检查、质量检测、切割、焊接、打磨;船舶、飞机的除锈、喷涂以及蒙皮的检测和核设施的维护检修等,逐步由爬壁机器人取代人工来从事危险繁重作业。
3.爬壁机器人按照吸附方式不同可分为磁吸附、负压吸附和仿生吸附。按照运动方式不同可分为轮式、履带式和足式,目前磁吸附轮式和履带式爬壁机器人出现较多,并各有优缺点。磁吸附轮式爬壁机器人有着速度快、运动灵活的优点,但由于轮子与壁面接触面积小,磁能利用率低,存在吸附力不足,很难可靠吸附于壁面的缺点。磁吸附履带式爬壁人吸附力大,吸附可靠但存在转向阻力大的缺点。采用磁吸足式爬壁机器人,具有结构简单,吸附能力强、负载能力大、运动灵活、易于越障等优点。
4.对于目前的足式爬壁机器人,其关节驱动包括电动和液压驱动两种。电动方式中关节受力较小,因此机器人负载小,而液压驱动方式中需要背负液压泵站,同时连接有复杂的油液管路,使得爬壁机器人结构复杂,且体积和自重较大,导致爬壁机器人灵活性低。
技术实现要素:
5.为此,本发明所要解决的技术问题在于克服现有技术中爬壁机器人自重大、负载小,且结构复杂的缺陷,提供一种结构简单,自重小且高灵活性的多足爬壁机器人。
6.为解决上述技术问题,本发明提供了一种多足爬壁机器人,包括安装板,所述安装板上连接有电气柜,所述安装板周向均匀连接有多条机械腿,所述机械腿包括:
7.髋关节,包括第一关节支架和旋转电机,所述旋转电机与所述安装板相连,所述旋转电机驱动所述第一关节支架在平行于所述安装板所在平面旋转;
8.大腿,包括第二关节支架和第二电液作动器,所述第二关节支架与所述第一关节支架转动连接,所述第二电液作动器铰接安装于所述第一关节支架内,所述第二电液作动器的输出端与所述第二关节支架铰接;
9.小腿,包括第三关节支架和第三电液作动器,所述第三关节支架与所述第二关节支架转动连接,所述第三电液作动器铰接安装于所述第二关节支架内,所述第三电液作动器的输出端与所述第三关节支架铰接;
10.脚部,包括脚部安装架、第四电液作动器和固定件,所述脚部安装架与所述第三关节支架转动连接,所述第四电液作动器铰接安装于所述第三关节支架内,所述第四电液作动器的输出端与所述脚部安装架铰接,所述固定件安装于所述脚部安装架上。
11.在本发明的一个实施例中,所述脚部安装架与所述第三关节支架转动连接的位置位于所述脚部安装架的一端,所述第四电液作动器与所述脚部安装架铰接的位置位于所述
脚部安装架的另一端。
12.在本发明的一个实施例中,所述第二电液作动器、第三电液作动器和第四电液作动器分别通过连杆组件与所述第二关节支架、第三关节支架和脚部连接架铰接,所述连杆组件包括连接所述第二电液作动器、第三电液作动器、第四电液作动器和所述第一关节支架、第二关节支架、第三关节支架的第一连杆,以及连接所述第二电液作动器、第三电液作动器、第四电液作动器和所述第二关节支架、第三关节支架、脚部连接架的第二连杆。
13.在本发明的一个实施例中,所述固定件为磁铁,多个所述磁铁通过脚部连接板与所述脚部连接架相连,所述脚部连接板上安装有脚部支持杆,所述脚部支持杆下端面与所述脚部安装板之间的距离大于所述磁铁下端面与所述脚部安装板之间的距离。
14.在本发明的一个实施例中,所述磁铁与所述脚部安装板之间设置有轭铁。
15.在本发明的一个实施例中,所述脚部连接板与脚部连接架通过缓冲组件相连,所述缓冲组件包括缓冲橡胶、活动连接板和活动盖板,所述脚部连接板顶面开设有放置所述缓冲橡胶的安装槽,所述活动连接板的截面为t型,所述活动连接板的平面抵接所述缓冲橡胶,所述活动盖板覆盖所述脚部连接板,所述活动连接板的纵面穿过所述活动盖板与所述脚部连接架相连。
16.在本发明的一个实施例中,所述旋转电机通过连接件安装于所述安装板外周,所述电气柜安装于所述旋转电机输出端对应的所述安装板一侧。
17.在本发明的一个实施例中,所述连接件包括板簧支架和电机连接板,所述板簧支架的截面为工字型,所述安装板和电机连接板上均设置有t形槽,所述板簧支架的两端分别插入所述t形槽内。
18.在本发明的一个实施例中,所述电气柜为异形结构,包括对应所述安装板设置的主体以及插入两所述机械腿之间的支柜。
19.在本发明的一个实施例中,所述第一关节支架、第二关节支架、第三关节支架和脚部安装架相互之间的连接轴上均安装有传感器。
20.本发明的上述技术方案相比现有技术具有以下优点:
21.本发明所述的爬壁机器人结构小巧,自重小,灵活性高。
附图说明
22.为了使本发明的内容更容易被清楚的理解,下面根据本发明的具体实施例并结合附图,对本发明作进一步详细的说明,其中
23.图1是本发明整体结构示意图;
24.图2是本发明的机械腿和脚部实施例一示意图;
25.图3是本发明的机械腿实施例二剖视图;
26.图4是本发明的脚部结构实施例二工作状态一示意图;
27.图5是本发明的脚部结构实施例二工作状态二示意图;
28.图6是本发明的俯视图。
29.说明书附图标记说明:10、安装板;11、电气柜;12、主体;13、支柜;14、板簧支架;15、电机连接板;16、t形槽;
30.20、机械腿;21、传感器;22、第一连杆;23、第二连杆;
31.30、髋关节;31、第一关节支架;32、旋转电机;
32.40、大腿;41、第二关节支架;42、第二电液作动器;
33.50、小腿;51、第三关节支架;52、第三电液作动器;
34.60、脚部;61、脚部安装架;62、第四电液作动器;63、固定件;64、脚部安装板;65、脚部支持杆;66、缓冲橡胶;67、活动连接板;68、活动盖板。
具体实施方式
35.下面结合附图和具体实施例对本发明作进一步说明,以使本领域的技术人员可以更好地理解本发明并能予以实施,但所举实施例不作为对本发明的限定。
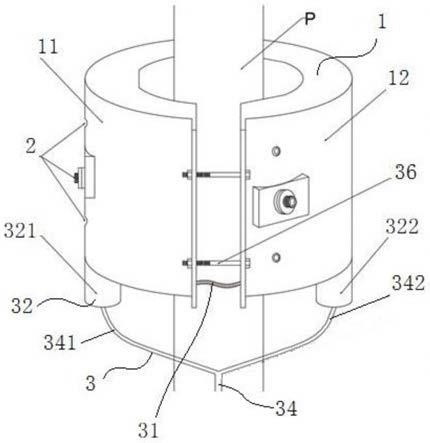
36.参照图1所示,为本发明的一种多足爬壁机器人整体结构示意图。本发明的爬壁机器人包括安装板10,所述安装板10上连接有电气柜11,所述安装板10周向均匀连接有多条机械腿20,所述机械腿20包括:
37.髋关节30,包括第一关节支架31和旋转电机32,所述旋转电机32与所述安装板10相连,所述旋转电机32驱动所述第一关节支架31在平行于所述安装板10所在平面旋转;
38.大腿40,包括第二关节支架41和第二电液作动器42,所述第二关节支架41与所述第一关节支架31转动连接,所述第二电液作动器42铰接安装于所述第一关节支架31内,所述第二电液作动器42的输出端与所述第二关节支架41铰接;
39.小腿50,包括第三关节支架51和第三电液作动器52,所述第三关节支架51与所述第二关节支架41转动连接,所述第三电液作动器52铰接安装于所述第二关节支架41内,所述第三电液作动器52的输出端与所述第三关节支架51铰接;
40.脚部60,包括脚部安装架61、第四电液作动器62和固定件63,所述脚部安装架61与所述第三关节支架51转动连接,所述第四电液作动器62铰接安装于所述第三关节支架51内,所述第四电液作动器62的输出端与所述脚部安装架61铰接,所述固定件63安装于所述脚部安装架61上。
41.本实施例中,机械腿20在安装板10周向均匀分布,一方面保证爬壁机器人支撑的稳定,另一方面,由于机械腿20位于各个方向,因此爬壁机器人可以实现无头模式运动,使得爬壁机器人的运动更加灵活。
42.髋关节30中,通过旋转电机32控制第一关节支架31的旋转,实现爬壁机器人的转向,与无头运动模式配合,提高了爬壁机器人的灵活性。大腿40与髋关节30、小腿50与大腿40、脚部60与小腿50之间均通过第二电液作动器42的驱动实现关节处的转动,达到脚部60位置调整的目的。多条机械腿20的配合实现了爬壁机器人的移动。电液作动器体积小,驱动力大,因此电液作动器可以设置在关节支架内,简化了髋关节30、大腿40、小腿50、脚部60的连接结构,且电液作动器与关节支架相连,提高了机械腿20整体结构的强度,关节支架为中空结构,减轻了关节支架的重量,使得机械腿20的自重减轻。又由于电液作动器无需额外连接液压泵站,因此爬壁机器人的整体自重大大减小,爬壁机器人格外轻便。
43.脚部60中,固定件63用于与竖直表面进行贴合固定,以使爬壁机器人能够沿着竖直表面行走、攀爬。对于不同的竖直表面,可以采用不同的固定件63。但无论固定件63采用何种类型或结构,其要与竖直表面固定通常均需要自身的贴合面与竖直表面基本保持平行。若贴合面与竖直表面有较大的倾斜角度,便会导致很难实现吸附固定。而本实施例中,
髋关节30只能在平行于安装板10所在平面的平面内旋转,不会产生外展,且第一关节支架31、第二关节支架41、第三关节支架51和脚部60连接架之间的连接轴相互平行,因此脚部60与竖直表面之间只会产生垂直于连接轴方向的倾角。当髋关节30、大腿40和小腿50的姿态调整完成,脚部60与竖直表面之间仍存在倾角,则第四电液作动器62可以对脚部60进行调整至与竖直表面贴合固定,从而简化固定件63与竖直表面的固定难度,提高行走效率。
44.同时,在固定件63与竖直面贴合后,固定面与竖直面之间的吸附力很大,若直接拉动固定件63,则很难将脚部60与竖直面分离。第四电液作动器62驱动脚部60相对第三关节支架51转动的形式,使得在抬起脚部60时,脚部60也为旋转动作,脚部60的一端首先抬起,固定件63一端先与竖直面脱离,固定件63在一端脱离后,则其整体就容易与竖直面脱离。
45.在本发明的其他实施例中,关节可以不限于大腿和小腿,具体根据运动需要设置,关节间驱动通过电液作动器实现。
46.作为优选的,为方便控制各关节转动的角度,所述第一关节支架31、第二关节支架41、第三关节支架51和脚部安装架61相互之间的连接轴上均安装有传感器21。
47.参照图2所示,作为本发明的优选实施例,第四电液作动器62驱动脚部60绕其与第三关节支架51的连接轴转动,第三电液作动器52与脚部60连接架的铰接点距离连接轴越近,则第四电液作动器62驱动脚部60转动的力矩越大。为减小第四电液作动器62的驱动力,所述脚部安装架61与所述第三关节支架51转动连接的位置位于所述脚部安装架61的一端,所述第四电液作动器62与所述脚部安装架61铰接的位置位于所述脚部安装架61的另一端。
48.本实施例中,电液作动器与各关节支架直接铰接,脚部安装架61的受力点为与第四电液作动器62的铰接处,脚部安装架61的转动支点为与第三关节支架51的连接轴,根据杠杆原理,距离转动支点越远越省力,当铰接处与连接轴分别位于脚部60连接架的两端时,第四电液作动器62驱动脚部60转动的作用力最小。当脚部60踩向竖直面时,脚部60的一端首先接触竖直面,随着第四电液作动器62的推动,脚部60转动,直至完全贴合竖直面,实现吸附固定。当脚部60离开竖直面时,第四电液作动器62的推杆收回,脚部60与绕连接轴转动的趋势,使得脚部60的一端首先抬起。随着一端抬起,脚部60与竖直面之间的吸附力减弱,脚部60能够快速轻易的脱离竖直面。提高爬壁机器人的移动效率。
49.参照图3所示,作为本发明的优选实施例,电液作动器推动关节支架转动,因此电液作动器本身在动作的过程中存在一定的转动角度,故电液作动器在关节支架内仅有一个铰接安装点,但此时电液作动器的动作幅度较大,容易将关节转动超限。为保证电液作动器位置更稳定,同时限制各部分的转动角度,所述第二电液作动器42、第三电液作动器52和第四电液作动器62分别通过连杆组件与所述第二关节支架41、第三关节支架51和脚部60连接架铰接,所述连杆组件包括连接所述第二电液作动器42、第三电液作动器52、第四电液作动器62和所述第一关节支架31、第二关节支架41、第三关节支架51的第一连杆22,以及连接所述第二电液作动器42、第三电液作动器52、第四电液作动器62和所述第二关节支架41、第三关节支架51、脚部60连接架的第二连杆23。在髋关节30处,第二电液作动器42同时连接第一连杆22和第二连杆23,第一连杆22和第二连杆23还分别连接第一关节支架31和第二关节支架41。第二电液作动器42安装在第一关节支架31内,与第一关节支架31相连的第一连杆22限制了第二电液作动器42的活动范围,从而第二关节支架41的摆动范围被控制。同样的,第三关节支架51和脚部60连接架的摆动范围被控制。
50.参照4和图5所示,以脚部60转动为例。本实施例中,当第四电液作动器62推出,第一连杆22绕与第三关节支架51的连接处向下转动,同时推动第二连杆23一端向下移动,带动第二连杆23另一端上移,与第二连杆23相连的脚部60连接架的一端向上转动,实现脚部60的勾起。当第四电液作动器62收回,第一连杆22绕与第三关节支架51的连接处向上转动,同时带动第二连杆23的一端向上移动,第二连杆23的另一端下移,与第二连杆23相连的脚部60连接架的一端向下转动,实现脚部60的绷起。
51.作为本发明的优选实施例,所述固定件63为磁铁,多个所述磁铁通过脚部60连接板与所述脚部60连接架相连,所述脚部60连接板上安装有脚部支持杆65,所述脚部支持杆65下端面与所述脚部安装板6410之间的距离大于所述磁铁下端面与所述脚部安装板6410之间的距离。
52.本实施例中,由于爬壁机器人通过抬脚实现越障,因此无需将磁铁设置的与墙壁表面有较大间隙,以避让障碍物,磁铁可以尽可能贴近墙壁表面,但磁铁不能贴合墙壁表面,若磁铁贴合墙壁表面,则磁铁与墙壁表面无法分离,因此设置有脚部支持杆65,通过脚部支持杆65使得磁铁与墙壁表面保持较小的间隙。为防止脚部支持杆65与墙壁之间刮蹭,脚部支持杆65端部设置有包胶。由于磁感线密度越大,磁感应强度越大,而越靠近磁铁的位置磁感线密度越大,因此,在磁铁贴近墙壁表面时,磁铁与墙壁之间的吸力很大,使得爬壁机器人能够承受较大的负载。进一步的,为增强磁铁的吸合力,在所述磁铁与所述脚部安装板6410之间设置有轭铁。提高了磁铁的效率。
53.在本发明的其他实施例中,固定件63也可以采用其它相应类型或结构。例如当竖直表面为光滑平整的玻璃或塑料表面时,固定件63可以采用吸盘,利用真空吸附力与竖直表面进行贴合固定。吸盘吸附竖直面时,同样可以通过先使吸盘的一侧抬起,使得吸盘破真空,然后方便整个吸盘与竖直面的脱离。
54.参照图4所示,由于磁铁对墙壁表面有吸力,当将脚部60从墙壁上抬起,磁铁的吸力突然消失,磁铁对脚部60连接架有反作用力,为克服该反作用力,所述脚部60连接板与脚部60连接架通过缓冲组件相连。所述缓冲组件包括缓冲橡胶66、活动连接板67和活动盖板68,所述脚部60连接板顶面开设有放置所述缓冲橡胶66的安装槽,所述活动连接板67的截面为t型,所述活动连接板67的平面抵接所述缓冲橡胶66,所述活动盖板68覆盖所述脚部60连接板,所述活动连接板67的纵面穿过所述活动盖板68与所述脚部60连接架相连。
55.本实施例中,当脚部60从墙壁上抬起,磁铁有向脚部60连接架方向冲击的趋势。该趋势推动磁铁连接板向磁铁连接架的方向挤压,缓冲橡胶66被挤压,抵消冲击力。为方便安装缓冲橡胶66,脚部60连接板上表面开设有安装槽,为将缓冲橡胶66和活动连接板67固定在安装槽内,安装槽通过活动盖板68覆盖。脚部60连接板通过活动连接板67与脚部60连接架相连,活动连接板67插入脚部60连接架中,固定轴穿过脚部60连接架和活动连接板67将两者固定。
56.作为本发明的优选实施例,所述旋转电机32通过连接件安装于所述安装板10外周,所述电气柜11安装于所述旋转电机32输出端对应的所述安装板10一侧。从而安装板10的高度不会超过旋转电机32,且由于旋转电机32具有一定的高度,电气柜11位于旋转电机32输出端所在一侧使得安装板10与电气柜11的总厚度与旋转电机32的高度相当,既不会增加爬壁机器人的高度,也不会占用爬壁机器人下方的空间,影响爬壁机器人的越障高度。爬
壁机器人尺寸更小,更加灵活。为防止安装板10覆盖的范围较小,使得电气柜11过小,无法承载全部电气元件,在本发明的优选实施例中,所述电气柜11设置为异形结构,包括对应所述安装板10设置的主体12以及插入两所述机械腿20之间的支柜13。通过插入两机械腿20之间的支柜13,既增加了电气柜11的体积且不增加其高度,满足尺寸需求,同时又不影响机械腿20的动作。进一步的,参照图6所示,机械腿20在贴靠墙壁以及抬起的过程中均会产生振动,影响机械腿20的使用寿命。因此所述连接件包括板簧支架14和电机连接板15,所述板簧支架14的截面为工字型,所述安装板10和电机连接板15上均设置有t形槽16,所述板簧支架14的两端分别插入所述t形槽16内。板簧支架14具有弹性,能够在机械腿20运动过程中起到缓冲作用,避免各机械腿20运动中的相互干涉。通过设置t形槽16卡接板簧支架14,能够保证板簧支架14连接的稳定。
57.显然,上述实施例仅仅是为清楚地说明所作的举例,并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本发明创造的保护范围之中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。