1.本发明涉及海绵制品切割技术领域,具体为一种海绵切割机切割控制系统。
背景技术:
2.海绵,是一种多孔材料,具有良好的吸水性,能够用于清洁物品。人们常用的海绵由木纤维素纤维或发泡塑料聚合物制成。另外,也有由海绵动物制成的天然海绵,大多数天然海绵用于身体清洁或绘画。另外,还有三类其他材料制成的合成海绵,分别为低密度聚醚(不吸水海绵)、聚乙烯醇(高吸水材料,无明显气孔)和聚酯。而海绵在加工过程中,需要对其进行切割。
3.申请人在申请本发明时,经过检索,发现中国专利公开了一种“海绵切割机切割控制系统”,其申请号为“201810244646.2”,该专利主要通过增加光电开关,通过光电开关感应、反馈,系统自动控制海绵移动到位,再进行自动切割,且能够实现自动连续重复切割,使用方便,省时省力,提高了海绵切割效率,但是在对于海绵的固定方面过于简单,在切割过程中,会造成海绵发生相对位移,影响其切割精度,因此,根据申请人的发明,发明了一种能够适用于不同长度和厚度的海绵,且切割精度高的切割装置,解决了切割精度差的问题。
技术实现要素:
4.(一)解决的技术问题
5.针对现有技术的不足,本发明提供了一种海绵切割机切割控制系统,解决了稳定性差造成精度差的问题。
6.(二)技术方案
7.为实现以上目的,本发明通过以下技术方案予以实现:一种海绵切割机切割控制系统,包括底板和plc控制板,所述底板的上表面两侧均固定连接有立柱,所述立柱的上端侧壁设置有第一驱动机构,所述底板的上表面设置有第二驱动机构,所述第二驱动机构的上表面设置有第三驱动机构,所述第三驱动机构的上表面设置有夹持机构;
8.所述第一驱动机构包括第一固定框,所述第一固定框的左侧内壁设置有第一电机,所述第一电机的输出端固定连接有第一螺纹杆,所述第一螺纹杆的外壁螺纹连接有第一移动块,所述第一移动块的底端固定连接有第一连接块,所述第一连接块的底端固定连接有连接板,所述连接板的底端固定连接有第一电动伸缩杆,所述第一电动伸缩杆的底端设置有切割刀,所述切割刀的外表面一侧设置有第一距离传感器;
9.所述第二驱动机构包括第二固定框,所述第二固定框的内壁设置有第二电机,所述第二电机的输出端固定连接有第二螺纹杆,所述第二螺纹杆的外壁螺纹连接有第二移动块,所述第二移动块的上端固定连接有第二连接块,所述第二连接块的上端固定连接有第三固定框;
10.所述第三驱动机构包括第三固定框,所述第三固定框的外表面固定连接有第三电机,所述第三电机的输出端固定连接有双向丝杆,所述双向丝杆的外壁螺纹连接有第三移
动块,所述第三移动块的上端固定连接有第三连接块,所述第三连接块的上端固定连接有连接架;
11.所述夹持机构包括连接架,所述连接架的上内壁固定连接有第二电动伸缩杆,所述第二电动伸缩杆的底端设置有夹板,所述连接架的中部内壁固定连接有限位板,所述连接架的上表面一侧设置有第二距离传感器,所述连接架的上表面设置有第三距离传感器。
12.优选的,所述底板的底端四角均固定连接有支撑腿。
13.优选的,所述第一固定框的右侧内壁设置有第一轴承,所述第一轴承的内壁与第一螺纹杆固定连接。
14.优选的,所述第二固定框远离第二电机的一侧内壁设置有第二轴承,所述第二轴承的内壁与第二螺纹杆固定连接。
15.优选的,所述第三固定框的左侧内壁设置有第三轴承,所述第三轴承的内壁与双向丝杆固定连接。
16.优选的,所述plc控制板的输入端电性连接有控制软件,所述plc控制板的输出端电性连接有第一电机、第二电机、第三电机、第一电动伸缩杆、第二电动伸缩杆、第一距离传感器和第二距离传感器和第三距离传感器。
17.优选的,一种海绵切割机切割控制系统所涉及的切割方法,包括以下步骤:
18.(1)将海绵的长度和厚度数据输入控制软件中,控制软件将长度数据信息传输给plc控制板,plc控制板控制第三电机和第三距离传感器进行协调工作,使得两个连接架的间距为海绵的长度;
19.(2)将海绵放置于限位板的上表面,控制软件再次将厚度数据信息传输给plc控制板,plc控制板控制第二电动伸缩杆和第二距离传感器进行协调工作,使得夹板下降一定高度,对海绵进行夹持固定;
20.(3)将需要切割的路径输入控制软件中,控制软件将信息传输给plc控制板,plc控制板控制第一电机、第一电动伸缩杆、第一距离传感器和第二电机进行协调工作,完成切割刀的切割工作。
21.(三)有益效果
22.本发明提供了一种海绵切割机切割控制系统。具备以下有益效果:
23.1、通过设置有plc控制板、第三电机和第三距离传感器,plc控制板控制第三电机和第三距离传感器进行协调工作,使得两个连接架的间距为海绵的长度,适用于不同长度的海绵,且实现自动化,定位精度高。
24.2、通过设置有plc控制板、第二电动伸缩杆和第二距离传感器,plc控制板控制第二电动伸缩杆和第二距离传感器进行协调工作,使得夹板下降一定高度,对海绵进行夹持固定,适用于不同厚度的海绵,防止夹持过度,造成海绵的损坏。
25.3、通过设置有plc控制板、第一电机、第一电动伸缩杆、第一距离传感器和第二电机,plc控制板控制第一电机、第一电动伸缩杆、第一距离传感器和第二电机进行协调工作,完成切割刀的切割工作,可进行自动切割,且能够实现自动连续重复切割,使用方便,省时省力,提高了海绵切割效率。
附图说明
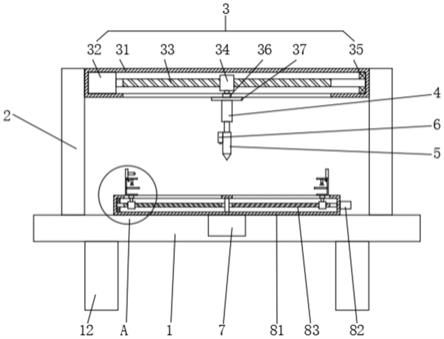
26.图1为本发明的整体结构示意图;
27.图2为图1中a处的结构放大示意图;
28.图3为本发明的侧视示意图;
29.图4为本发明的第二驱动机构侧视示意图;
30.图5为本发明的连接架结构示意图;
31.图6为本发明的控制示意图。
32.其中,1、底板;2、立柱;3、第一驱动机构;31、第一固定框;32、第一电机;33、第一螺纹杆;34、第一移动块;35、第一轴承;36、第一连接块;37、连接板;4、第一电动伸缩杆;5、切割刀;6、第一距离传感器;7、第二驱动机构;71、第二固定框;72、第二电机;73、第二螺纹杆;74、第二移动块;75、第二轴承;76、第二连接块;8、第三驱动机构;81、第三固定框;82、第三电机;83、双向丝杆;84、第三移动块;85、第三连接块;86、第三轴承;9、夹持机构;91、连接架;92、第二电动伸缩杆;93、夹板;94、限位板;10、第二距离传感器;11、第三距离传感器;12、支撑腿;13、plc控制板;14、控制软件。
具体实施方式
33.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
34.实施例一:
35.如图1-6所示,本发明实施例提供一种海绵切割机切割控制系统,包括底板1和plc控制板13,底板1的底端四角均固定连接有支撑腿12,底板1的上表面两侧均固定连接有立柱2,立柱2的上端侧壁设置有第一驱动机构3,底板1的上表面设置有第二驱动机构7,第二驱动机构7的上表面设置有第三驱动机构8,第三驱动机构8的上表面设置有夹持机构9。
36.第一驱动机构3包括第一固定框31,第一固定框31的左侧内壁设置有第一电机32,第一电机32的输出端固定连接有第一螺纹杆33,第一固定框31的右侧内壁设置有第一轴承35,第一轴承35的内壁与第一螺纹杆33固定连接,起到限位固定的作用,第一螺纹杆33的外壁螺纹连接有第一移动块34,第一移动块34的底端固定连接有第一连接块36,第一连接块36的底端固定连接有连接板37,通过第一电机32的驱动作用,可实现连接板37的平移,连接板37的底端固定连接有第一电动伸缩杆4,第一电动伸缩杆4的底端设置有切割刀5,用于海绵的切割工作,切割刀5的外表面一侧设置有第一距离传感器6,对下降高度和切割深度的检测。
37.第二驱动机构7包括第二固定框71,第二固定框71的内壁设置有第二电机72,第二电机72的输出端固定连接有第二螺纹杆73,第二固定框71远离第二电机72的一侧内壁设置有第二轴承75,第二轴承75的内壁与第二螺纹杆73固定连接,起到限位固定的作用,第二螺纹杆73的外壁螺纹连接有第二移动块74,第二移动块74的上端固定连接有第二连接块76,第二连接块76的上端固定连接有第三固定框81,通过第二电机72的驱动作用,可实现第三固定框81的前后平移。
38.第三驱动机构8包括第三固定框81,第三固定框81的外表面固定连接有第三电机82,第三电机82的输出端固定连接有双向丝杆83,第三固定框81的左侧内壁设置有第三轴承86,第三轴承86的内壁与双向丝杆83固定连接,起到限位固定的作用,双向丝杆83的外壁螺纹连接有第三移动块84,第三移动块84的上端固定连接有第三连接块85,第三连接块85的上端固定连接有连接架91,通过第三电机82的驱动作用,可实现两个连接架91的相向移动。
39.夹持机构9包括连接架91,连接架91的上内壁固定连接有第二电动伸缩杆92,第二电动伸缩杆92的底端设置有夹板93,连接架91的中部内壁固定连接有限位板94,夹板93和限位板94实现对海绵的夹持,连接架91的上表面一侧设置有第二距离传感器10,控制夹板93的下降距离,防止夹持过度,造成海绵的损坏,连接架91的上表面设置有第三距离传感器11。
40.plc控制板13的输入端电性连接有控制软件14,用于信息的输入,包括海绵的长度、厚度和切割路径,plc控制板13的输出端电性连接有第一电机32、第二电机72、第三电机82、第一电动伸缩杆4、第二电动伸缩杆92、第一距离传感器6和第二距离传感器10和第三距离传感器11,完成海绵的切割工作。
41.实施例二:一种海绵切割机切割控制系统所涉及的切割方法,包括以下步骤:
42.(1)将海绵的长度和厚度数据输入控制软件14中,控制软件14将长度数据信息传输给plc控制板13,plc控制板13控制第三电机82和第三距离传感器11进行协调工作,使得两个连接架91的间距为海绵的长度。
43.(2)将海绵放置于限位板94的上表面,控制软件14再次将厚度数据信息传输给plc控制板13,plc控制板13控制第二电动伸缩杆92和第二距离传感器10进行协调工作,使得夹板93下降一定高度,对海绵进行夹持固定。
44.(3)将需要切割的路径输入控制软件14中,控制软件14将信息传输给plc控制板13,plc控制板13控制第一电机32、第一电动伸缩杆4、第一距离传感器6和第二电机72进行协调工作,完成切割刀5的切割工作。
45.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。