1.本实用新型涉及钢轨打磨技术领域,尤其涉及的是一种自补偿型的环保钢轨自动打磨装置及系统。
背景技术:
2.现在的轨道交通,如高速铁路、地铁、有轨电车等都是采用技术先进的无缝钢轨,无缝钢轨是通过焊接技术将短钢轨焊接而成长条轨,其中无缝线路95﹪是采用钢轨接触焊(闪光焊)工艺完成的。其原理是利用电流通过钢轨接触面产生热量熔化钢轨局部端面,再经顶锻完成焊接。
3.焊接过程中的电流是由专用焊轨机通过电极传导到钢轨,为保证焊接过程的电流传导稳定和无功损耗,焊接前需要对钢轨导电面进行打磨除锈,以保证接触良好。钢轨制造厂的钢轨焊接试验和钢轨厂内焊接均采用同样的焊接工艺,钢轨自动焊接前轨腰需要人员打磨除锈。
4.现有技术中,目前钢轨打磨主要方式有2种:一是人工手持手动打磨机一点点地进行,另一种是半自动打磨机,由人工操作来回推拉打磨。无论是人工打磨还是半自动打磨机,均是由人工全程操作,靠操作人员来控制打磨位置和打磨量,且在打磨的过程中砂轮会磨损,都容易造成打磨量不准确的问题。
5.因此,现有技术还有待于改进和发展。
技术实现要素:
6.本实用新型要解决的技术问题在于,针对现有技术的上述缺陷,提供一种自补偿型的环保钢轨自动打磨装置及系统,旨在解决现有技术中钢轨的打磨量不准确的问题。
7.本实用新型解决技术问题所采用的技术方案如下:
8.一种自补偿型的环保钢轨自动打磨装置,其中,其包括:
9.底座;
10.打磨器,与所述底座滑动连接并用于打磨钢轨;
11.驱动件,设置于所述底座,并用于驱动所述打磨器在所述底座上滑动;
12.传感组件,与所述打磨器连接且与所述驱动件的输出轴连接;
13.其中,所述传感组件用于检测所述打磨器接触所述钢轨。
14.所述的自补偿型的环保钢轨自动打磨装置,其中,所述传感组件包括:
15.螺杆,与所述驱动件的输出轴连接;
16.螺母,与所述螺杆螺纹连接;
17.弹性件,设置于所述螺母;
18.螺母座,与所述弹性件连接,且与所述打磨器连接;
19.位移传感器,设置于所述螺母座,所述位移传感器用于检测所述螺母相对于螺母座的位移。
20.所述的自补偿型的环保钢轨自动打磨装置,其中,所述螺母座上设置有通孔;
21.所述螺母包括:
22.基部,与所述弹性件连接;
23.套筒部,设置于所述基部,与所述螺杆螺纹连接;
24.其中,所述套筒部插入所述通孔。
25.所述的自补偿型的环保钢轨自动打磨装置,其中,所述弹性件为弹簧;
26.所述螺母座上设置有凹槽;
27.所述螺母还包括:
28.杆部,设置于所述基部;
29.其中,所述弹簧套设在所述杆部外,所述杆部插入所述凹槽。
30.所述的自补偿型的环保钢轨自动打磨装置,其中,所述打磨器包括:轨腰打磨器;
31.所述驱动件包括:轨腰驱动件;
32.所述传感组件包括:轨腰传感组件;
33.所述底座包括:
34.承载座,用于放置所述钢轨;
35.基座,与所述承载座连接;
36.y轴滑轨,设置于所述基座;
37.y轴滑块,与所述y轴滑轨滑动连接;
38.其中,所述轨腰打磨器设置于所述y轴滑块,所述轨腰驱动件设置于所述基座,所述轨腰传感组件的螺母座通过所述y轴滑块与所述轨腰打磨器连接。
39.所述的自补偿型的环保钢轨自动打磨装置,其中,所述基座上设置有钢轨阻挡定位器;和/或
40.所述承载座上设置有粉尘收集槽;和/或
41.所述承载座上设置有钢轨锁紧机构,用于固定钢轨;和/或
42.所述轨腰打磨器有两个,两个轨腰打磨器分别位于所述轨道的两侧。
43.所述的自补偿型的环保钢轨自动打磨装置,其中,所述打磨器包括:端面打磨器;
44.所述驱动件包括:端面驱动件;
45.所述传感组件包括:端面传感组件;
46.所述底座还包括:
47.x轴滑轨,设置于所述承载座,与所述基座滑动连接;
48.其中,所述端面打磨器与所述基座连接,所述端面驱动件设置于所述承载座,所述端面传感组件的螺母座通过所述基座与所述端面打磨器连接。
49.所述的自补偿型的环保钢轨自动打磨装置,其中,所述端面打磨器采用碗形砂轮;
50.所述底座还包括:
51.z轴滑轨,设置于所述基座;
52.z轴滑块,与所述z轴滑轨滑动连接;
53.z轴驱动件,与所述z轴滑块连接,并驱动所述z轴滑块在所述z轴滑轨上移动;
54.其中,所述端面打磨器与所述z轴滑块连接。
55.所述的自补偿型的环保钢轨自动打磨装置,其中,所述底座上设置有门体,所述门
体设置在所述底座四周的边缘。
56.一种自补偿型的环保钢轨自动打磨系统,其中,其包括如上述任一项所述的自补偿型的环保钢轨自动打磨装置。
57.有益效果:打磨器与底座滑动连接,当打磨器滑动至钢轨时,传感器可以检测到打磨器已接触钢轨,确定打磨器对钢轨打磨的起始位置,便于控制打磨器对钢轨的打磨量,提高打磨量的准确性。
附图说明
58.图1是本实用新型中自补偿型的环保钢轨自动打磨装置的立体图。
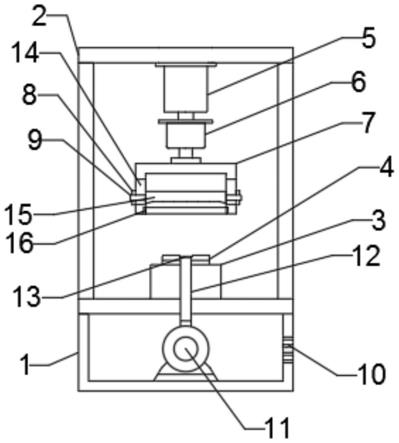
59.图2是本实用新型中自补偿型的环保钢轨自动打磨装置的剖视图。
60.图3是本实用新型中自补偿型的环保钢轨自动打磨装置的侧视图。
61.图4是本实用新型中自补偿型的环保钢轨自动打磨装置的第一结构示意图。
62.图5是图4中a处的放大图。
63.图6是本实用新型中自补偿型的环保钢轨自动打磨装置的第二结构示意图。
64.图7是图6中b处的放大图。
65.图8是图6中c处的放大图。
66.图9是本实用新型中自补偿型的环保钢轨自动打磨装置的第三结构示意图。
67.图10是本实用新型中钢轨锁紧机构的结构示意图。
68.附图标记说明:
69.10、底座;11、承载座;111、粉尘收集槽;112、钢轨锁紧机构;12、基座;121、钢轨阻挡定位器;122、y轴滑轨;123、y轴滑块;124、z轴滑轨;125、z轴滑块;126、z轴驱动件;13、x轴滑轨;14、门体;20、打磨器;21、轨腰打磨器;22、端面打磨器;30、驱动件;31、轨腰驱动件;32、端面驱动件;40、传感组件;41、螺杆;42、螺母;421、基部;422、套筒部;423、杆部;43、弹性件;44、螺母座;441、通孔;45、位移传感器;40a、轨腰传感组件;40b、端面传感组件;50、钢轨。
具体实施方式
70.为使本实用新型的目的、技术方案及优点更加清楚、明确,以下参照附图并举实施例对本实用新型进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
71.请同时参阅图1-图10,本实用新型提供了一种自补偿型的环保钢轨自动打磨装置的一些较佳实施例。
72.现有技术中,采用人工打磨钢轨或者采用半自动打磨钢轨,在打磨过程中主要靠操作人员来控制打磨位置和打磨量,除了打磨量的准确性不高之外,由于打磨过程中人工作业强度大,效率低,粉尘和噪音污染严重。由于本专利的自补偿型的环保钢轨自动打磨装置可以精确控制打磨量,避免人工参与时噪音和粉尘对操作人员的损害,因此,本专利的打磨装置具有环保的特点。
73.如图4、图6以及图7所示,自补偿型的环保钢轨自动打磨装置包括:
74.底座10;
75.打磨器20,与所述底座10滑动连接并用于打磨钢轨50;
76.驱动件30,设置于所述底座10,并用于驱动所述打磨器20在所述底座10上滑动;
77.传感组件40,与所述打磨器20连接且与所述驱动件30的输出轴连接;
78.其中,所述传感组件40用于检测所述打磨器20接触所述钢轨50。
79.打磨器20是指对钢轨50进行打磨的器件,例如,打磨器20包括:电机,砂轮,砂轮与电机的输出轴连接,通过电机驱动砂轮转动,对钢轨50进行打磨。驱动件30是指驱动打磨器20在底座10上滑动的器件,例如,驱动件30可以采用电机。传感组件40是指感应打磨器20接触钢轨50的器件,传感组件40两端分别连接驱动件30的输出轴、打磨器20。钢轨50为工字型钢轨50,通常钢轨50的端面和轨腰需要进行打磨,当然可以根据需要打磨钢轨50的端面和/或轨腰。
80.值得说明的是,打磨器20与底座10滑动连接,当打磨器20滑动至钢轨50时,传感器可以检测到打磨器20已接触钢轨50,确定打磨器20对钢轨50打磨的起始位置,便于控制打磨器20对钢轨50的打磨量,提高打磨量的准确性。
81.可以理解的是,相比于人工控制打磨量,本实用新型采用传感组件40检测打磨器20接触钢轨50,更准确。且传感组件40不受打磨器20的磨损的影响,进一步提高打磨量的准确性。
82.在本实用新型的一个较佳实施例中,请参阅图7,所述传感组件40包括:
83.螺杆41,与所述驱动件30的输出轴连接;
84.螺母42,与所述螺杆41螺纹连接;
85.弹性件43,设置于所述螺母42;
86.螺母42座,与所述弹性件43连接,且与所述打磨器20连接;
87.位移传感器45,设置于所述螺母42座,所述位移传感器45用于检测所述螺母42相对于螺母42座的位移。
88.具体地,驱动件30的输出轴转动时,带动螺杆41转动,则螺母42会沿螺杆41的长度方向移动。通过螺杆41和螺母42将驱动件30的输出轴的转动转化为移动,由于螺母42和打磨器20通过弹性件43和螺母42座连接,螺母42在移动过程中也会带动打磨器20移动,此时,由于弹性件43的形变量不大,螺母42和螺母42座的间距位于预设间距范围内,位移传感器45检测到螺母42相对于螺母42座的位移在一预设位移范围内。当打磨器20接触钢轨50时,打磨器20受到钢轨50的阻碍不会继续移动,螺母42座也不会继续移动,而螺母42并不会受阻碍,会继续移动,并使得弹性件43变形,此时,弹性件43的形变量较大,螺母42和螺母42座之间的间距会超出预设间距范围,位移传感器45检测到螺母42相对于螺母42座的位移也超出预设位移范围,因此,可以通过位移传感器45检测螺母42相对于螺母42座的位移,确定打磨器20是否接触钢轨50。位移传感器45检测的位移量位于预设位移范围内时,打磨器20没有接触钢轨50,位移传感器45检测的位移量位于预设位移范围外时,打磨器20接触钢轨50。
89.需要说明的是,打磨器20接触钢轨50后,螺母42与螺母42座之间的间距可以是缩小(则弹性件43发生压缩变形),也可以是增大(则弹性件43发生拉伸变形)。不论是缩小还是增大,都可能超出预设间距范围。螺母42座位于螺母42和钢轨50之间时,打磨器20接触钢轨50后,打磨器20和螺母42座不再移动,则螺母42会继续移动,并压缩弹性件43,使得弹性件43缩小,则被位移传感器45检测到螺母42相对于螺母42座的位移量超出预设位移方位
(此时,螺母42与螺母42座之间的间距缩小而超出预设间距范围)。螺母42位于螺母42座和钢轨50之间时,打磨器20接触钢轨50后,打磨器20和螺母42座不再移动,则螺母42会继续移动,并拉伸弹性件43,使得弹性件43拉伸,则被位移传感器45检测到螺母42相对于螺母42座的位移量超出预设位移范围(此时,螺母42与螺母42座之间的间距增大而超出预设间距范围)。
90.在本实用新型的一个较佳实施例中,请参阅图7,所述螺母42座上设置有通孔441;
91.所述螺母42包括:
92.基部421,与所述弹性件43连接;
93.套筒部422,设置于所述基部421,与所述螺杆41螺纹连接;
94.其中,所述套筒部422插入所述通孔441。
95.具体地,由于螺母42和螺母42座之间采用弹性件43连接,弹性件43的变形方向有多个,为了避免螺母42和螺母42座之间移动不稳定,螺母42中的套筒部422插入通孔441中,则由于通孔441限制了套筒部422的移动范围,提高螺母42移动的稳定性。
96.在本实用新型的一个较佳实施例中,请参阅图7,所述弹性件43为弹簧;
97.所述螺母42座上设置有凹槽;
98.所述螺母42还包括:
99.杆部423,设置于所述基部421;
100.其中,所述弹簧套设在所述杆部423外,所述杆部423插入所述凹槽。
101.具体地,为了进一步提高螺母42移动的方向,在设置套筒部422的基础上,设置杆部423,并将弹簧套设在杆部423外,由于套筒部422插入通孔441,杆部423插入凹槽,则套筒部422无法在通孔441内转动,杆部423也无法在凹槽内转动,螺母42移动的稳定性更高。
102.在本实用新型的一个较佳实施例中,请同时参阅图4、图5、图6以及图9,所述打磨器20包括:轨腰打磨器21;
103.所述驱动件30包括:轨腰驱动件31;
104.所述传感组件40包括:轨腰传感组件40a;
105.所述底座10包括:
106.承载座11,用于放置所述钢轨50;
107.基座12,与所述承载座11连接;
108.y轴滑轨122,设置于所述基座12;
109.y轴滑块123,与所述y轴滑轨122滑动连接;
110.其中,所述轨腰打磨器21设置于所述y轴滑块123,所述轨腰驱动件31设置于所述基座12,所述轨腰传感组件40a的螺母42座通过所述y轴滑块123与所述轨腰打磨器21连接。
111.具体地,由于钢轨50的轨腰和端面都可以进行打磨,为了对钢轨50的轨腰进行打磨,采用轨腰打磨器21对轨腰进行打磨,相应的,采用轨腰驱动件31对轨腰打磨器21进行驱动,轨腰驱动件31通过轨腰传感组件40a与轨腰打磨器21连接,从而实现检测轨腰打磨器21接触钢轨50的轨腰。
112.如图4、图5以及图10所示,承载座11可放置钢轨50,当然承载座11上可以设置钢轨锁紧机构112,通过钢轨锁紧机构112固定钢轨50。例如,钢轨锁紧机构112包括:锁紧气缸,设置于承载座11;压板,设置于锁紧气缸。锁紧气缸有至少两个,分别位于钢轨50的两侧,每
个锁紧气缸连接一压板,通过压板将钢轨50的轨底向承载座11的方向下压,对钢轨50的轨底进行限位,从而实现钢轨50的固定。为了进一步提高固定效果,钢轨锁紧机构112还包括:侧向推齐气缸,设置于承载座11;推板,设置于侧向推齐气缸,通过推板从轨底的侧面推动轨底,对钢轨50进行侧向限位,防止钢轨50侧向移动,提高钢轨50的固定效果。
113.承载座11上设置钢轨输送机构,钢轨输送机构采用若干个动力滚筒,将钢轨50放在动力滚筒上,通过动力滚筒的滚动输送钢轨50。
114.基座12与承载座11连接,例如,基座12可以与承载座11滑动连接。以钢轨50的长度方向为x轴,以钢轨50的宽度方向为y轴方向,以轨腰的方向为z轴方向。y轴滑块123沿y轴滑轨122滑动,从而带动轨腰打磨器21在钢轨50的宽度方向上移动,实现对轨腰的打磨。
115.通过轨腰驱动件31驱动y轴滑块123沿y轴滑轨122滑动,当轨腰打磨器21接触到钢轨50的轨腰时,轨腰传感组件40a中,位移传感器45检测到螺母42相对于螺母42座的位移,从而确定轨腰打磨器21接触钢轨50的轨腰。
116.在本实用新型的一个较佳实施例中,请同时参阅图4、图5以及图9,所述基座12上设置有钢轨50阻挡定位器121。
117.具体地,为了对承载座11上的钢轨50进行定位,采用钢轨50阻挡定位器121对钢轨50进行定位,以便打磨器20对钢轨50进行打磨。例如,钢轨50阻挡定位器121包括:定位阻挡气缸,设置于基座12;定位阻挡杆,设置于定位阻挡气缸,将钢轨50放置在承载座11上时,将钢轨50的端面推至定位阻挡杆处,由于受到定位阻挡杆的阻挡,无法继续推进钢轨50,则可以通过钢轨锁紧机构112固定钢轨50,实现钢轨50的定位。需要说明的是,在对钢轨50的端面进行打磨时,可以启动定位阻挡气缸收回定位阻挡杆,以便定位阻挡杆干涉钢轨50的端面的打磨。
118.在本实用新型的一个较佳实施例中,请同时参阅图4、图5以及图9,所述轨腰打磨器21有两个,两个轨腰打磨器21分别位于所述轨道的两侧。
119.具体地,通常对轨腰的两侧都要进行打磨,为了提高打磨效率,采用两个轨腰打磨器21同时进行轨腰的打磨,此外,同时从两侧进行轨腰打磨时,可以避免打磨形成的推力推动钢轨50,造成打磨量不准确。
120.在本实用新型的一个较佳实施例中,请同时参阅图3、图4以及图6,所述承载座11上设置有粉尘收集槽111。
121.具体地,在承载座11的底部形成粉尘收集槽111,收集打磨过程中产生的粉尘,粉尘收集槽111设置有开口,以便粉尘通过开口排出。
122.在本实用新型的一个较佳实施例中,请同时参阅图4、图5以及图6,所述打磨器20包括:端面打磨器22;
123.所述驱动件30包括:端面驱动件32;
124.所述传感组件40包括:端面传感组件40b;
125.所述底座10还包括:
126.x轴滑轨13,设置于所述承载座11,与所述基座12滑动连接;
127.其中,所述端面打磨器22与所述基座12连接,所述端面驱动件32设置于所述承载座11,所述端面传感组件40b的螺母42座通过所述基座12与所述端面打磨器22连接。
128.具体地,通过端面驱动件32驱动基座12沿x轴滑轨13滑动,当端面打磨器22接触到
钢轨50的端面时,端面传感组件40b中,位移传感器45检测到螺母42相对于螺母42座的位移,从而确定端面打磨器22接触钢轨50的端面。
129.在本实用新型的一个较佳实施例中,请同时参阅图4、图5以及图6,所述端面打磨器22采用碗形砂轮;
130.所述底座10还包括:
131.z轴滑轨124,设置于所述基座12;
132.z轴滑块125,与所述z轴滑轨124滑动连接;
133.z轴驱动件126,与所述z轴滑块125连接,并驱动所述z轴滑块125在所述z轴滑轨124上移动;
134.其中,所述端面打磨器22与所述z轴滑块125连接。
135.具体地,为了方便调整端面打磨器22在z轴方向上的位置(即高度),通过z轴驱动件126驱动z轴滑块125在z轴滑轨124上移动,实现对端面打磨器22在z轴方向上的位置进行调整。端面打磨器22采用碗形砂轮,可以通过碗形砂轮的边缘对钢轨50的端面进行打磨。
136.在本实用新型的一个较佳实施例中,请同时参阅图1-图3,所述底座10上设置有门体14,所述门体14设置在所述底座10四周的边缘。
137.具体地,为了防止打磨产生的粉尘四处飞扬,采用门体14将打磨装置内的各部件罩起来,防止粉尘四散。例如,在承载座11上还可以设置粉尘处理装置吸收过滤空气中的粉尘。在门体14上设置控制装置控制打磨装置进行打磨,可以采用plc和触摸屏作为主控,进行打磨参数的设置。门体14上还可以设置观察窗,以便观察打磨情况。门体14上设置有入口,钢轨输送机构从入口延伸至门体14外,通过在门体14外的钢轨输送机构上放置钢轨50,并通过钢轨输送机构将钢轨50输送至门体14内,并到达打磨位置。入口处可以设置安全光栅,通过安全光栅检测入口是否有异物,造成安全问题或者卡死损坏问题。
138.本实用新型还提供了自补偿型的环保钢轨自动打磨系统,包括上述任一实施例中所述的所述的自补偿型的环保钢轨自动打磨装置,具体如上所述。
139.本实用新型提供的自补偿型的环保钢轨自动打磨系统,因设置有上述任一技术方案中所述的所述的自补偿型的环保钢轨自动打磨装置,从而具有以上全部有益效果,在此不再赘述。
140.应当理解的是,本实用新型的应用不限于上述的举例,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,所有这些改进和变换都应属于本实用新型所附权利要求的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。