城轨列车及其制动力管理方法与系统、ebcu
技术领域
1.本发明属于车辆制动技术领域,尤其涉及一种城轨列车及其制动力管理方法与系统。
背景技术:
2.目前,城轨车辆制动力管理主要有两种方式:一是由tcms(train control and management system,列车控制和管理系统)进行制动力管理,另一种是由ebcu(electricbrakecontrolunit,电子制动控制单元)进行制动力管理,这两种管理方式各有优缺点:
3.(1)tcms进行制动力管理
4.相较于ebcu的制动力管理,tcms的制动力管理由于省去“电制动申请”环节,其网络延时更短,因此,有利于缩短制动响应时间,提升列车制动系统性能。然而,tcms的安全等级不如关乎列车运行安全的ebcu的安全等级,tcms的安全等级一般为sil0,最高sil2,而ebcu可达sil4,因此,tcms的制动力管理在具有缩短制动响应时间的优势的同时也存在安全等级不高的缺陷。
5.(2)ebcu进行制动力管理
6.正如以上所述,ebcu由于关乎列车运行安全而安全等级较高,由其进行制动力管理的安全等级要优于tcms的制动力管理。然而,ebcu进行制动力管理由于需进行电制动申请,而后牵引控制单元(dcu)再反馈实际施加的电制动力值,流程反复造成网络延时较长,影响制动系统性能。因此,ebcu的制动力管理在具有安全等级较高的优势的同时也存在网络延时较长、制动响应时间长等缺陷。
7.不管是tcms进行制动力管理,还是ebcu进行制动力管理,控制逻辑过于单一,均存在不足。
技术实现要素:
8.本发明的目的在于提供一种城轨列车及其制动力管理方法与系统、ebcu,既能缩短制动响应时间,又能保证制动安全等级,避免列车总制动力不受损失。
9.本发明是通过如下的技术方案来解决上述技术问题的:一种城轨列车制动力管理方法,包括以下步骤:
10.步骤1:tcms获取制动指令以及制动级位,并将所述制动级位发送给ebcu;
11.步骤2:ebcu接收到所述制动级位以及自身检测到的载荷信号,并将所述载荷信号发送给tcms;
12.步骤3:tcms和ebcu均根据所述制动级位和载荷信号计算总制动力,具体计算公式为:
13.f
t
=m
×
a1,fe=m
×
a214.其中,f
t
为tcms计算的总制动力,a1为tcms计算的等效减速度,fe为ebcu计算的总
制动力,a2为ebcu计算的等效减速度,a为目标加速度,a2>a1>a,m为列车重量;
15.步骤4:判断列车处于电空混合制动模式还是纯空气制动模式,同时判断δf是否小于等于设定阈值,其中
16.如果处于电空混合制动模式且δf小于等于设定阈值,则转入步骤5;如果处于电空混合制动模式且δf大于设定阈值,或处于纯空气制动模式,则转入步骤6;
17.步骤5:以tcms计算的总制动力f
t
为依据进行制动控制;
18.步骤6:以ebcu计算的总制动力fe为依据进行制动控制。
19.本发明对差值δf与设定阈值进行比较来确定以何种方式进行制动力管理,当差值小于等于设定阈值时,以tcms计算的总制动力为准,此时制动延时短,差值小对整列车的影响可忽略,表明列车是安全的,因此既缩短了制动响应时间,提升了列车制动系统性能,又保证了制动安全等级;当差值大于设定阈值或纯空气制动模式(即故障制动模式)时,以ebcu计算的总制动力为准,虽然制动延时长,但列车安全性得到了保障;该方法无论以哪个总制动力为准,安全性始终得到保障,且大多数情况下有利于缩短制动延时时间,优于任何一种单一控制逻辑;差值δf的计算和判断均是在电制动计算和发挥的过程中进行的,不额外增加时间,对制动响应时间没有影响。
20.进一步地,所述步骤3中,等效减速度a1、a2的计算公式分别为:
[0021][0022]
其中,v为列车速度,t1为tcms的固有响应延时,t2为ebcu的固有响应延时。
[0023]
进一步地,所述步骤4中,如果ebcu接收到列车各dcu(牵引控制单元)发出的电制动可用信号,则处于电空混合制动模式,如果ebcu接收到列车任意一个dcu(牵引控制单元)发出的电制动不可用信号,则处于纯空气制动模式。
[0024]
进一步地,所述设定阈值的取值范围为5%~20%。
[0025]
进一步地,所述设定阈值的取值范围为10%~15%。
[0026]
本发明还提供一种城轨列车制动力管理系统,包括tcms和ebcu;
[0027]
所述tcms,用于获取制动指令以及制动级位,并将所述制动级位发送给ebcu;根据所述制动级位和载荷信号计算总制动力f
t
,其中f
t
=m
×
a1,a1为tcms计算的等效减速度,a2为ebcu计算的等效减速度,a为目标加速度,a2>a1>a,m为列车重量;将总制动力f
t
发送给ebcu;
[0028]
所述ebcu,用于接收到所述制动级位以及自身检测到的载荷信号,并将所述载荷信号发送给tcms;根据所述制动级位和载荷信号计算总制动力fe,其中fe=m
×
a2;判断列车处于电空混合制动模式还是纯空气制动模式,以及判断δf是否小于等于设定阈值,其中当处于电空混合制动模式且δf大于设定阈值,或处于纯空气制动模式时,根据ebcu计算的总制动力fe进行制动控制;当处于电空混合制动模式且δf小于等于设定阈值时,根据tcms计算的总制动力f
t
进行制动控制。
[0029]
本发明还提供一种ebcu,所述ebcu应用于城轨列车,所述城轨列车还包括tcms,所
述tcms与所述ebcu通信连接;
[0030]
所述ebcu用于获取载荷信号以及tcms发送的制动级位,并将所述载荷信号发送给tcms;
[0031]
所述ebcu用于根据所述制动级位和载荷信号计算总制动力fe,其中fe=m
×
a2,a2为ebcu计算的等效减速度,m为列车重量;
[0032]
所述ebcu用于接收tcms发送的总制动力f
t
,并判断列车处于电空混合制动模式还是纯空气制动模式,以及判断δf是否小于等于设定阈值,其中f
t
=m
×
a1,a1为tcms计算的等效减速度,a为目标加速度,a2>a1>a;
[0033]
当处于电空混合制动模式且δf大于设定阈值,或处于纯空气制动模式时,根据ebcu计算的总制动力fe进行制动控制;当处于电空混合制动模式且δf小于等于设定阈值时,根据tcms计算的总制动力f
t
进行制动控制。
[0034]
本发明还提供一种城轨列车,包括如上所述的制动力管理系统。
[0035]
有益效果
[0036]
与现有技术相比,本发明的优点在于:
[0037]
本发明所提供的一种城轨列车及其制动力管理方法与系统,对差值δf与设定阈值进行比较来确定以何种方式进行制动力管理,当差值小于等于设定阈值时,以tcms计算的总制动力为准,此时制动延时短,差值小对整列车的影响可忽略,表明列车是安全的,因此既缩短了制动响应时间,提升了列车制动系统性能,又保证了制动安全等级;当差值大于设定阈值或纯空气制动模式时,以ebcu计算的总制动力为准,虽然制动延时长,但列车安全性得到了保障;该方法无论以哪个总制动力为准,安全性始终得到保障,且大多数情况下有利于缩短制动延时时间,优于任何一种单一控制逻辑;差值δf的计算和判断均是在电制动计算和发挥的过程中进行的,不额外增加时间,对制动响应时间没有影响。
附图说明
[0038]
为了更清楚地说明本发明的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一个实施例,对于本领域普通技术人员来说,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0039]
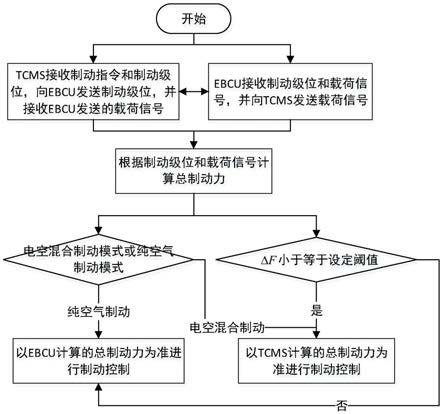
图1是本发明实施例中城轨列车制动力管理方法流程图。
具体实施方式
[0040]
下面结合本发明实施例中的附图,对本发明中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0041]
下面以具体地实施例对本技术的技术方案进行详细说明。下面这几个具体的实施例可以相互结合,对于相同或相似的概念或过程可能在某些实施例不再赘述。
[0042]
如图1所示,本实施例所提供的一种城轨列车制动力管理方法,包括以下步骤:
[0043]
步骤1:tcms获取制动指令以及制动级位,并将制动级位发送给ebcu。
[0044]
步骤2:ebcu接收到制动级位以及自身检测到的载荷信号,并将载荷信号发送给tcms。
[0045]
步骤3:tcms和ebcu均根据制动级位和载荷信号计算总制动力。
[0046]
根据制动级位,tcms和ebcu确定的目标减速度a是相同的,但是tcms和ebcu均存在固有的响应延时,且ebcu固有的响应延时长于tcms固有的响应延时,为了确保满足目标减速度需求,消除固有响应延时的影响,tcms和ebcu均根据各自固有响应延时对目标减速度a进行微调,因此tcms和ebcu计算总制动力的具体公式分别为:
[0047]ft
=m
×
a1(1)
[0048]
fe=m
×
a2(2)
[0049]
其中,f
t
为tcms计算的总制动力,a1为tcms根据自身固有响应延时对目标减速度微调后的等效减速度,fe为ebcu计算的总制动力,a2为ebcu根据自身固有响应延时对目标减速度微调后的等效减速度,a2>a1>a,m为列车重量。例如某次制动的目标减速度a=1.0m/s2,微调后,a1=1.06m/s2,a2=1.1m/s2。
[0050]
本实施例中,等效减速度a1、a2与目标减速度a的换算公式为:
[0051][0052][0053]
其中,v为列车速度,t1为tcms的固有响应延时,t2为ebcu的固有响应延时,固有响应延时在设计时有理论值,在列车试验阶段可以测出实际值。
[0054]
步骤4:判断列车处于电空混合制动模式还是纯空气制动模式,同时判断δf是否小于等于设定阈值;
[0055]
如果处于电空混合制动模式且δf小于等于设定阈值,则转入步骤5;如果处于电空混合制动模式且δf大于设定阈值,或处于纯空气制动模式,则转入步骤6。
[0056]
本实施例根据各dcu发出的电制动可用信号来判断列车处于电空混合制动模式还是纯空气制动模式,当ebcu接收到列车各dcu发出的电制动可用信号(即ed_ok置1),列车处于电空混合制动模式;当ebcu接收到列车任意一个dcu发出的电制动不可用信号时,列车处于纯空气制动模式,即故障模式,在故障模式下以保障安全性为准。
[0057]
本实施例中,δf的计算公式为:
[0058][0059]
设定阈值的取值根据具体需求来设定,设定阈值取值越大,更倾向于发挥由tcms进行制动力管理来缩短制动响应延时的优势,设定阈值取值越小,更倾向于考虑列车安全性,确保列车总制动力不损失。本实施例中,设定阈值的取值范围为5%~20%,优选10%~15%。
[0060]
步骤5:以tcms计算的总制动力f
t
为依据进行制动控制。
[0061]
在电空混合制动模式下,且差值δf小于等于设定阈值时,以tcms计算的总制动力f
t
为准,此时制动延时短,差值小对整列车的影响可忽略,表明列车是安全的,因此既缩短
了制动响应时间,提升了列车制动系统性能,又保证了制动安全等级。
[0062]
步骤6:以ebcu计算的总制动力fe为依据进行制动控制。
[0063]
当电制动不正常,即ebcu接收到列车任意一个dcu发出的电制动不可用信号(即ed_ok置0)时,判断当前处于非正常的纯空气制动模式,考虑到纯空气制动模式为故障模式,总制动力以安全性更高的ebcu计算为准。
[0064]
或者,在电空混合制动模式下,且差值δf大于设定阈值时,对整列车的安全性具有影响,此时以安全性更高的ebcu计算的总制动力为准,虽然制动延时长,但列车安全性得到了保障。
[0065]
本发明所述方法的制动力管理由tcms和ebcu共同实施,两者同时计算列车需要的总制动力。根据不同的制动模式进行主辅设置,在电控混合制动模式下,以tcms计算为准,在纯空气制动模式下,以ebcu计算为准;根据差值与设定阈值的比较进行主辅设置,差值小于等于设定阈值时,以tcms计算为准,差值大于设定阈值时,以ebcu计算为准。无论以哪个系统计算的总制动力为准,安全性始终得到保障,且大多数情况下有利于缩短制动延时时间,优于tcms或ebcu单一控制逻辑;差值δf的计算和判断均是在电制动计算和发挥的过程中进行的,不额外增加时间,对制动响应时间没有影响。
[0066]
本实施例还提供一种城轨列车制动力管理系统,包括tcms和ebcu。
[0067]
所述tcms,用于获取制动指令以及制动级位,并将所述制动级位发送给ebcu;根据所述制动级位和载荷信号计算总制动力f
t
(如式(1)和(3)所示),将总制动力f
t
发送给ebcu。
[0068]
所述ebcu,用于接收到所述制动级位以及自身检测到的载荷信号,并将所述载荷信号发送给tcms;根据所述制动级位和载荷信号计算总制动力fe(如式(2)和(4)所示);判断列车处于电空混合制动模式还是纯空气制动模式;判断δf是否小于等于设定阈值,其中当处于电空混合制动模式且δf大于设定阈值,或处于纯空气制动模式时,根据ebcu计算的总制动力fe进行制动控制;当处于电空混合制动模式且δf小于等于设定阈值时,根据tcms计算的总制动力f
t
进行制动控制。
[0069]
本实施例还提供一种ebcu,所述ebcu应用于城轨列车,所述城轨列车还包括tcms,所述tcms与所述ebcu通信连接。
[0070]
所述ebcu用于获取载荷信号以及tcms发送的制动级位,并将所述载荷信号发送给tcms;
[0071]
所述ebcu用于根据所述制动级位和载荷信号计算总制动力fe(如式(2)和(4)所示);
[0072]
所述ebcu用于接收tcms发送的总制动力f
t
(如式(1)和(3)所示),并判断列车处于电空混合制动模式还是纯空气制动模式,以及判断δf(如式(5)所示)是否小于等于设定阈值;
[0073]
当处于电空混合制动模式且δf大于设定阈值,或处于纯空气制动模式时,根据ebcu计算的总制动力fe进行制动控制;当处于电空混合制动模式且δf小于等于设定阈值时,根据tcms计算的总制动力f
t
进行制动控制。
[0074]
本发明所述城轨列车制动力管理系统、ebcu的工作过程可参考如上所述的一种城轨列车制动力管理系统的具体记载,此处不再赘述。
[0075]
以上所揭露的仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或变型,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。