技术特征:
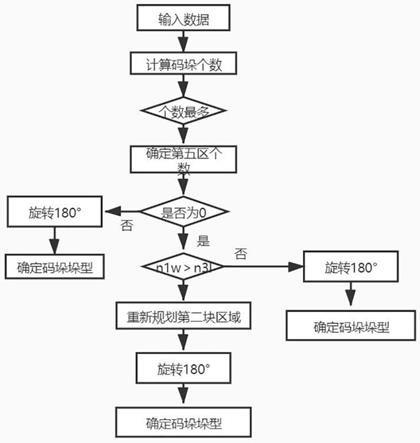
1.一种适用于袋装软包的混合码垛规划方法,其特征在于,包括以下步骤:s1.输入软包的规格:长度l、宽度w、高度h,并扫描存储车厢的规格:长度l、宽度w、高度h;s2.通过计算规划第一层的最优码垛方式,以确保第一层码垛的软包数量最多,并确定第一层软包码垛位置坐标,并将第一层的最优码垛方式确定为最优垛型;s3.利用第一层得到的最优垛型,依次交错所述最优垛型,确定其他层的码垛方式;s4.根据软包码垛位置坐标,规划软包码垛路径。2.根据权利要求1所述的一种适用于袋装软包的混合码垛规划方法,其特征在于:所述步骤s2包括:s21.以车厢的左上角为原点建立空间直角坐标系,其中第一层所在的平面为oxy;s22.将车厢内第一层对应平面oxy的空间随机分为五个区域,分别为位于左上车厢的第一区域、位于右上车厢的第二区域、位于左下车厢的第三区域、位于右下车厢的第四区域、以及上述车厢内除上述四个区域外的第五区域;s23.假设第一区域中码垛横向的软包、第二区域中码垛竖向的软包、第三区域中码垛竖向的软包、第四区域中码垛横向的软包、第五区域根据实际情况码垛软包,并分情况计算每个区域中的码垛数及第一层总码垛数,并将第一层的总码垛数最多的情况作为第一层最优码垛数;s24.根据每个区域内的码垛数确定每个软包的码垛坐标。3.根据权利要求2所述的一种适用于袋装软包的混合码垛规划方法,其特征在于:所述步骤s23包括:s231.设第一区域中,x方向上软包的码垛个数为n
1l
、y方向上软包的码垛个数为n
1w
;第二区域中,x方向上软包的码垛个数为n
2w
、y方向上软包的码垛个数为n
2l
;第三区域中,x方向上软包的码垛个数为n
1l
*l/w、y方向上软包的码垛个数为int((l-n
1w
*w)/l);第四区域中,x方向上软包的码垛个数为n
2w
*w/l、y方向上软包的码垛个数为int((l-n
2l
*l)/w);s232.计算:第一区域中码垛软包的数量:n1=n
1l
*n
1w
;第二区域中码垛软包的数量:n2=int((w-n
1l
*l)/w)*n
2l
;第三区域中码垛软包的数量:n3=int((l-n
1w
*w)/l)*int(n
1l
*l/w);第四区域中码垛软包的数量:n4=int((l-n
2l
*l)/w)*int((n
2w
*w)/l);s233.根据上述假设分情况计算第五区域中码垛数,并对比分析将码垛数最多的情况下的码垛数作为第五区域的最优码垛数n5;s234.计算第一层最优码垛数n=n1 n2 n3 n4 n5;其中,int()表示取整。4.根据权利要求3所述的一种适用于袋装软包的混合码垛规划方法,其特征在于:所述步骤s233包括:s2331.假设l3=l-n
1w
*w; l4=l-n
2l
*l; w5=w-int(n
1l
*l/w)-int((n
2w
*w)/l);第一种情况:
假设n
1w
*w>n
2l
*l,则第五区域中码垛数为:int(l4/w)*int(w5/l),或者int(l3/w)*(w5/w);第二种情况:假设n
1w
*w<n
2l
*l,则第五区域中码垛数为:int(l3/w)*int(w5/l),或者int(l4/w)*(w5/w);s2332.取int(l4/w)*int(w5/l)、int(l3/w)*(w5/w)、int(l3/w)*int(w2/l)、int(l4/w)*(w5/w)中的最大值作为n5。5.根据权利要求4所述的一种适用于袋装软包的混合码垛规划方法,其特征在于:所述步骤s24中,根据第五区域中码垛数n5是否为o,计算每个区域中软包的码垛坐标。6.根据权利要求5所述的一种适用于袋装软包的混合码垛规划方法,其特征在于:所述步骤s24中:若n5>0,则,第一区域中软包码垛位置确定:(a*l,b*w,0),式中a从0到n
1l
;b从0到n
1w
;第二区域中软包码垛位置确定:(e*w,n
1w
*w f*l,0),式中c从0到int((w-n
1l
*l)/w);d从0到n
2l
;第三区域中软包码垛位置确定:(e*w,n
1w
*w f*l,0),式中e从0到int((l-n
1w
*w)/l);f从0到int(n
1l
*l/w);第四区域中软包码垛位置确定:(w-g*l,n
2l
*l h*w,0),式中g从0到int((n
2w
*w)/l);h从0到int((l-n
2l
*l)/w);第五区域中软包码垛位置确定:横包:(int(n
1l
*l/w)*w j*l,n
1w
*w k*w,0)式中j从0到int(w5/l);k从0到int(l3/w);竖包:(int(n
1l
*l/w)*w j*w,n
1w
*w k*l,0)式中j从0到int(w5/l);k从0到int(l3/w)。7.根据权利要求6所述的一种适用于袋装软包的混合码垛规划方法,其特征在于:所述步骤s24中:若n5=0,分为以下两种情况:情况一:设n
1w
*w>n
2l
*l,第一区域、第二区域、第四区域中软包码垛位置与n5>0时相同,则,w3=w-int((n
2w
*w)/l)*l;间隙δd1=w3/int(n
1l
*l/w)-w;第三区域中软包码垛位置确定:(e*(w δd1) ,n
1w
*w f*l,0),式中e从0到int((l-n
1w
*w)/l);f从0到int(n
1l
*l/w);情况二:设n
1w
*w<n
2l
*l,第一区域、第二区域、第三区域中软包码垛位置与n5>0时相同,则,w4=l-int(n
1l
*l/w)*w;间隙δd2=w4/int((n
2w
*w)/l)-l;第四区域中软包码垛位置确定:w-g*(l δd2),n
2l
*l h*w,0),式中g从0到int((n
2w
*w)/l);h从0到int((l-n
2l
*l)/w)。8.根据权利要求1所述的一种适用于袋装软包的混合码垛规划方法,其特征在于:所述步骤s3中,奇数层的最优垛型相同,偶数层的最优垛型相同,且偶数层的最优垛型
由奇数层的最优垛型旋转180
°
得到。9.根据权利要求7所述的一种适用于袋装软包的混合码垛规划方法,其特征在于:所述步骤s4包括:s41.确定第一层的存放路径;s42.确定其他层的存放参照步骤s41中第一层的存放路径;其中,步骤s41包括:s411.确定第一区域的存放路径:按照从左到右,进行s型摆放;s412.确定第二区域的存放路径:调整料包姿势,按照从左到右,进行s型摆放;s413.确定第三区域的存放路径:按照从左到右,进行s型摆放;s414.确定第四区域的存放路径:调整料包姿势,按照从左到右,进行s型摆放。10.根据权利要求1所述的一种适用于袋装软包的混合码垛规划方法,其特征在于:所述步骤s4后还包括:s5.将码垛软包的方法生成文本数据,并发送给上机位。
技术总结
本发明属于机器人码垛垛型的应用领域,具体为一种适用于袋装软包的混合码垛规划方法,主要用于用户需根据自身的需求,生成合理的垛型。本发明包括以下步骤:S1.输入软包的规格:长度l、宽度w、高度h,并扫描存储车厢的规格:长度L、宽度W、高度H;S2.通过计算规划第一层的最优码垛方式,以确保第一层码垛的软包数量最多,并确定第一层软包码垛位置坐标,并将第一层的最优码垛方式确定为最优垛型;S3.利用第一层得到的最优垛型,依次交错所述最优垛型,确定其他层的码垛方式;S4.根据软包码垛位置坐标,规划软包码垛路径。本发明可形成最优垛型,同时便于提高货物运输中的稳定性。同时便于提高货物运输中的稳定性。同时便于提高货物运输中的稳定性。
技术研发人员:周霞 胡小平
受保护的技术使用者:杭州电子科技大学
技术研发日:2021.12.31
技术公布日:2022/4/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。