1.本发明涉及机械设备领域,尤其涉及一种迷宫密封式回转工作台及其控制方法。
背景技术:
2.传统回转工作台往往采用接触式密封方式,如o型圈密封、唇形密封圈密封等。这些接触式密封方式在高温高压及高转速频率下密封效果不佳;同时,传统回转工作台常采用齿轮传动或蜗轮蜗杆传动,在启动、变向、急停等场合下,会产生一定的弹性变形、增加无益摩擦以及多余的反向间隙等问题。
技术实现要素:
3.本发明针对上述技术问题,提出了一种迷宫密封式回转工作台及其控制方法。
4.本发明提出以下技术方案:
5.本发明提出了一种迷宫密封式回转工作台,包括力矩电机,力矩电机包括转子以及套设在转子上、用于驱动转子转动的定子;迷宫密封式回转工作台还包括支撑固定定子的基座,固定地安装在转子底部并可转动地设置在基座上的编码器安装环;编码器安装环与基座之间迷宫密封;
6.迷宫密封式回转工作台还包括固定地套设在定子上的环形基体,与转子固定连接并可相对转动地支撑在环形基体上的工作台面;工作台面与环形基体之间迷宫密封;
7.迷宫密封式回转工作台还包括固定地安装在编码器安装环上的编码器码盘,以及固定地安装在基座上、用于与编码器码盘配合反馈转子的角度信息的编码器读数头。
8.本发明上述的迷宫密封式回转工作台中,基座包括环形的底座,定子也呈环形,支撑在底座上方;基座还包括底部密封板,底部密封板包括基板以及凸出形成于基板上的第一环形凸起,底部密封板通过其第一环形凸起固定地卡设在底座内部;
9.基板与编码器安装环之间迷宫密封。
10.本发明上述的迷宫密封式回转工作台中,基座还包括环形的机架固定板,机架固定板套设在底部密封板上;底座固定地支撑设置在机架固定板上。
11.本发明上述的迷宫密封式回转工作台中,编码器安装环呈锥台形,基座还包括与底座连接固定并套设在编码器安装环上的环形的编码器固定座。
12.本发明上述的迷宫密封式回转工作台中,底座顶部形成有第二环形凸起,环形基体包括卡设在第二环形凸起内部并固定地套设在定子上的壳体。
13.本发明上述的迷宫密封式回转工作台中,环形基体还包括环形台阶状的轴承支承座,轴承支承座卡设在壳体内部并位于定子上方;
14.迷宫密封式回转工作台还包括固定安装在转子上方的转子安装环以及固定安装在转子安装环上方的轴承安装环;工作台面固定地安装在轴承安装环上方;
15.轴承支承座和轴承安装环之间设置有转台轴承;
16.工作台面与轴承支承座之间迷宫密封。
17.本发明还提出了一种迷宫密封式回转工作台的控制方法,包括以下步骤:
18.步骤s、通过编码器读数头所反馈的转子的角度信息,实时计算转子的速度和角加速度;
19.步骤s、通过力矩电机按照以下方式控制转子的速度和角加速度:
20.第一阶段:以预设的第一角加速度使转子的速度从零加速至预设的第一速度值;
21.第二阶段:以预设的第二角加速度使转子的速度从第一速度值加速至预设的第二速度值;第二角加速度的值大于第一角加速度的值;
22.第三阶段:以预设的第三角加速度使转子的速度从第二速度值加速至预设的第三速度值;第三角加速度的值小于第二角加速度的值;
23.第四阶段:使转子的速度以第三速度值匀速运动;
24.第五阶段:以预设的第四角加速度使转子的速度从第三速度值减速至预设的第四速度值;
25.第六阶段:以预设的第五角加速度使转子的速度从第四速度值减速至预设的第五速度值;第五角加速度的值大于第四角加速度的值;
26.第七阶段:以预设的第六角加速度使转子的速度从第五速度值减速至零;第六角加速度的值小于第五角加速度的值。
27.本发明的迷宫密封式回转工作台及其控制方法通过力矩电机的转子和定子之间通过磁场作用提供旋转动力作用,编码器读数头和编码器码盘通过光学原理实时反馈转子的角度信息;通过编码器安装环与基座之间以及工作台面与环形基体之间的迷宫密封,利用迷宫密封结构多个曲折小室所产生的节流效应,实现迷宫密封式回转工作台的密封。还通过第一阶段、第三阶段、第五阶段以及第七阶段实现速度的圆弧处理,使转子的速度不会出现突变,不会产生振动及噪声,充分发挥力矩电机的额定力矩,相对于三角形曲线利用最大力矩而言,电流更小一些,从而造成更少的热损失。本发明的迷宫密封式回转工作台及其控制方法设计新颖,实用性强。
附图说明
28.下面结合附图对本发明进一步说明:
29.图1示出了本发明优选实施例的迷宫密封式回转工作台的示意图;
30.图2示出了图1所示的迷宫密封式回转工作台的另一方向的示意图;
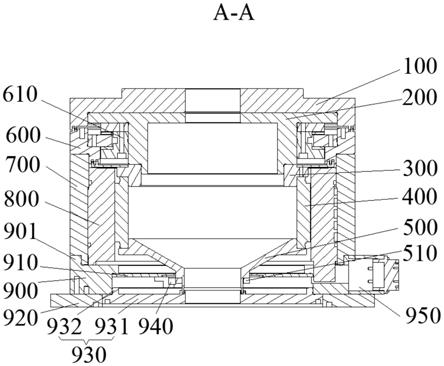
31.图3示出了图2所示的迷宫密封式回转工作台的a-a向的结构示意图;
32.图4示出了本发明优选实施例的迷宫密封式回转工作台的控制方法所实现的转子的速度变化示意图。
具体实施方式
33.为了使得发明的技术方案、技术目的以及技术效果更为清楚,以使得本领域技术人员能够理解和实施本发明,下面将结合附图及具体实施例对本发明做进一步详细的描述。
34.如图1-图3所示,图1示出了本发明优选实施例的迷宫密封式回转工作台的示意图;图2示出了图1所示的迷宫密封式回转工作台的另一方向的示意图;图3示出了图2所示
的迷宫密封式回转工作台的a-a向的结构示意图;该迷宫密封式回转工作台包括力矩电机,力矩电机包括转子400以及套设在转子400上、用于驱动转子400转动的定子800;迷宫密封式回转工作台还包括支撑固定定子800的基座,固定地安装在转子400底部并可转动地设置在基座上的编码器安装环500;编码器安装环500与基座之间迷宫密封;
35.迷宫密封式回转工作台还包括固定地套设在定子800上的环形基体,与转子400固定连接并可相对转动地支撑在环形基体上的工作台面100;工作台面100与环形基体之间迷宫密封;
36.迷宫密封式回转工作台还包括固定地安装在编码器安装环500上的编码器码盘510,以及固定地安装在基座上、用于与编码器码盘510配合反馈转子400的角度信息的编码器读数头940。
37.在上述技术方案中,力矩电机的转子400和定子800之间通过磁场作用提供旋转动力作用,编码器读数头940和编码器码盘510通过光学原理实时反馈转子400的角度信息;通过编码器安装环500与基座之间以及工作台面100与环形基体之间的迷宫密封,利用迷宫密封结构多个曲折小室所产生的节流效应,实现迷宫密封式回转工作台的密封。
38.进一步地,基座包括环形的底座900,定子800也呈环形,支撑在底座900上方;基座还包括底部密封板930,底部密封板930包括基板931以及凸出形成于基板931上的第一环形凸起932,底部密封板930通过其第一环形凸起932固定地卡设在底座900内部;
39.基板931与编码器安装环500之间迷宫密封。
40.在上述技术方案中,底座900由多个结构组合拼装固定而成,可以理解,根据生产工艺的需要,底座900可以为一体式结构。
41.进一步地,为了实现对底座900的固定,基座还包括环形的机架固定板920,机架固定板920套设在底部密封板930上;底座900固定地支撑设置在机架固定板920上。
42.进一步地,在本实施例中,编码器安装环500呈锥台形,为了防止编码器安装环500重心偏移,基座还包括与底座900连接固定并套设在编码器安装环500上的环形的编码器固定座910。
43.进一步地,底座900顶部形成有第二环形凸起901,环形基体包括卡设在第二环形凸起901内部并固定地套设在定子800上的壳体700。
44.在这里,通过壳体700和第二环形凸起901的配合结构,实现对定子800位置的限制。
45.环形基体还包括环形台阶状的轴承支承座600,轴承支承座600卡设在壳体700内部并位于定子800上方;
46.迷宫密封式回转工作台还包括固定安装在转子400上方的转子安装环300以及固定安装在转子安装环300上方的轴承安装环200;工作台面100固定地安装在轴承安装环200上方;这样,工作台面100便实现了与转子400固定连接;可以理解,在其他实施例中,工作台面100还可以直接与转子400固定连接。
47.轴承支承座600和轴承安装环200之间设置有转台轴承610;
48.工作台面100与轴承支承座600之间迷宫密封。
49.在这里,通过转台轴承610,给工作台面100提供旋转功能,避免了传统回转工作台常采用齿轮传动或蜗轮蜗杆传动,在启动、变向、急停等场合下,会产生一定的弹性变形、增
加无益摩擦以及多余的反向间隙等问题。
50.进一步地,迷宫密封式回转工作台还包括安装在底座900上并与力矩电机以及编码器读数头940的驱动器(图中未示出)连接,还用于通过线缆与外部控制器(图中未示出)连接的接线盒950。通过驱动器和控制器的相互配合,实现旋转功能。
51.进一步地,如图1所示,迷宫密封式回转工作台的工作方式为:将治具和工件通过定位销定位,并通过螺栓固定在工作台面100上,利用螺栓将机架固定板920固定在机架(图中未示出)上,实现迷宫密封式回转工作台主体可以将各个方向的作用力传递到机架上,再采用接线盒950连接驱动器,实现力矩电机转动及编码器角度信息的反馈。
52.进一步地,如图4所示,图4示出了本发明优选实施例的迷宫密封式回转工作台的控制方法所实现的转子的速度变化示意图。其中,v表示转子400的速度,t表示时间。具体地,本发明的迷宫密封式回转工作台的控制方法,包括以下步骤:
53.步骤s1、通过编码器读数头940所反馈的转子400的角度信息,实时计算转子400的速度和角加速度;
54.步骤s2、通过力矩电机按照以下方式控制转子400的速度和角加速度:
55.第一阶段:以预设的第一角加速度使转子400的速度从零加速至预设的第一速度值;
56.第二阶段:以预设的第二角加速度使转子400的速度从第一速度值加速至预设的第二速度值;第二角加速度的值大于第一角加速度的值;
57.第三阶段:以预设的第三角加速度使转子400的速度从第二速度值加速至预设的第三速度值;第三角加速度的值小于第二角加速度的值;
58.第四阶段:使转子400的速度以第三速度值匀速运动;
59.第五阶段:以预设的第四角加速度使转子400的速度从第三速度值减速至预设的第四速度值;
60.第六阶段:以预设的第五角加速度使转子400的速度从第四速度值减速至预设的第五速度值;第五角加速度的值大于第四角加速度的值;
61.第七阶段:以预设的第六角加速度使转子400的速度从第五速度值减速至零;第六角加速度的值小于第五角加速度的值。
62.通过第一阶段、第三阶段、第五阶段以及第七阶段实现速度的圆弧处理,使转子的速度不会出现突变,不会产生振动及噪声,充分发挥力矩电机的额定力矩,相对于三角形曲线利用最大力矩而言,电流更小一些,从而造成更少的热损失。
63.本发明的迷宫密封式回转工作台采用直驱式设计,其最大力矩、额定力矩、最大转速、额定转速均是固定参数,而运动角度及节拍是由迷宫密封式回转工作台的应用工况决定,因此,在已知最大加速度a、最大速度v、运行角度、运行时间t以及旋转角度j的情况下,可以得到迷宫密封式回转工作台在应用工况下的算法曲线:
[0064][0065]
上面结合附图对本发明的实施例进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多
形式,这些均属于本发明的保护之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
