1.本发明涉及一种具备开闭自由的一对机械手的气动卡盘,特别是涉及一种具有上述一对机械手的卡盘部相对于开闭操作上述机械手的操作部装拆自由的气动卡盘。
背景技术:
2.具有开闭自由的一对机械手的卡盘部和具有开闭操作上述一对机械手的操作机构的操作部相互装拆自由的气动卡盘,例如,如在专利文献1~3中公开的那样是公知的。此种气动卡盘,因为通过与工件的种类一致地更换上述卡盘部能与多种工件对应,所以在效率上和经济性上都优异。
3.但是,在公知的气动卡盘中,如果将上述卡盘部从上述操作部卸下,则因为上述一对机械手成为自由的状态,所以该一对机械手自由地位移,不能维持一定的位置关系。因此,在将上述卡盘部安装在上述操作部时,需要使上述一对机械手的位置和内置在上述操作部的操作机构(例如活塞)的位置正确地一致的时间和劳力。特别是,在由机器人等自动更换上述卡盘部的情况下,需要准备与上述操作机构一致地调整上述一对机械手的位置的机构、保持在进行了调整的状态的机构等。
4.在先技术文献
5.专利文献
6.专利文献1:日本特开平4-41190号公报
7.专利文献2:日本特开平4-289090号公报
8.专利文献3:日本特开平7-290392号公报
技术实现要素:
9.发明所要解决的课题
10.本发明的技术课题在于,在具有一对机械手的卡盘部相对于操作部装拆自由的气动卡盘中,通过防止在将上述卡盘部从操作部卸下了时上述机械手自由地位移,能将上述一对机械手总是维持在一定的位置关系。
11.为了解决课题的手段
12.为了解决上述课题,本发明的气动卡盘的特征在于,具备卡盘部、操作部、连结机构和锁定机构,该卡盘部具有开闭自由的一对机械手;该操作部具有开闭操作上述一对机械手的操作机构;该连结机构用于将上述卡盘部装拆自由地安装在上述操作部;该锁定机构在将上述卡盘部安装在上述操作部时使上述一对机械手开闭自由,在将上述卡盘部从上述操作部卸下了时将上述一对机械手锁定成不能开闭。
13.在本发明中,上述锁定机构具有柱塞、锁定弹簧和卡定体,上述柱塞构成为,如果将上述卡盘部从上述操作部卸下,则被上述锁定弹簧推着向锁定位置位移,如果将上述卡盘部安装在上述操作部,则被该操作部推着向非锁定位置位移,上述卡定体构成为,如果上述柱塞向上述锁定位置位移,则通过被该柱塞推着卡定在上述一对机械手上,将该一对机
械手锁定,如果上述柱塞向上述非锁定位置位移,则从由该柱塞进行的推压解放,使上述一对机械手成为非锁定状态。
14.在此情况下,上述卡盘部具有支承上述一对机械手的支承构件,在该支承构件上形成了收容孔,在该收容孔的内部收容了上述柱塞和上述锁定弹簧,在上述收容孔的孔壁上形成了向上述支承构件的侧面开口的保持孔,在该保持孔的内部收容了呈球状的上述卡定体,该呈球状的上述卡定体向卡定在上述机械手上的卡定位置和不卡定在上述机械手上的非卡定位置自由位移,在上述柱塞上形成了锥面,如果该柱塞向上述锁定位置位移,则上述锥面推着上述卡定体向上述卡定位置位移,如果上述柱塞向上述非锁定位置位移,则上述锥面从上述卡定体离开,使该卡定体成为可向上述非卡定位置位移的状态。
15.另外,在上述一对机械手之中的一方的机械手上形成了沿着上述支承构件的一方的侧面延伸的臂,在另一方的机械手上形成了沿着上述支承构件的另一方的侧面延伸的臂,在上述一方的机械手的臂及另一方的机械手的臂上,分别形成了上述卡定体在上述卡定位置进行卡定的卡定凹部。
16.在本发明中,也可以以如下的方式构成:在上述支承构件上配设了1组上述锁定机构,该锁定机构具有一对卡定体,一方的卡定体卡定在一方的机械手上,另一方的卡定体卡定在另一方的机械手上。
17.或者,以如下的方式构成:在上述支承构件上配设了2组上述锁定机构,一方的锁定机构锁定一方的机械手,另一方的锁定机构锁定另一方的机械手。
18.在本发明中,希望上述锁定机构构成为将上述一对机械手在全开位置或者全闭位置锁定。
19.另外,在本发明中,上述连结机构有2组,一方的连结机构连结上述卡盘部的一端和上述操作部的一端,另一方的连结机构连结上述卡盘部的另一端和上述操作部的另一端,上述连结机构具有固定地设置在上述卡盘部的端部的连结爪;位移自由地设置在上述操作部的端部,相对于上述连结爪卡定及脱离的连结销;和操作该连结销的销操作机构;上述销操作机构具有保持上述连结销的连结活塞;用于使该连结活塞向上述连结销从上述连结爪脱离的方向移动的分离压力室;通向该分离压力室的分离端口;和用于使上述连结活塞向上述连结销卡定在上述连结爪上的方向移动的连结弹簧。
20.在此情况下,希望上述销操作机构具有并列地配设的2个连结活塞,将上述连结销的一端和另一端支承在该2个连结活塞上。
21.发明的效果
22.根据本发明,在将卡盘部从操作部卸下了时,因为一对机械手由锁定机构总是锁定在一定的位置,所以能容易地进行该卡盘部的装拆、更换。特别是,在由机器人等自动更换上述卡盘部的情况下,因为不需要与操作机构一致地调整上述一对机械手的位置,所以不需要设置用于该调整的机构、用于将进行了调整的机械手保持在调整后的状态的机构等。
附图说明
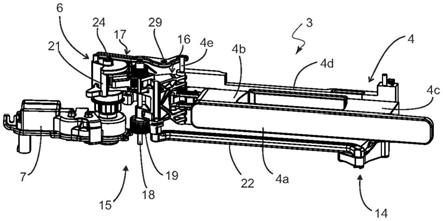
23.图1是本发明的气动卡盘的第一实施方式的立体图。
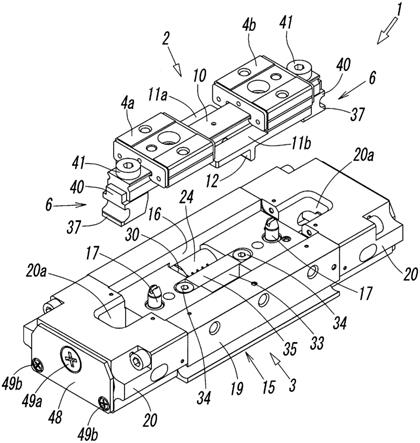
24.图2是将卡盘部从操作部卸下了状态的气动卡盘的立体图。
25.图3是将上述气动卡盘分解表示的立体图。
26.图4是将图1的气动卡盘在中央位置在纵向剖开了的剖视图。
27.图5是在图4中将操作部水平地剖开了的剖视图。
28.图6是将图2的气动卡盘在中央位置在纵向剖开了的剖视图。
29.图7是在图6中将操作部水平地剖开了的剖视图。
30.图8是图4的沿着viii-viii线剖开了的扩大剖视图。
31.图9是图8的主要部分扩大图。
32.图10是图6的沿着x-x线剖开了的扩大剖视图。
33.图11是图10的主要部分扩大图。
34.图12是本发明的气动卡盘的第二实施方式中的卡盘部的侧视图。
35.图13是图12的沿着xiii-xiii线的扩大剖视图。
36.图14是图12的沿着xiv-xiv线的扩大剖视图。
具体实施方式
37.为了实施发明的方式
38.图1~图11是表示本发明的气动卡盘的第一实施方式的图。此气动卡盘1具有卡盘部2、操作部3、连结机构6、6和锁定机构7,该卡盘部2具有用于夹着工件的开闭自由的一对机械手4a、4b,该操作部3具有开闭操作上述一对机械手4a、4b的操作机构5,该连结机构6、6装拆自由地连结上述卡盘部2和操作部3,该锁定机构7在将上述卡盘部2从上述操作部3卸下了时将上述一对机械手4a、4b锁定成不能开闭。
39.如图1~图5所示,上述卡盘部2具有呈细长且笔直的棒状的支承构件10,该支承构件10的上面成为轨道部10a,在该轨道部10a上,在跨过该轨道部10a的状态下,以沿着该轨道部10a移动自由的方式支承上述一对机械手4a、4b。
40.此外,在以下的说明中,“上”及“下”是在图1~图3中的方向,与气动卡盘1的使用时的方向没有关系。
41.上述一对机械手4a、4b是具有矩形的俯视形状的结构,以安装未图示的附件的方式构成,是在该附件之间夹持工件的结构。
42.在上述一对机械手4a、4b上,分别形成了用于与内置在上述操作部3的上述操作机构5连结的臂11a、11b。即,在一方的第一机械手4a上,形成了沿着上述支承构件10的一方的侧面延伸的棒状的第一臂11a,在另一方的第二机械手4b上,形成了沿着上述支承构件10的另一方的侧面延伸的棒状的第二臂11b。在上述第一臂11a及第二臂11b的下面(朝向操作部3侧的面)上分别形成了卡定突起12,该卡定突起12与上述操作机构5中的分别形成在一对操作活塞24、24上的卡定槽30、30个别地卡定,第一机械手4a由一方的操作活塞24进行移动操作,第二机械手4b由另一方的操作活塞24进行移动操作。
43.此外,在以下的说明中,在不需要分别区别地称呼上述第一机械手4a和第二机械手4b及第一臂11a和第二臂11b的情况下,简单地称呼为“机械手4a、4b”或者“臂11a、11b”。这对于在以下说明的第一缸装置22a及第二缸装置22b也同样。
44.接着,对上述操作部3进行说明。该操作部3在上述机械手4a、4b的开闭方向具有细长的大致矩形的卡盘主体15。在该卡盘主体15的上面上形成了凹部16,上述卡盘部2如图2
的那样以可朝向上方取出的方式收容在该凹部16的内部,由上述2组连结机构6、6与上述卡盘主体15连结。另外,在上述卡盘主体15的上面上设置了2个定位销17,通过该定位销17与形成在上述卡盘部2的支承构件10上的2个定位孔18各个地嵌合,将上述卡盘部2和卡盘主体15以进行了定位的状态连结。
45.另外,上述卡盘主体15具有中央的主要主体19和分别由螺栓21连结在该主要主体19的长度方向的两端的2个副主体20、20。在上述主要主体19的内部,收容了构成上述操作机构5的2组缸装置22a、22b,即第一缸装置22a和第二缸装置22b,在上述2个副主体20、20的内部分别收容了上述2组连结机构6、6的一部分。
46.上述2组缸装置22a、22b以相互平行的方式配设在上述主要主体19的内部,以相互向相反方向同步地动作的方式构成,相互具有相同的结构。
47.即,上述缸装置22a、22b具有在上述主要主体19的内部在上述机械手4a、4b的开闭方向延伸的缸孔23;滑动自由地收容在该缸孔23内的圆棒状的上述操作活塞24;形成在该操作活塞24的一端侧的第一压力室25;形成在上述操作活塞24的另一端侧的第二压力室26;和形成在上述主要主体19的侧面上的第一端口27及第二端口28,上述第一端口27通过形成在上述主要主体19的内部的未图示的通孔与上述第一压力室25连通,上述第二端口28通过形成在上述主要主体19的内部的未图示的通孔与上述第二压力室26连通。
48.上述第一压力室25及第二压力室26的相对于上述操作活塞24的配置,在一方的第一缸装置22a和另一方的第二缸装置22b中相互相反。
49.此外,图5中的由符号29表示的构件是将上述缸孔23的开放端堵塞的栓塞。
50.上述操作活塞24具有在侧面上具有多个齿24b的齿条部24a和形成在该齿条部24a的两端的密封部24c,在该密封部24c安装了填料24d,在上述齿条部24a的上面中央位置形成了上述臂11a、11b的卡定突起12进行卡定的上述卡定槽30。另外,上述齿条部24a的齿24b与配设在上述主要主体19的中央的小齿轮31啮合。
51.上述小齿轮31是用于使上述一对操作活塞24、24相互向相反方向同步地移动的结构,并以将与上述缸孔23的中心轴正交的轴31a作为中心旋转自由的方式配设在形成在上述主要主体19上的凹状的小齿轮室32内,该小齿轮31的上部由呈长方形状的小齿轮罩33覆盖。该小齿轮罩33的两端由螺钉34固定在上述主要主体19上。
52.在上述操作部3中,图5表示通过从第一端口27向2组缸装置22a、22b的第一压力室25、25供给空气,并将第二压力室26、26通过第二端口28向大气开放,一对操作活塞24、24向轴线方向一端侧的第一位置进行了移动的状态。此时,一对机械手4a、4b,如图1及图4所示,向相互间的间隔成为最大的全开位置移动,工件没有夹持在安装在各机械手4a、4b上的附件之间。
53.如果从此状态将上述第一压力室25、25通过第一端口27向大气开放,从第二端口28向上述第二压力室26、26供给空气,则因为上述一对操作活塞24、24与图5的位置是朝向轴线方向另一端侧的第二位置同步地移动,所以上述一对机械手4a、4b朝向相互间的间隔成为最小的全闭位置移动,此时,工件夹在安装在该一对机械手4a、4b上的附件之间。
54.接着,对装拆自由地连结上述卡盘部2和上述操作部3的上述连结机构6、6进行说明。该连结机构6、6有2组,一方的连结机构6连结上述卡盘部2的一端和上述操作部3的一端,另一方的连结机构6连结上述卡盘部2的另一端和上述操作部3的另一端。上述2组连结
机构6、6,其各构件配设在相互相反的方向,但实质上具有相同的结构,各连结机构6具有以下叙述的那样的结构。
55.即,上述连结机构6,如图3~图7所示,具有固定地设置在上述卡盘部2上的连结爪37;位移自由地设置在上述操作部3的连结销38;和操作该连结销38,与上述连结爪37卡定或者从该连结爪37脱离的销操作机构39。
56.上述连结爪37形成在安装在上述支承构件10的端部的爪构件40上。该爪构件40是具有与上述支承构件10的宽度同等的宽度的构件,由螺栓41固定在上述支承构件10的下面上,嵌合在形成在上述操作部3的副主体20上的凹部20a内,在该爪构件40的下端部以朝向上述支承构件10的长度方向外侧突出的方式形成了上述连结爪37,上述连结销38卡定在该连结爪37的上面上。
57.另一方面,上述连结销38及销操作机构39设置在上述副主体20上。其中,上述销操作机构39具有相互平行形成在上述副主体20的内部的2个活塞孔42、42;分别经密封构件43a滑动自由地收容在各活塞孔42的内部的圆棒状的连结活塞43;形成在该连结活塞43的一端侧的分离压力室44;用于向该分离压力室44供给空气的分离端口45;和配设在上述连结活塞43的另一端侧的线圈状的连结弹簧46。
58.上述2个活塞孔42、42以在上述卡盘主体15的长度方向延伸的方式形成在将上述凹部20a(因此连结爪37)夹在中间的位置。
59.另外,上述分离压力室44形成在上述连结活塞43的内向端(朝向主要主体19侧的端部)和上述活塞孔42的孔底之间,上述分离端口45形成在上述主要主体19的侧面上,该分离端口45和上述2个连结活塞43、43的端部的分离压力室44、44通过形成在上述主要主体19及上述副主体20的内部的未图示的通孔相互连通。
60.上述连结弹簧46在形成在上述连结活塞43的外向端的弹簧收容孔47的孔底和由多个螺钉49、49b安装在上述副主体20的端部的端板48之间配设成压缩的状态。
61.另外,上述连结销38在与该连结活塞43、43的动作方向正交的方向配设在上述2个连结活塞43、43之间,该连结销38的一端及另一端分别支承在上述2个连结活塞43、43的一方及另一方,上述连结爪37卡定在该连结销38的中间位置。
62.在由上述连结机构6、6连结相互分离的上述卡盘部2和上述操作部3时,如图6及图7所示,通过从上述分离端口45(图1参照)向上述分离压力室44内供给空气,使上述连结活塞43、43及连结销38成为向上述分离位置后退了的状态,在以该状态使上述卡盘部2从上方嵌合在上述操作部3的上面的凹部16内后,将上述分离压力室44内的空气从上述分离端口45排出。于是,如图4及图5所示,因为上述连结活塞43、43被上述连结弹簧46推着向上述连结位置前进,上述连结销38也与其一起前进,卡定在上述连结爪37上,所以将上述卡盘部2和操作部3相互连结。在此状态下,不能将上述卡盘部2从上述操作部3卸下。
63.在将上述卡盘部2从上述操作部3卸下时,从上述分离端口45向上述分离压力室44内供给空气。于是,如图6及图7所示,因为上述连结活塞43、43将上述连结弹簧46压缩向分离位置后退,上述连结销38也与连结活塞43、43一起后退,所以该连结销38从上述连结爪37脱离。因此,能将上述卡盘部2从上述操作部3向上方卸下。
64.接着,对上述锁定机构7进行说明。该锁定机构7,如图3、图4、图6及图8~图11所示,具有配设在设置在上述卡盘部2的支承构件10的长度方向的中央部而呈圆柱状的柱塞
50;呈线圈状的锁定弹簧51;和由钢球构成的2个卡定体52。即,如图8~图11详细地表示的那样,在上述支承构件10的中央部下面上以在该下面开口的方式形成了圆形的收容孔53,在该收容孔53的内部收容了上述柱塞50和上述锁定弹簧51,在该收容孔53的侧面上安装了上述卡定体52。
65.上述柱塞50在外周面上具有前端变窄地逐渐地倾斜的圆锥面状的锥面50a,在上述收容孔53的内部以从上述收容孔53出没的方式收容了该柱塞50的前端。
66.另外,上述锁定弹簧51,通过夹设在形成在上述柱塞50上的弹簧收容孔54的孔底和上述收容孔53的孔底之间,总是朝向该柱塞50的前端从上述收容孔53突出的方向以弹力推压上述柱塞50。
67.进而,在上述收容孔53的直径方向的相对的位置,形成了向上述支承构件10的两侧面开口的一对保持孔55,上述卡定体52以向该卡定体52的一部分突出于上述支承构件10的侧面外部的位置(卡定位置)和该卡定体52不突出于上述支承构件10的侧面外部的位置(非卡定位置)位移自由的方式收容在各保持孔55的内部。
68.在上述锁定机构7中,如图8及图9所示,在将上述卡盘部2安装在上述主体的上面上时,上述柱塞50,通过其前端与上述主要主体19的上面的抵接面35抵接,由该抵接面35推着,该前端后退到不从上述收容孔53突出的位置(非锁定位置)。此时上述卡定体52,因为不被上述柱塞50的锥面50a推着,所以向上述非卡定位置位移,从形成在与上述一对机械手4a、4b相连的臂11a、11b的侧面上的圆锥状的卡定凹部56离开间隔。因此,上述一对机械手4a、4b不锁定,处于自由的状态,为了夹工件而可以开闭。
69.此外,上述抵接面35由上述小齿轮罩33的上面形成。
70.如果通过从此状态由上述2组缸装置22a、22b使上述一对机械手4a、4b向全开位置地位移,使形成在上述臂11a、11b的侧面上的卡定凹部56与上述卡定体52相向,在该状态下,如图10及图11所示,将上述卡盘部2从上述操作部3卸下,则上述柱塞50被上述锁定弹簧51推着,前端向从上述收容孔53突出的位置(锁定位置)位移。由此柱塞50的位移,上述卡定体52被该柱塞50的锥面50a推着向上述卡定位置位移,卡定在上述臂11a、11b的侧面的上述卡定凹部56。由此,因为上述一对机械手4a、4b和支承构件10经上述卡定体52相互卡合,所以该一对机械手4a、4b在全开的位置锁定在不能开闭的状态。
71.因此,在上述臂11a、11b上形成了上述卡定凹部56的位置,是在使上述一对机械手4a、4b向全开位置进行了位移时该卡定凹部56与上述卡定体52相向的位置。
72.但是,上述一对机械手4a、4b也可以在全闭位置由上述锁定机构7锁定。在此情况下,在上述臂11a、11b上形成上述卡定凹部56的位置,是在使上述一对机械手4a、4b向全闭位置进行了位移时该卡定凹部56与上述卡定体52相向的位置。
73.另外,如果将上述卡盘部2或者与该卡盘部2同样的具备锁定机构7的其它的卡盘部安装在上述操作部3,则如图8及图9的那样,因为上述柱塞50的前端被上述主体的抵接面35推着,该柱塞50后退到上述非锁定位置,所以上述卡定体52从上述柱塞50的推压解放而向上述非卡定位置位移,使上述臂11a、11b即机械手4a、4b成为非锁定状态。因此,上述一对机械手4a、4b开闭自由。
74.这样,上述气动卡盘1,在将上述卡盘部2从上述操作部3卸下了时,由于一对机械手4a、4b由锁定机构7总是锁定在一定的位置,所以能容易地进行该卡盘部2的装拆、更换。
特别是,在由机器人等自动更换上述卡盘部2的情况下,因为不需要与操作机构5一致地调整上述一对机械手4a、4b的位置,所以不需要设置用于该调整的机构、用于将进行了调整的机械手4a、4b保持调整后的状态的机构等。
75.在上述第一实施方式中,将1组上述锁定机构7设置在支承构件10的长度方向的中央位置,由此1组锁定机构7锁定了一对机械手4a、4b,但如图12所示,也能构成为在上述支承构件10上设置2组锁定机构7a、7b,由一方的第一锁定机构7a锁定一方的第一机械手4a,由另一方的第二锁定机构7b锁定另一方的第二机械手4b。
76.在此情况下,上述第一锁定机构7a设置在与上述支承构件10的中央位置相比靠近上述第一机械手4a的位置,上述第二锁定机构7b设置在与上述支承构件10的中央位置相比靠近上述第二机械手4b的位置。另外,如图13及图14所示,在上述第一锁定机构7a及第二锁定机构7b上,分别设置1个卡定体52a、52b,第一锁定机构7a的卡定体52a卡定在第一机械手4a的卡定凹部56a,第二锁定机构7b的卡定体52b卡定在第二机械手4b的卡定凹部56b。
77.符号的说明
78.1:气动卡盘
79.2:卡盘部
80.3:操作部
81.4a、4b:机械手
82.5:操作机构
83.6:连结机构
84.7、7a、7b:锁定机构
85.10:支承构件
86.11a、11b:臂
87.37:连结爪
88.38:连结销
89.39:销操作机构
90.43:连结活塞
91.44:分离压力室
92.45:分离端口
93.46:连结弹簧
94.50:柱塞
95.50a:锥面
96.51:锁定弹簧
97.52、52a、52b:卡定体
98.53:收容孔
99.55:保持孔
100.56、56a、56b:卡定凹部。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。