1.本公开涉及机械手。
背景技术:
2.在专利文献1中公开有一种机械手,其在基座配置有至少一个机械指,机械指具有多个连杆、将所述连杆间旋转自如地连接的多个关节轴、驱动所述关节轴的多个致动器、以及向所述致动器传递电流和信号的多个线缆,其中,在至少一对关节轴间,弹性体的一端安装于所述关节轴,所述弹性体的另一端安装于相对于所述关节轴相对旋转的第二关节轴,所述线缆能够沿着所述弹性体移动。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2008-178968号公报
技术实现要素:
6.本公开是鉴于上述的以往的状况而研究出的,其目的在于提供能够调整把持力并把持各种形状的工件的机械手。
7.本公开提供一种机械手,其具备:可动部;手,其与所述可动部的动作相应地发生变形;以及弹性体,其使所述手的把持力发生变化,在所述可动部的动作量小于规定值的情况下,至少所述手发生变形,在所述可动部的动作量为规定值以上的情况下,在所述手的至少一部分的变形停止了的状态下,所述弹性体的弹性力发生变化。
8.根据本公开,能够提供能够调整把持力并把持各种形状的工件的机械手。
附图说明
9.图1是示出机械臂1以及末端执行器2(机械手)的结构例的图。
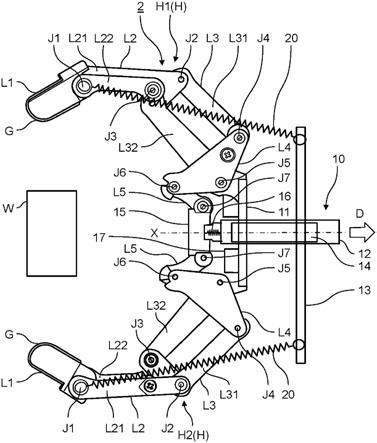
10.图2是示出本公开的末端执行器2(机械手)的一例的俯视图。
11.图3是与图2对应的侧视图。
12.图4是本公开的末端执行器2(机械手)的立体图。
13.图5是示出控制系统100的硬件结构的一例的框图。
14.图6是本公开的末端执行器2(机械手)的初始状态的俯视图。
15.图7是示出接续图6的把持移行动作状态的俯视图。
16.图8是示出接续图7的把持状态的俯视图。
17.图9是示出接续图8的把持力控制状态的俯视图。
18.图10是示出本公开的末端执行器2(机械手)的把持状态的变形例的俯视图。
19.图11是示出本公开的把持部g的把持状态的示意图,(a)为通常的把持,(b)为略倾斜的把持,(c)为与图10相同的变形例中的把持。
20.图12示出在把持较大的工件的情况下的、本公开的末端执行器2(机械手)的实施
例,(a)是末端执行器2(机械手)的初始状态的俯视图,(b)是把持状态的俯视图。
21.图13示出在把持较大的工件w的情况下的、本公开的末端执行器2(机械手)的实施例,(a)是接续图12的把持力控制完成状态的俯视图,(b)是示出图12以及图13的(a)所示的箭头a~c的长度的变化的曲线图。
22.图14是示出在把持较小的工件w的情况下的、本公开的末端执行器2(机械手)的实施例,(a)是把持力控制完成状态的俯视图,(b)是示出图14的(a)所示的箭头a~c的长度的变化的曲线图。
具体实施方式
23.(完成本公开的经过)
24.在工厂等使用的机器人装置通过在机械臂安装末端执行器而能够进行各种作业。例如,使用机械手作为末端执行器来对在工厂的生产线上流动的工件(作业对象物)进行拾取等的作业。
25.如专利文献1所公开的那样,存在在指的各关节轴配备致动器的机械手。通过在指的各关节轴配备致动器,能够利用致动器适当控制各关节。但是,另一方面,在指的各关节轴配备致动器的结构中,致动器的数量变多。致动器成本也高,重量也大。特别是,在将致动器配备于机械手的前端的情况下,致动器的重量的负担变大,用于使致动器动作的配线也变得复杂。
26.因此,在本公开中,提供削减机械手所使用的致动器的数量却还能够把持各种形状的工件的机械手。
27.另外,若削减致动器的数量,则用机械手把持工件时的把持力的调整变得困难。
28.因此,在本公开中,提供削减机械手所使用的致动器的数量却也能够进行把持力的调整那样的机械手。
29.以下,适当参照附图,对具体地公开了本公开的机械手的实施方式(以下,称为“本实施方式”)详细地进行说明。但是,存在省略超出必要的详细的说明的情况。例如,存在省略对已知的事项的详细说明、对实质上相同的结构的重复说明的情况。这是为了避免以下的说明变得不必要地冗长,并使本领域技术人员容易理解。需要说明的是,附图以及以下的说明是为了使本领域技术人员充分理解本公开而提供的,并不意在通过它们来限定技术方案所记载的主题。
30.在以下的本实施方式中,作为末端执行器,假定具有两根手指的机械手而进行说明。需要说明的是,末端执行器可呈各种形状。例如,可以将作为作业对象物的工件用两根(或者五根等)手指把持、或者利用吸附体吸附而支承、或者将弯曲的手指插入并钩挂于工件所具备的钩。无论哪一种,都是末端执行器为了进行某种作业而把持工件。
31.图1是示出机械臂1以及末端执行器2(机械手)的结构例的图。图2是示出本公开的末端执行器2(机械手)的一例的俯视图。图3是与图2对应的侧视图。图4是本公开的末端执行器2(机械手)的立体图。基于图1至图4,对本公开的末端执行器2(机械手)进行详述。
32.如图1所示,可以作为本公开的机械手的末端执行器2连接于机械臂1而被使用。后述的控制系统100控制具备该机械臂1和末端执行器2的机器人装置。在该例子中,箱型的控制器4经由配置于基座3上的机械臂1而与末端执行器2连接。
33.另外,如图1所示,末端执行器2可以具备相机cam。后述的控制系统100可基于由相机cam拍摄的拍摄图像来控制末端执行器2。另外,相机cam可以配置于能够对末端执行器2以及作为末端执行器2的作业对象的工件w进行拍摄的位置。即,在由相机cam拍摄到的图像中同时映入末端执行器2的形状以及作为进行支承(把持)时的作业对象的工件w的形状。需要说明的是,相机cam配置于末端执行器2与机械臂1连接的连接部附近,但也可以在上述以外的地方配置相机cam。
34.可以作为本公开的机械手的末端执行器2具备手h、可动部10以及弹簧20(参照图2至图4)。在本例中,手h由第一手h1以及第二手h2这两个手构成。但是,手h的个数并不限于两个。手h根据可动部10的动作而变形,弹簧20使手h的把持力变化。
35.如图2以及图4所示,在本例中,第一手h1具有五个连杆l。即,从第一手h1的前端起依次为第1连杆l1、第2连杆l2、第3连杆l3、第4连杆l4、第5连杆l5。另外,第2连杆l2具有作为一对连杆的第21连杆l21和第22连杆l22,第21连杆l21与第22连杆l22在末端执行器2的厚度方向上相互对置地配置,与第22连杆l22相比,第21连杆l21形成得较长。并且,第3连杆l3具有作为一对连杆的第31连杆l31和第32连杆l32,第31连杆l31与第32连杆l32分离并且并列地配置。
36.将位于手h的外侧的连杆设为第31连杆l31,将位于内侧的连杆设为第32连杆l32,但第31、第32是为了使说明容易理解而使用的,并不特别限定位置关系,第1、第2等同样如此。
37.第1连杆l1的前端是把持工件w的把持部g,第1连杆l1的另一端与第2连杆l2的一端连结。该连结经由第一关节轴j1而进行。同样地,在各连杆l设置有关节轴j,各连杆l相对于关节轴j转动自如地连结。
38.在第2连杆l2的另一端设置有连结第21连杆l21与第31连杆l31的一端的第二关节轴j2、以及连结第22连杆l22与第32连杆l32的第三关节轴j3。作为从指的前端起第三个关节的第31连杆l31以及第32连杆l32成为留有旋转自由度的结构,因此即使手h的控制相同,也能够把持不同形状、尺寸的工件w。
39.相对于其他连杆l大概呈长方形状,第4连杆l4大概呈三角形状,并在三角形状的各顶点附近设置有关节轴j。三个关节轴j是与第31连杆l31的另一端连接的第四关节轴j4、与第32连杆l32的另一端连接的第五关节轴j5以及与第5连杆l5的一端连接的第六关节轴j6。第5连杆l5的另一端与在后述的保持部15的两端设置的第七关节轴j7连接。在本实施方式中,第二手h2也具备与第一手h1相同的结构,因此省略说明。
40.第一手h1和第二手h2分别在第1连杆l1的前端具备把持部g。另外,在图2中例示了作为作业对象物的工件w。在图2的例子中,呈长方体形状的工件w实际上具有各种大小、形状、硬度、重量。通过第一手h1和第二手h2分别具备的两个把持部g将工件w夹入,而把持工件w。
41.可动部10移动自如地安装于固定在机械臂1的基台11,手h因可动部10的动作而变形。可动部10通过经由例如马达、齿轮等而被控制的致动器驱动,致动器例如为电动式、液压式、气压式等。另外,对工件w进行把持的把持部g设置于手h的前端,使手h变形的可动部10处于连接于手h的与前端相反的一侧的端部的位置关系,同时致动器也配置于手h的与前端相反的一侧的端部。
42.另外,可动部10具有可动轴x,且具备:基台11;移动部12,其沿着可动轴x移动;支承部13,其固定于移动部12并与移动部12的动作连动;支承轴14,其使移动部12的动作稳定;以及保持部15,其固定于支承轴14的前端。另外,移动部12和保持部15经由弹性部16而被弹性地施力。并且,在与可动轴x正交地配置的支承部13的两前端分别固定有弹簧20,弹簧20的另一端固定于将第1连杆l1与第2连杆l2连接的第一关节轴j1,从而第一手h1以及第二手h2被可动部10弹性地施力。另外,在基台11的前端设置有限位器17。需要说明的是,移动部12也可以是致动器。
43.(控制系统的结构)
44.图5是示出控制系统100的硬件结构的一例的框图。控制系统100控制机械臂1以及末端执行器2的动作。
45.本例中的控制系统100是包括处理器101、存储器102、输入装置103、图像取得部104、末端执行器连接部105、通信装置106、以及输入输出接口107的结构。存储器102、输入装置103、图像取得部104、末端执行器连接部105、通信装置106、输入输出接口107以分别能够与处理器101之间进行数据或信息的输入输出的方式通过内部总线等而连接。
46.处理器101例如使用cpu(central processing unit)、mpu(micro processing unit)、dsp(digital signal processor)、或者fpga(field programmable gate array)而构成。处理器101作为控制系统100的控制部而发挥功能,并进行用于将控制系统100的各部的动作整合的控制处理、与控制系统100的各部之间的数据或信息的输入输出处理、数据的计算处理、以及数据或信息的存储处理。另外,处理器101也作为控制末端执行器2的控制部而发挥功能。
47.存储器102可包括hdd、rom、ram等,且保存有由处理器101执行的各种程序(os、应用软件等)、各种数据。
48.输入装置103可包括键盘、鼠标等,并且具有作为与用户之间的人机接口的功能,且输入用户的操作。换言之,输入装置103用于由控制系统100执行的各种处理中的输入或者指示。需要说明的是,输入装置103也可以是与控制器4连接的编程器。
49.图像取得部104能够经由有线或者无线而与相机cam连接,并取得相机cam拍摄到的图像。控制系统100能够对图像取得部104取得的图像适当进行图像处理。该图像处理的主体可以是处理器101。另外,控制系统100可以还具备省略图示的图像处理单元,也可以是该图像处理单元与控制系统100连接的结构。在由处理器101进行的控制下,能够利用该图像处理单元进行图像处理。
50.末端执行器连接部105是确保与可以作为本公开的机械手的末端执行器2的连接的构成要素,控制系统100与末端执行器2(以及机械臂1)经由末端执行器连接部105而连接。该连接可以是使用了连接器以及线缆等的有线连接,但也可以是利用无线的连接。在该连接时,末端执行器连接部105从末端执行器2取得识别末端执行器2的识别信息。即,末端执行器连接部105作为识别信息取得部而发挥功能。需要说明的是,处理器101也可以从末端执行器连接部105进一步取得识别信息。利用该识别信息能够确定所连接的末端执行器2的种类。
51.通信装置106是用于经由网络而与外部进行通信的构成要素。需要说明的是,该通信可以是有线通信,也可以是无线通信。
52.输入输出接口107具有作为与控制系统100之间进行数据或信息的输入输出的接口的功能。
53.需要说明的是,控制系统100的上述结构为一例,也可以不一定具备上述的全部构成要素。另外,控制系统100也可以还具备追加的构成要素。例如,箱型的控制系统100(控制器4)也可以具有车轮,并使机械臂1以及末端执行器2载置于控制系统100之上而自动行驶。
54.(机械手的动作)
55.接下来,基于图6至图9对可以作为本公开的机械手的末端执行器2把持工件w的动作进行说明。
56.(初始状态:参照图6)
57.为了进行作业而使末端执行器2接近工件w。进行利用相机cam的拍摄,控制系统100基于由图像取得部104取得的图像来控制与工件w相匹配的末端执行器2的变形。该控制也可以包括上述的致动器的控制。在该时间点,保持部15不与基台11的限位器17抵接,两者之间处于分开距离的状态。
58.(把持移行动作状态:参照图7)
59.使可动部10的移动部12沿着可动轴x向相对于工件w分离的方向(d方向)移动。该移动可以利用致动器进行。伴随着移动部12的移动,支承部13以及保持部15向所述d方向移动。追随于保持部15的移动,在保持部15的两端设置的第七关节轴j7向基台11侧接近,第六关节轴j6向手h的内侧移动。该移动使以第五关节轴j5为中心的第4连杆l4产生转动,第四关节轴j4向末端执行器2的内侧方向移动,并且第2连杆l2以第三关节轴j3为中心转动。
60.在初始状态(参照图6)下,第2连杆l2被定位为相对于可动轴x扩展的
“ハ”
字状,但通过第2连杆l2的转动向相对于可动轴x大致平行的位置移动(参照图7)。借助第2连杆l2的转动,第1连杆l1以第一关节轴j1为中心旋转,第1连杆l1的把持部g朝向工件w的方向,另外把持部g向工件w靠近。需要说明的是,由于使可动部10的移动部12沿着可动轴x向相对于工件w分离的方向(d方向)移动,因此弹簧20的弹性力变强。在图7的状态下,虽然保持部15与基台11的限位器17之间的距离缩小,但保持部15尚未与限位器17抵接。
61.当使移动部12向所述d方向进一步移动时,第4连杆l4的旋转更加进展,第2连杆l2的旋转也进展,第21连杆l21向第1连杆l1的按压和第一关节轴j1处的旋转变大,第1连杆l1的把持部g更加接近工件w。弹簧20对可动部10和手h始终弹性地施力,从而能够抑制伴随着连杆l的转动的机械的误差、吸收相对于振动的位移。特别是,在本例中,弹簧20与第一关节轴j1以及可动部10的支承部13连结,使第1连杆l1的动作稳定,在要求把持位置的精度的作业中,也能够进行适当的工件w的把持。
62.(把持状态:参照图8)
63.如图8所示,移动部12向所述d方向移动的量增加,可以在保持部15与基台11的限位器17抵接的时机,使把持部g把持工件w。但是,也可以在保持部15未与基台11的限位器17抵接的期间,使把持部g把持工件w。
64.将保持部15与基台11的限位器17抵接的状态下的、可动部10(的移动部12)从初始状态(参照图6)起动作的动作量定义为可动部10的动作量为规定值。在从初始状态(参照图6)到保持部15与基台11的限位器17抵接(参照图8)为止的期间,可动部10的动作量小于规定值,在该期间手h持续变形。
65.当保持部15与基台11的限位器17抵接时(当可动部10的动作量成为规定值时),保持部15向d方向的进一步的移动被限位器17妨碍。因此,追随于保持部15的移动而产生的第4连杆l4的转动等停止。因此,手h的变形停止。但是,如后述那样,第1连杆l1的倾斜具有自由度,因此变形停止的是手h的至少一部分。即,在可动部10的动作量成为所述规定值时,在限位器17的作用下,手h的至少一部分的变形停止。
66.在可动部10的动作量为规定值以上的情况下、也就是可动部10的移动部12向所述d方向进一步动作了的情况下,保持部15被限位器17妨碍而不能进一步移动,因此手h(的至少一部分)的变形成为停止的状态。并且,弹簧20进一步拉伸。即,弹簧20的弹性力发生变化。图9示出了由该弹性力的变化引起的把持力的变化。
67.(把持力控制状态:参照图9)
68.使可动部10的移动部12向所述d方向进一步移动。这样,伴随着移动部12的移动,弹簧20的弹性力增加。当弹簧20的弹性力增加时,弹簧20更强力地拉拽第一关节轴j1,由此把持部g向图9所示的y方向以更强力地按压的方式把持工件w。即,当弹簧20的弹性力增加时,手h的把持力增加。
69.这样,在可动部10的动作量小于规定值时,能够通过使可动部10(的移动部12)动作而控制手h的变形。另一方面,在可动部10的动作量为规定值以上时,能够通过使可动部10(的移动部12)动作而控制把持部g的把持力。
70.基于本实施方式对可动部10的动作进行了说明,但可以以牵拉可动部10的形式,也可以以扭转可动部10的形式使手h变形。即,只要能够使手h与可动部10的动作相应地发生变形,则也可以是牵拉可动部10以外的结构。需要说明的是,可动部10的动作量可以是表示移动量的值,在为扭转可动部10的形式的情况下,相当于在扭转方向上动作的动作量。
71.并不限于上述的弹簧20,通过利用弹性体的弹性力来调整把持部g的把持力,也可以不在手h的前端附近(例如第一关节轴j1)设置致动器。其结果是,能够提供削减使用致动器的数量,低成本且轻型,并且也不存在配线的繁杂的机械手。另外,若是本公开的机械手,则手h只要具备一个用于使移动部12移动的致动器,就能够适当进行把持力的调整。
72.需要说明的是,在把持部g把持工件w时,不限于作为多个手的第一手h1以及第二手h2均等地进行把持。如图10所示,第一手h1的第1连杆l1用把持部g的前端进行把持,但第二手h2的第1连杆l1用把持部g的侧面进行把持。在这样的情形下,也能够通过弹簧20的弹性力的调整而以适当的把持力对工件w进行把持。
73.另外,第1连杆l1的倾斜存在自由度,如图11所示,把持工件w的状态各种各样。如图11的(a)那样大致垂直地把持工件w的侧面,如图11的(b)那样从相对于工件w的侧面略倾斜的方向进行把持,如图11的(c)那样一方用把持部g的前端且一方用把持部g的侧面来把持工件w的侧面等。这样,通过使第1连杆l1的倾斜具有自由度,能够以适当的把持力对具有各种形状、大小、硬度等的工件w进行把持。
74.(基于拍摄图像的把持力的调节)
75.如上述那样,本公开的手h能够使用弹簧20等弹性体来调整把持部g的把持力。对于该弹性力的调整,可以由控制系统100的图像取得部104取得相机cam拍摄到的图像而基于所取得的图像来进行。经由图像取得部104而取得上述图像的处理器101基于映入图像的末端执行器2、工件w的形状来导出把持部g的适当的把持力,并经由末端执行器连接部105
来控制末端执行器2(手h)。该控制中也包括用于使移动部12移动的所述致动器的控制。即,控制系统100能够基于由相机cam拍摄的拍摄图像来控制把持部g的把持力。
76.(较大的工件的把持:参照图12以及图13)
77.在图12以及图13中示出在把持较大的工件的情况下的、本公开的末端执行器2(机械手)的实施例。图12的(a)示出初始状态,图12的(b)示出把持状态(末端执行器2与工件w接触了的状态),图13的(a)示出把持力控制完成状态。在图中,用粗的虚线表示基准位置,箭头a表示与手h整体的动作连动的保持部15的动作。箭头b表示可动部10的动作,箭头c表示弹性部16的动作。箭头d表示从弹性部16与移动部12的接点到支承部13的距离,该距离恒定。
78.在保持部15与基台11的限位器17抵接之前,把持部g把持工件w(图12的(b))。图13的(b)的曲线图示出该情况下的手h整体的动作(箭头a)、可动部10的动作(箭头b)、弹性部16的动作(箭头c)。在图13的(b)的曲线图中,横轴表示经过时间,纵轴表示箭头a、b、c各自的从起点到终点的距离(箭头的长度)。
79.在图13的(b)的[1]的时间点,若可动部10向箭头b的方向驱动而箭头b的长度变长,则与手h整体连动的保持部15向箭头a的方向动作,箭头a的长度变短。弹性部16在该时间点没有被拉拽,因此箭头c的长度保持恒定。
[0080]
在图13的(b)的[2]的时间点,若把持部g以把持的方式接触工件w,则与手h整体的动作连动的保持部15的动作在此停止,不与限位器17抵接。也就是,箭头a的长度以后变为恒定。另一方面,可动部10向箭头b的方向驱动从而箭头b的长度变长,弹性部16开始被拉拽从而箭头c的长度变长。需要说明的是,如在图13的(b)的曲线图中一并示出的那样,由把持部g施加的工件w的把持力也增大。这是因为,随着箭头b的长度变长,弹簧20的弹性力增大。
[0081]
在图13的(b)的[3]的时间点,与手h整体的动作连动的保持部15的动作也保持停止,箭头a的长度恒定。另一方面,可动部10向箭头b的方向驱动从而箭头b的长度进一步变长,弹性部16被拉拽从而箭头c的长度变长。需要说明的是,如在图13的(b)的曲线图中一并示出的那样,由把持部g施加的工件w的把持力也增大。
[0082]
(较小的工件的把持:参照图14)
[0083]
在图14中示出把持较小的工件的情况下的、本公开的末端执行器2(机械手)的实施例。图14的(a)示出把持力控制完成状态。在图中,用粗的虚线表示基准位置,箭头a表示与手h整体的动作连动的保持部15的动作。箭头b表示可动部10的动作,箭头c表示弹性部16的动作。
[0084]
在该实施例中,保持部15与基台11的限位器17抵接,从而手h的动作(箭头a)停止。图14的(b)的曲线图示出该情况下的手h整体的动作(箭头a)、可动部10的动作(箭头b)、弹性部16的动作(箭头c)。在图14的(b)的曲线图中,横轴表示经过时间,纵轴表示箭头a、b、c各自的从起点到终点的距离(箭头的长度)。
[0085]
图14的(b)的[1]的时间点的曲线图上的状态与图13的(b)的[1]的时间点的曲线图上的状态相同。若可动部10向箭头b的方向驱动而箭头b的长度变长,则与手h整体连动的保持部15向箭头a的方向动作,箭头a的长度变短。弹性部16在该时间点没有被拉拽,因此箭头c的长度保持恒定。
[0086]
图14的(b)的[2]的时间点与图13的(b)的[2]的时间点不同,保持部15与限位器17
抵接。若保持部15与限位器17抵接,则与手h整体的动作连动的保持部15的动作在此停止。也就是,箭头a的长度以后变为恒定。另一方面,可动部10向箭头b的方向驱动从而箭头b的长度变长,弹性部16开始被拉拽,因此箭头c的长度变长。需要说明的是,如在图14的(b)的曲线图中一并示出的那样,由把持部g施加的工件w的把持力也增大。
[0087]
在图14的(b)的[3]的时间点,与手h整体的动作连动的保持部15的动作也在限位器17的作用下保持停止,箭头a的长度变为恒定。另一方面,可动部10向箭头b的方向驱动从而箭头b的长度进一步变长,弹性部16被拉拽从而箭头c的长度变长。需要说明的是,如在图14的(b)的曲线图中一并示出的那样,由把持部g施加的工件w的把持力也增大。
[0088]
需要说明的是,在与限位器17接触的状态下,考虑手h的例如前端、工件w发生变形的情况。在图14的(b)的[1]的时间点,可能存在在把持部g与工件w接触后,由于手h或者工件w的变形,箭头a的长度进一步变短的情况。在该情况下,箭头a的长度因移动到“与限位器接触的状态”为止而变短,成为图14的(b)的[2]的状态。
[0089]
如图12~图14所示的两个实施例那样,保持部15与工件w或者限位器17接触,由此保持部15的动作停止。保持部15与手h整体连动,因此手h整体的动作由于保持部15的动作停止而停止。但是,在作为把持对象的工件w柔软的情况下,有时与由把持部g施加的工件w的把持力的变化相应地,保持部15的位置不发生变化而手h的前端的形状发生变化。
[0090]
另外,可动部10(箭头b)能够与限位器17、工件w的形状无关地移动,因此始终以恒定量持续动作。弹性部16(箭头c)在保持部15动作的期间与可动部10连动地动作,因此箭头c的长度不发生变化。另一方面,在保持部15与工件w或者限位器17接触而停止后,箭头c的长度与可动部10的动作相应地变大。在图示的例子中,弹性部16的弹簧被拉拽。
[0091]
如以上那样,在手h与工件w接触了的情况下,在手h的至少一部分的变形停止了的状态下,弹性体(弹簧20)的弹性力发生变化。由此,在手h与工件w接触后,能够利用弹性体来调整把持部g的把持力。
[0092]
另外,机械手还具备限位器17,在可动部10的动作量成为规定值时,在限位器17的作用下,手h的至少一部分的变形停止。由此,在可动部10的动作量为规定值以上时,能够抑制手h的变形并且调整把持部g的把持力。
[0093]
另外,机械手还具备致动器,弹性体为弹簧20,弹簧20将手h的第一关节轴j1与可动部10连结,致动器使可动部10动作。由此,能够利用控制系统100的控制使可动部10动作而调整弹性力。
[0094]
另外,机械手可以仅具备一个致动器。由此,能够进行把持力的调整并且减少致动器的数量。其结果是,成本能够降低,配线的工时被削减,维护变得容易,并且能够实现轻型化。
[0095]
另外,可动部10连接于手h的与前端相反的一侧的端部,致动器配置于手h的与前端相反的一侧的端部。由此,能够利用致动器使可动部10向远离手h的前端的方向动作,从而顺畅地控制手h的变形和把持部g的把持力。
[0096]
另外,第一关节轴j1不具备致动器。由此,能够削减机械手的前端部分的重量,另外,配线的工时被削减。
[0097]
以上,参照附图对本公开的机械手的各种实施方式进行了说明,但本公开当然并不限定于该例子。只要是本领域技术人员,就显然能够在技术方案所记载的范围内想到各
种变更例、修正例、置换例、附加例、删减例、等同例,并理解这些当然也属于本公开的技术的范围。另外,在不脱离发明的主旨的范围内,也可以将上述的各种实施方式中的各构成要素任意地组合。
[0098]
工业实用性
[0099]
本公开作为能够把持工件的机械手是有用的。
[0100]
附图标记说明:
[0101]
1 机械臂
[0102]
2 末端执行器
[0103]
4 控制器
[0104]
10 可动部
[0105]
11 基台
[0106]
12 移动部
[0107]
13 支承部
[0108]
14 支承轴
[0109]
15 保持部
[0110]
16 弹性部
[0111]
17 限位器
[0112]
20 弹簧(弹性体)
[0113]
100 控制系统
[0114]
101 处理器
[0115]
102 存储器
[0116]
103 输入装置
[0117]
104 图像取得部
[0118]
105 末端执行器连接部
[0119]
106 通信装置
[0120]
107 输入输出接口
[0121]
cam 相机
[0122]
g 把持部
[0123]
h 手
[0124]
h1 第一手
[0125]
h2 第二手
[0126]
j 关节轴
[0127]
j1 第一关节轴
[0128]
j2 第二关节轴
[0129]
j3 第三关节轴
[0130]
j4 第四关节轴
[0131]
j5 第五关节轴
[0132]
j6 第六关节轴
[0133]
j7 第七关节轴
[0134]
l 连杆
[0135]
l1 第1连杆
[0136]
l2 第2连杆
[0137]
l21 第21连杆
[0138]
l22 第22连杆
[0139]
l3 第3连杆
[0140]
l31 第31连杆
[0141]
l32 第32连杆
[0142]
l4 第4连杆
[0143]
l5 第5连杆
[0144]
w 工件
[0145]
x 可动轴。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。