1.本发明首先涉及一种根据权利要求1的前序部分的特征所述的用于控制车辆、尤其是机动车的传动机构的驻车锁止器的挂入和/或摘出的方法。
2.本发明还涉及一种根据权利要求6的前序部分的特征所述的用于控制车辆、尤其是机动车的传动机构的驻车锁止器的挂入和/或摘出的方法。
背景技术:
3.在现有技术中已知多种用于控制车辆、尤其是机动车的传动机构的驻车锁止器的挂入和/或摘出的方法。
4.相应的机动车通常具有驻车锁止器、驻车制动器和控制设备,其中,驻车锁止器尤其借助至少一个可激活的驻车锁止致动器能够在传动机构中、尤其在自动传动机构中有效地挂入和/或摘出。通过在传动机构中有效地挂入驻车锁止器,车辆于是能够防止无意的滚动和/或防止无意的继续行驶,尤其是当在传动机构中挂入空挡(n)时。希望保护车辆以防无意的滚动和/或以防无意的继续行驶的驾驶员于是可以手动操纵用于激活驻车锁止的装置,尤其是操纵驻车锁止按键和/或换档杆,尤其是按压/操纵存在于换档杆上的驻车锁止按键或者使换档杆运动到相应的停车位置“p”中。
5.此外,相应的车辆、尤其是机动车还具有至少一个用于激活驻车制动器的装置、尤其是至少一个驻车制动器按键,即所谓的“epb按键”。如果用于激活驻车制动器的装置、尤其是驻车制动器按键(epb按键)由驾驶员操纵/激活,则驻车制动器被拉紧或实现车辆的驻车制动器功能。
6.此外,在现有技术中已知的机动车具有相应的控制设备、尤其是也用于控制驻车锁止器在传动机构中的有效挂入和摘出。将车辆的相应的行驶参数输送给控制设备。尤其将当前的确定的至少一个第一行驶参数输送给控制设备,和/或由控制设备借助相应的传感器确定和/或计算该第一行驶参数。但是,优选地将确定的多个行驶参数输送给控制设备和/或由控制设备当前确定和/或计算多个行驶参数,例如车辆速度、车辆加速度、车道倾斜度或车道坡度和/或车辆的纵向倾斜度,车辆的装载状态,相应按键的手动操纵(激活/停用),行驶踏板和/或制动踏板(或类似物)的操纵。
7.在de 10 2004 047 100 b3中描述了一种用于控制在机动车的传动机构中挂入和/或摘出驻车锁止器的方法,其中,确定车辆的当前的车辆速度作为确定的第一行驶参数,其中,当驾驶员操纵用于激活驻车锁止器的装置并且当前的车辆速度于是大于零时,在随后有效地在传动机构中挂入驻车锁止器之前,车辆才进一步借助驻车制动器进一步制动。因此,在在现有技术中已经已知的方法中,在有效挂入驻车锁止器之前就在传动机构中使用驻车制动器或者由电子控制单元至少长时间地激活驻车制动器,直至确定低于车辆速度阈值或者尤其是车辆的静止状态。换言之,在将驻车锁止器有效地挂入传动机构中之前,借助驻车制动器进一步制动车辆。
8.然而,在现有技术中已知的方法或通过该方法运行的机动车尚未被最佳地构造。
9.当车辆“滚入到”锁止机构(棘轮)中时,可自由运动的或可滚动的车辆的尤其是电操控的驻车锁止器的有效挂入可能导致驻车锁止机构的损坏。附加地,锁止元件(棘轮)可以张紧,这在下一次松开时或者在有效摘出驻车锁止器时于是需要更高的力的耗费并且可能导致不舒适的悬臂抽动(auslegeruck)。
10.在现有技术中已知的方法(本发明从该方法出发(de 10 200 4047 100 b3))中,在有效地在传动机构中挂入驻车锁止器之前,车辆才进一步制动,即车辆速度进一步降低或减小,即借助激活的驻车制动器(或锁定制动器)。尽管如此可行的是,在在此描述的方法中,如果车辆还没有达到其静止状态,但是已经低于在此预先给定的车辆速度阈值,则如果车辆在倾斜的车道上,则车辆“滚入”到已经有效挂入的驻车锁止器中。如果在传动机构中有效挂入驻车制动器并且为了驾驶员起动而手动地停用了驻车制动器,则车辆由于车道的倾斜于是可以“滚入”还有效挂入的驻车制动器中,这可能导致上面已经描述的问题。因此,在现有技术中已知的方法尚未被最佳地构造。
技术实现要素:
11.因此,本发明要解决的技术问题是,设计和改进开头所述的方法,使得一方面提高驾驶员的驾驶舒适性和/或另一方面降低驻车锁止器的损坏和/或磨损的风险。
12.对于该方法,上述技术问题首先通过权利要求1的特征来解决。
13.对于该方法,上述技术问题还通过权利要求6的特征来解决。
14.上述权利要求的特征可以单独地实施和/或实现,但也可以相应地组合地一起实施和/或实现。在此可能已经指出了这点。
15.根据第一优选实施方式,确定和/或计算车道的当前的斜度和/或车辆的纵向倾斜度作为第二行驶参数,其中,基于确定的斜度值和/或确定的车辆的纵向倾斜度值来决定和/或检查,车辆的液压制动系统是否被激活。换言之,在所述方法的第一优选的实施方式中,在在传动机构中有效自动地挂入驻车锁止器之前激活车辆的液压制动系统。这确保了,当车辆在倾斜的车道上或具有相应的纵向倾斜度时,防止车辆滚入驻车锁止器中。
16.尤其对于车辆速度基本上为零和/或车辆处于静止状态并且确定的斜度值和/或倾斜度值的绝对值低于确定的第一倾斜度边界值的绝对值的情况,于是自动地激活液压制动系统,尤其是激活最多2秒。此后,在传动机构中自动地挂入驻车锁止器。这具有的优点是,在车道倾斜度或车辆的纵向倾斜度尤其小的情况下,借助液压制动系统来保护车辆。在激活液压制动系统之后,在传动机构中或传动机构上自动有效地挂入驻车锁止器。
17.在有效挂入驻车锁止器之后,液压制动系统又自动停用。于是,通过有效地挂入的驻车锁止器来保护车辆以防滚动。特别地,不必自动激活驻车制动器以进一步保护车辆以防滚动。
18.在第一优选实施方式的上述方法中,对于车辆速度基本上为零和/或车辆处于静止状态并且确定的斜度值和/或倾斜度值的绝对值超过确定的第一倾斜度边界值的绝对值的情况,自动地激活驻车制动器。这尤其用于进一步保护车辆以防无意的滚动,或者于是也可以执行根据另外的第二实施方式的另外的根据本发明的方法,在下文中还能够详细阐述这点。
19.在根据本发明的方法的另外优选的第二实施方式中,(同样如在根据本发明的方法的第一实施方式中那样)确定和/或计算车道的当前的斜度和/或车辆的纵向倾斜度作为第二行驶参数,其中,基于确定的斜度值和/或确定的车辆的纵向倾斜度值来决定和/或检查,已经激活的驻车制动器是否能够由驾驶员再次停用,尤其能够再次手动停用。
20.因此,在所述方法的第二优选的实施方式中,首先自动地激活驻车制动器,尤其是以便在在传动机构中有效地挂入驻车锁止器之前也可能进一步将车辆制动到静止状态中。如果车辆随后达到静止状态或车辆速度基本上为零,则在传动机构中有效地挂入驻车锁止器。
21.对于如下情况,即驻车制动器已经被激活、尤其是自动激活和/或车辆处于静止状态并且驻车锁止器被有效挂入,并且然后确定的斜度值和/或倾斜度值的绝对值低于确定的第二倾斜度边界值的绝对值,随时允许和/或能够实现通过驾驶员松开和/或停用驻车制动器。
22.不同地,对于如下情况,即驻车制动器已经被激活、尤其自动地激活和/或车辆处于静止状态中并且驻车锁止器被有效挂入,并且确定的斜度值和/或倾斜度值的绝对值超过确定的第二倾斜度边界值的绝对值,因为至少只要在传动机构中有效挂入驻车锁止器,就自动地不允许或阻止驾驶员松开和/或停用驻车制动器。这尤其在车辆处于强烈倾斜的车道上时是有利的,因为此时驾驶员对于这种情况恰好不能停用驻车制动器,从而防止已经挂入传动机构中的驻车锁止器滚入和/或张紧。
23.特别地,只有在传动机构中或传动机构上有效地摘出驻车锁止器时,驾驶员才能够停用驻车制动器。这防止在车道的强烈的下坡/上坡时滚入驻车锁止器中。
24.还可以想到,当如上面所描述的那样,驾驶员随时被允许和/或能够实现松开和/或停用驻车制动器时,即当确定的斜度值的绝对值低于确定的第二倾斜度边界值的绝对值时,也自动地与停用驻车制动器一起同样有效地摘出驻车锁止器、尤其在停用驻车制动器不久前或者至少同时地有效地摘出驻车锁止器。
25.如上面已经描述的那样,两个优选的实施方式可以分别单独地实现,但也可以共同地组合地实现,尤其然后在相应实现的优选的第三实施方式内,即在权利要求1和6的特征的组合中。在此指出了这一点。
26.此外,根据本发明的方法现在全部可以通过如下方式来设计,即当驾驶员在在传动机构中力锁合地有效挂入的挡位的情况下操纵加速踏板时,自动地摘出有效挂入的驻车锁止器。
27.还可以想到,为了制动车辆直至车辆的静止状态、尤其是低于确定的车辆速度边界值,也激活液压制动系统。
28.相应的确定的车辆速度边界值尤其为3km/h,低于该车辆速度边界值尤其自动地激活驻车制动器,以便进一步制动车辆。
29.上述的确定的第一斜度边界值和/或倾斜度边界值尤其相应于5%的车道斜度(或相应的车道坡度)和/或上述的确定的第二斜度边界值和/或倾斜度边界值相应于15%的车道斜度(或相应的车道坡度)。
30.最后可以想到,在停用驻车锁止器时、尤其在相应地操纵驻车锁止按键时、尤其即在有效地摘出驻车锁止器时,激活的驻车制动器同样同时自动地一起停用。
31.在任何情况下,当在车辆、尤其是机动车中实现相应的之前描述的方法时,相应地避免了开头提到的缺点和/或实现了特定的优点。
附图说明
32.存在多种可能性,以有利的方式设计和改进根据本发明的方法或根据本发明的车辆。为此,首先可以参考从属于权利要求1或权利要求6的权利要求。下面可以参照附图和所属的描述来详细阐述本发明的优选的实施方式。附图中:
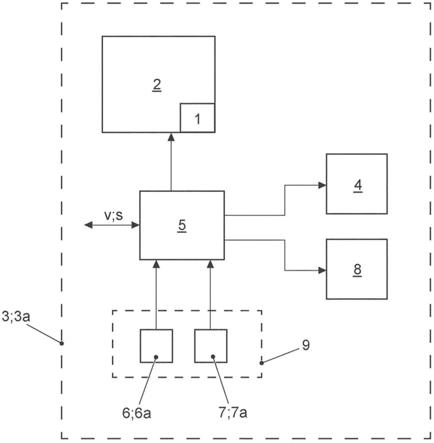
33.图1以示意图示出了用于执行根据本发明的用于车辆、尤其用于机动车的方法的主要部件,并且
34.图2以示意图示出了用于执行根据第一优选实施方式的根据本发明的方法的电路图,在图2中通过路径i示出;或者用于执行根据第二优选实施方式的根据本发明的方法的电路图,在图2右侧通过路径ii示出,其中,该第一和第二优选实施方式可以彼此组合地实施,尤其也根据下面对优选的第三实施方式的描述(图2的整体视图,即路径i和路径ii的组合)。
具体实施方式
35.图1首先示出了用于实现根据本发明的方法的主要部件,该方法用于控制仅通过虚线表示的车辆3、尤其是机动车3a的传动机构2的驻车锁止器1的挂入和/或摘出。
36.车辆3或机动车3a具有驻车锁止器1和传动机构2。特别地,驻车锁止器1至少部分地布置在传动机构2内。此外,车辆3或机动车3a具有驻车制动器4和控制设备5。在传动机构2中、尤其在此在自动的传动机构2a中,可以借助至少一个可激活的驻车锁止致动器(在此未详细示出)有效地挂入或摘出驻车锁止器1,尤其当传动机构2处于空挡位置“n”中时。在此,驻车锁止器1能够有效地挂入传动机构2中和/或传动机构2上,尤其这意味着,驻车锁止器1和/或为此所需的机械部件至少部分地相应地布置在传动机构2中和/或传动机构2上或传动机构2的区域中。
37.为了确定驾驶员意愿,即车辆3要防止无意的滚动和/或防止无意的继续行驶的驾驶员意愿,车辆3具有至少一个用于激活驻车锁止器1的装置6、尤其是驻车锁止按键6a和/或用于未示出的换档杆(位置“p”)的确定的定位可能性,以及至少一个用于激活驻车制动器4的装置7、尤其是至少一个驻车制动器按键7a(epb按键)。装置6、尤其是驻车锁止按键6a和/或装置7、尤其是驻车制动按键7a可以由驾驶员尤其是在乘客车厢中手动操纵、尤其是按压。
38.借助控制设备5控制、尤其是自动控制对驻车锁止器1在传动机构2中的有效挂入和摘出的控制。在此,尤其将多个行驶参数输送给控制设备5和/或由控制设备5当前地确定多个行驶参数(v,s)。至少将至少一个当前的确定的行驶参数(v)输送给控制设备和/或由控制设备5进行确定,其中,确定车辆的当前的车辆速度v作为确定的第一行驶参数。控制设备5尤其是持续地/连续地确定车辆速度v,但至少当驾驶员希望保护车辆3以防滚动和/或以防继续行驶时,即至少当驾驶员操纵装置6、尤其是用于激活驻车锁止器1的驻车锁止按键6a时,即希望将驻车锁止器1挂入传动机构2中时,确定车辆速度v。
39.但是,只有当车辆3处于静止状态和/或当前的车辆速度v基本上为零时,驻车锁止
器1才被有效地挂入传动机构2中和/或传动机构上。这基本上适用于所述方法的所有优选的实施方式,在此指出了这一点。术语“基本上为零”意味着,非常小的车辆速度,例如小于等于0.05km/h和/或在该范围内的相应的测量精确性还应被术语“基本上为零”一并包括。
40.下面首先描述根据本发明的方法的第一优选实施方式,然后描述根据本发明的方法的第二优选实施方式。在此,第一优选的实施方式基本上通过图2中的路径i示出。第二优选实施方式通过在图2中右侧的路径ii示出,其中,这两个优选的实施方式可以彼此相应地组合成第三优选的实施方式,如已经提到的那样。
41.然而,优选的实施方式或相应的根据本发明的方法基本上首先也共同的是,如在图2中所示的那样,驾驶员首先在方法开始时(在此通过附图标记“10”示出)操纵装置6、尤其是驻车锁止按键6a,因为驾驶员希望保护车辆3以防滚动和/或以防继续行驶,尤其是因为驾驶员希望有效地将驻车锁止器1挂入传动机构2中(在图2中最上方示出)。
42.在第一方法步骤11中,然后确定当前的车辆速度v和/或检查当前的车辆速度v。然而,当车辆3处于静止状态和/或当前的车辆速度v基本上为零时,在传动机构2中和/或在传动机构2上才有效地挂入驻车锁止器1,这又基本上是所有方法共同的。如果车辆3还没有达到其静止状态或者当前的车辆速度v超过确定的车辆速度边界值、尤其是车辆速度v大于3km/h,则借助控制设备5自动地阻止在传动机构2中和/或传动机构上有效地挂入驻车锁止器1,尽管驾驶员已经操纵装置6、尤其是驻车锁止按键6a。这在图2中通过那里的方法步骤12示出。不进行驻车锁止器1的有效挂入。如果车辆3还没有达到其静止状态并且当前的车辆速度v低于确定的车辆速度边界值、尤其是3km/h,则车辆3才能够继续借助然后自动激活的驻车制动器4制动直至达到静止状态和/或直至其车辆速度v基本上达到零(后者尤其在图2中的路径ii的开始处通过方法步骤13示出,尤其是当车辆速度v小于等于3km/h时,通过然后自动激活的驻车制动器4继续制动车辆3)。或者后者,又换而言之,只有当车辆3以其车辆速度v达到或低于确定的车辆速度边界值、尤其是达到或低于3km/h时,车辆3才能够借助自动激活的驻车制动器4制动直至静止状态和/或直至车辆速度v基本上为零,如通过方法步骤13所示。
43.在下文中,可以更详细地描述根据本发明的方法的各个优选实施方式:
44.开头提到的缺点首先在所述方法的第一优选的实施方式中通过如下方式避免,即确定和/或计算车道的当前的斜度s和/或车辆3的纵向倾斜度作为第二行驶参数,并且基于确定的、尤其当前的斜度值s
x
和/或确定的车辆3的纵向倾斜度值来决定和/或检查,车辆3的液压制动系统8是否被激活。该方法的优选的第一实施方式在图2左侧,即路径i中示出。对于车辆速度v基本上为零和/或车辆3处于静止状态并且确定的斜度值和/或倾斜度值s
x
的绝对值低于确定的第一倾斜度边界值sg1的绝对值或相应于该绝对值的情况,液压制动系统8尤其被自动激活最多2秒。由此,车辆3在静止状态下通过液压制动系统8保护或“固定制动”以防滚动。在该保护之后或者在激活液压制动系统8之后,驻车锁止器1于是自动有效地挂入传动机构2中和/或传动机构2上。在驻车锁止器1有效挂入之后,液压制动系统8再次自动地停用,尤其在上面已经提到的2秒之后。于是,尤其也不自动地激活驻车制动器4以进一步保护车辆3以防滚动,因为车辆3尤其通过有效挂入的驻车锁止器1以防滚动。第一优选的实施方式的上述方法步骤尤其通过图2中左侧的路径i示意性示出。因此,在方法步骤14中检查,确定的斜度值和/或倾斜度值s
x
是否小于或等于确定的第一倾斜度边界值sg1的绝
对值。在满足该条件的情况下,然后在方法步骤15中自动地激活液压制动系统8。此后,在方法步骤16中自动有效地将驻车锁止器1挂入传动机构2中或传动机构2上。在驻车锁止器1有效挂入之后,在方法步骤17中又自动地停用液压制动系统8。因此,当确定的斜度值和/或倾斜度值s
x
的绝对值小于或等于确定的第一倾斜度边界值sg1的绝对值时,尤其是激活液压制动系统8。
45.在要参考本发明的第二优选的实施方式之前或者在要更详细地描述该第二优选的实施方式之前,在此已经可以指出,对于车辆速度v基本上为零和/或车辆3处于静止状态并且确定的斜度值和/或倾斜度值s
x
的绝对值超过确定的第一倾斜度边界值sg1的绝对值的情况,自动激活驻车制动器4,即尤其不自动地激活液压制动系统8并且随后进行在图2中示出的从路径i到路径ii的分支。换言之,如果确定的斜度值和/或倾斜度值s
x
的绝对值大于确定的第一倾斜度边界值sg1的绝对值,则不激活液压制动系统8并且能够激活驻车制动器4。然后可以执行方法步骤13。特别地,该分支在此也至少部分地示出第一和第二优选实施方式的组合。
46.在下文中,可以更详细地描述根据本发明的方法的第二优选的实施方式:
47.在根据本发明的方法的第二优选的实施方式中,首先同样通过驾驶员来操纵装置6或驻车锁止按键6a(参见步骤10),其中,尚未在传动机构2中有效地挂入驻车锁止器1。首先确定车辆速度v(参见方法步骤11)。如果车辆速度v超过确定的车辆速度边界值、尤其是大于3km/h,则自动阻止驻车锁止器1在传动机构2中的有效挂入(参见方法步骤12)。如果车辆速度v低于确定的车辆速度边界值、尤其是小于3km/h,但是其中车辆3还未处于静止状态,则自动激活驻车制动器4,以便进一步制动车辆3。这尤其在图2的路径ii中示出(参见方法步骤13)。如果车辆3达到静止状态或者车辆速度v于是基本上为零,则驻车锁止器1于是自动有效地挂入传动机构2中。这应该通过方法步骤18示出。
48.开头所述的缺点通过所述方法的第二优选的实施方式首先通过如下方式避免,即确定和/或计算车道的当前的斜度s和/或车辆3的纵向倾斜度作为第二行驶参数,并且基于确定的斜度值s
x
和/或确定的车辆3的纵向倾斜度值来决定和/或检查,已经激活的驻车制动器4是否能够由驾驶员再次停用。尤其在较大的斜度和/或较大的车道坡度的情况下,这具有特别的优点,下面可以详细阐述这些优点。
49.对于如下情况,即已经尤其是自动激活了驻车制动器4和/或车辆3处于静止状态并且驻车锁止器1有效地挂入传动机构2中并且确定的斜度值和/或倾斜度值s
x
的绝对值低于确定的第二倾斜度边界值sg2的绝对值或者相应于该绝对值,尤其通过由驾驶员操纵装置7、尤其是驻车制动器按键7a,随时允许和/或实现驻车制动器4的松开和/或停用。这在图2的右下方以图形方式示出,在那里确定的当前的斜度值和/或倾斜度值s
x
的绝对值恰好不大于第二倾斜度边界值sg2,即在此示出的询问被否定,从而当驾驶员相应地操纵装置7、尤其是驻车制动器按键7a时,允许驾驶员借助控制设备5松开驻车制动器4。因此,在方法步骤19中检查,确定的斜度值和/或倾斜度值s
x
是否大于第二斜度边界值sg2。如果该检查/询问被否定,则执行方法步骤20并且借助控制设备5允许由驾驶员松开驻车制动器4,尤其是当驾驶员相应地操纵装置7或驻车制动器按键7a时,特别地,驻车制动器4因此能够相应地被停用。又换而言之,如果确定的斜度值和/或倾斜度值s
x
的绝对值小于或等于确定的第二倾斜度边界值sg2的绝对值,则驾驶员尤其通过操纵驻车制动器按键7a随时允许和/或借助控
制设备5实现驻车制动器4的松开或停用。
50.对于如下情况,即尤其是自动地激活驻车制动器4和/或车辆3处于静止状态中并且驻车锁止器1被有效挂入并且确定的斜度值和/或倾斜度值s
x
的绝对值超过确定的第二倾斜度边界值sg2的绝对值,至少只要驻车锁止器1在传动机构2中被有效挂入,就自动地不允许和/或自动地阻止由驾驶员松开和/或停用驻车制动器4,这在图2中在路径ii中最下方(中间)以图形方式示出或可以通过方法步骤21示出。
51.这导致,当车道的斜度或车辆3的纵向倾斜度相应较大时,在传动机构2中的驻车锁止器1也未被有效摘出之前,驾驶员不能、尤其不能手动地停用驻车制动器4。由此防止滚入到有效挂入的驻车锁止器1中。
52.原则上还可以想到,当在传动机构2中和/或在传动机构2上有效摘出驻车锁止器1时,驾驶员才能够停用驻车制动器4。可以想到,在由驾驶员停用驻车制动器4时,在传动机构2中也自动地同样有效地摘出驻车锁止器、尤其在停用驻车制动器不久前或者至少同时地,尤其是以便防止滚入到有效挂入的驻车锁止器1中。为此,可以设置共同的按键元件9。
53.在路径i和路径ii中分别示出的步骤可以共同实现。图2中左上方的路径i和路径ii之间示出的分支尤其示出了这点,即当确定的斜度值s
x
的绝对值大于确定的第一倾斜度边界值sg1时,可以从路径i“跳转”到路径ii中。
54.一般而言,这涉及根据本发明的方法的所有三个优选的实施方式,当驾驶员在在传动机构2中力锁合地有效挂入的挡位的情况下操纵加速踏板时,可以自动地摘出有效挂入的驻车锁止器1。还可以想到,为了制动车辆3直至车辆3的静止状态,尤其当车辆速度v小于确定的车辆速度边界值,即尤其是小于3km/h时,为此激活液压制动系统8。
55.如上所述,确定的车辆速度边界值尤其为3km/h。还可以想到尤其处于2至5km/h的值之间的其他值。
56.优选地,确定的第一斜度边界值和/或倾斜度边界值sg1相应于5%的车道斜度(或相应的车道坡度)和/或确定的第二斜度边界值和/或倾斜度边界值sg2相应于15%的车道斜度(或相应的车道坡度)。
57.还可以想到,借助控制设备5,在由驾驶员停用驻车锁止器1时,尤其是在相应操纵驻车锁止按键6a时,尤其即在有效摘出驻车锁止器1时同样同时自动地一起停用已经激活的驻车制动器4。在此也指出了这点。
58.结果,通过本发明的第一和第二优选的实施方式,但尤其也通过本发明的、将第一和第二实施方式相互组合的第三优选的实施方式实现了相应的优点并且避免了现有技术中已知的相应的缺点。
59.可以想到,可以指出,装置6和7、按键6a和7a被实施为“软件按键”和/或甚至由驾驶员实现相应的语音控制。
60.附图标记列表
[0061]1ꢀꢀ
驻车锁止器
[0062]2ꢀꢀꢀꢀ
传动机构
[0063]
2a
ꢀꢀꢀ
自动传动机构
[0064]3ꢀꢀꢀꢀ
车辆
[0065]
3a
ꢀꢀꢀ
机动车
[0066]4ꢀꢀꢀꢀ
驻车制动器
[0067]5ꢀꢀꢀꢀ
控制设备
[0068]6ꢀꢀꢀꢀ
用于激活驻车锁止器的装置
[0069]
6a
ꢀꢀꢀ
驻车锁止器按键
[0070]7ꢀꢀꢀꢀ
用于激活驻车制动器的装置
[0071]
7a
ꢀꢀꢀ
驻车制动器按键
[0072]8ꢀꢀꢀꢀ
液压制动系统
[0073]9ꢀꢀꢀꢀ
按键元件
[0074]vꢀꢀꢀꢀ
车辆速度
[0075]sꢀꢀꢀꢀ
车道的斜度/坡度或车辆的纵向倾斜度
[0076]
sg1ꢀꢀ
第一倾斜度边界值
[0077]
sg2ꢀꢀ
第二倾斜度边界值
[0078]sx
ꢀꢀꢀ
确定的斜度值或倾斜度值
[0079]
10
ꢀꢀꢀ
方法的基本开始
[0080]
11
ꢀꢀꢀ
第一方法步骤
[0081]
12
ꢀꢀꢀ
方法步骤
[0082]
13
ꢀꢀꢀ
方法步骤
[0083]
14
ꢀꢀꢀ
方法步骤
[0084]
15
ꢀꢀꢀ
方法步骤
[0085]
16
ꢀꢀꢀ
方法步骤
[0086]
17
ꢀꢀꢀ
方法步骤
[0087]
18
ꢀꢀꢀ
方法步骤
[0088]
19
ꢀꢀꢀ
方法步骤
[0089]
20
ꢀꢀꢀ
方法步骤
[0090]
21
ꢀꢀꢀ
方法步骤
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。