1.本公开涉及混合动力车辆的控制系统及控制方法。
背景技术:
2.检测车辆的当前位置及当前时刻并在当前位置处于有效地域内且当前时刻处于有效期间内时应用特定的控制程序的车载设备控制系统是公知的(例如,参照专利文献1)。在专利文献1的例子中,车辆是具有发动机和电动机的混合动力车辆,有效地域是想要限制混合动力车辆的噪音量、废气量的地域,特定的控制程序是主要使用电动机的动力控制程序。即,在该例子中,在混合动力车辆在有效期间内行驶于有效地域内时发动机的运转被限制,除此以外,发动机的运转被容许。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开平11-115651号公报
技术实现要素:
6.发明所要解决的课题
7.在专利文献1中,若在混合动力车辆正在有效地域内行驶时有效期间到来,则发动机运转被限制,基于发动机运转的发电被限制。其结果,在混合动力车辆在有效地域内行驶的期间,混合动力车辆的蓄电池的soc持续下降,混合动力车辆可能会无法到达例如目的地。换言之,混合动力车辆的蓄电池的soc可能会不足。
8.用于解决课题的手段
9.根据本公开,提供以下方案。
10.[结构1]
[0011]
一种控制系统,是具备内燃机及电动机的混合动力车辆的控制系统,其中,
[0012]
预先设置有限制期间及容许期间预先被设定的变动限制地带,在所述限制期间中的所述变动限制地带内,所述内燃机的运转被限制,在所述容许期间中的所述变动限制地带内,所述内燃机的运转被容许,
[0013]
在判别为所述混合动力车辆位于所述限制期间中的所述变动限制地带内时,限制所述内燃机的运转,并且使所述电动机运转而驱动所述混合动力车辆,
[0014]
在判别为从所述混合动力车辆位于所述变动限制地带外或所述容许期间中的所述变动限制地带内的当前定时到所述混合动力车辆开始位于所述限制期间中的所述变动限制地带内的位置开始定时为止的时间比预先确定的设定时间短时,与判别为从所述当前定时到所述位置开始定时为止的时间比所述设定时间长时相比,增大所述混合动力车辆的蓄电池的soc的上升速度或者减小所述soc的下降速度。
[0015]
[结构2]
[0016]
根据结构1所述的控制系统,以在所述位置开始定时下所述soc成为soc要求值的
方式设定所述设定时间。
[0017]
[结构3]
[0018]
根据结构2所述的控制系统,所述soc要求值是在所述混合动力车辆位于所述限制期间中的所述变动限制地带内后所述soc不低于下限值而所述混合动力车辆移动至能够使所述soc上升的位置所需的soc。
[0019]
[结构4]
[0020]
根据结构1~3中任一项所述的控制系统,在判别为从所述当前定时到所述位置开始定时为止的时间比所述设定时间长时,不执行促进所述soc的上升的soc上升促进控制或限制所述soc的下降的soc下降限制控制,若之后判别为从所述当前定时到所述位置开始定时为止的时间成为了所述设定时间,则直到所述混合动力车辆位于所述限制期间中的所述变动限制地带内为止,执行所述soc上升控制或所述soc下降限制控制。
[0021]
[结构5]
[0022]
一种控制方法,是具备内燃机及电动机的混合动力车辆的控制方法,其中,
[0023]
预先设置有限制期间及容许期间预先被设定的变动限制地带,在所述限制期间中的所述变动限制地带内,所述内燃机的运转被限制,在所述容许期间中的所述变动限制地带内,所述内燃机的运转被容许,
[0024]
在判别为所述混合动力车辆位于所述限制期间中的所述变动限制地带内时,限制所述内燃机的运转,并且使所述电动机运转而驱动所述混合动力车辆,
[0025]
在判别为从所述混合动力车辆位于所述变动限制地带外或所述容许期间中的所述变动限制地带内的当前定时到所述混合动力车辆开始位于所述限制期间中的所述变动限制地带内的位置开始定时为止的时间比预先确定的设定时间短时,与判别为从所述当前定时到所述位置开始定时为止的时间比所述设定时间长时相比,增大所述混合动力车辆的蓄电池的soc的上升速度或者减小所述soc的下降速度。
[0026]
发明效果
[0027]
在设置有变动限制地带的情况下,能够限制混合动力车辆的蓄电池的soc不足。
附图说明
[0028]
图1是本公开的实施例的控制系统的概略整体图。
[0029]
图2是本公开的实施例的限制地带的概略图。
[0030]
图3是本公开的实施例中的(a)变动限制地带及(b)固定限制地带的示意图。
[0031]
图4是说明本公开的实施例中的车辆与服务器之间的通信的示意图。
[0032]
图5是说明本公开的另一实施例中的车辆与服务器之间的通信的示意图。
[0033]
图6是示出在当前定时下位于限制对象的限制地带外的车辆之后位于限制对象的限制地带内的情况的示意性的时间图。
[0034]
图7是示出在当前定时下位于限制对象的限制地带外的车辆之后位于限制对象的限制地带内的情况的示意性的时间图。
[0035]
图8是示出在当前定时下位于限制对象的限制地带外的车辆之后位于限制对象的限制地带内的情况的示意性的时间图。
[0036]
图9是示出在当前定时下位于限制对象的限制地带外的车辆之后位于限制对象的
限制地带内的情况的示意性的时间图。
[0037]
图10是用于说明本公开的实施例中的soc上升促进控制的时间图。
[0038]
图11是用于说明本公开的另一实施例中的soc下降限制控制的时间图。
[0039]
图12是用于执行本公开的实施例的车辆驾驶控制例程的流程图。
[0040]
图13是用于执行本公开的实施例的车辆驾驶控制例程的流程图。
[0041]
图14是本公开的实施例中的车辆的功能框图。
[0042]
图15是本公开的实施例中的服务器的功能框图。
[0043]
标号说明
[0044]
1控制系统
[0045]
10混合动力车辆
[0046]
11内燃机
[0047]
12电动发电机
[0048]
20车辆的电子控制单元
[0049]
30服务器
[0050]
40服务器的电子控制单元
具体实施方式
[0051]
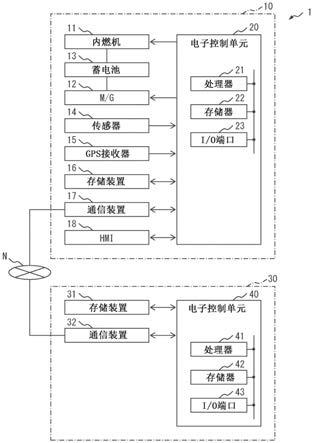
参照图1,本公开的实施例的混合动力车辆的控制系统1具备混合动力车辆10和混合动力车辆10的外部的服务器30。
[0052]
本公开的实施例的混合动力车辆10具备内燃机11及电动发电机(m/g)12、蓄电池13、至少1个传感器14、gps接收器15、存储装置16、通信装置17、hmi(人机接口)18及电子控制单元20。
[0053]
本公开的实施例的内燃机11例如由火花点火内燃机或压缩着火内燃机构成。内燃机11(例如,燃料喷射阀、火花塞、节气门等)基于来自电子控制单元20的信号而被控制。
[0054]
另外,本公开的实施例的电动发电机12作为电动机或发电机而工作。电动发电机12基于来自电子控制单元20的信号而被控制。
[0055]
在本公开的实施例中,能够将混合动力车辆10的驾驶模式在ev模式与hv模式之间切换。在本公开的实施例的ev模式下,内燃机11被停止且电动发电机12作为电动机而运转。在该情况下,电动发电机12的输出向车轴传递。另一方面,在本公开的实施例的hv模式下,内燃机11运转并且电动发电机12作为电动机而运转。在该情况下,在一例中,内燃机11的输出及电动发电机12的输出向车轴传递。在另一例中,电动发电机12的输出向车轴传递,内燃机11的输出向发电机(未图示)传递,发电机工作。由发电机产生的电力向电动发电机12或蓄电池13输送。在又一例中,内燃机11的输出的一部分和电动发电机12的输出向车轴传递,内燃机11的输出的剩余部分向发电机传递。由发电机产生的电力向电动发电机12或蓄电池13输送。另外,在本公开的实施例中,在ev模式及hv模式下,例如进行在减速驾驶时将电动发电机12作为发电机来使用的再生控制。通过再生控制而产生的电力向蓄电池13输送。
[0056]
本公开的实施例的蓄电池13通过来自作为发电机工作的电动发电机12或由内燃机11驱动的发电机(未图示)的电力而被充电。在另一实施例(未图示)中,蓄电池13也能够通过外部电源而充电。另一方面,在本公开的实施例中,电力从蓄电池13向作为电动机工作
的电动发电机12、电子控制单元20及其他的车载设备供给。
[0057]
本公开的实施例的传感器14检测各种原始数据。在本公开的实施例的传感器14中,例如包括用于检测由加速器踏板的踩踏量表示的要求车辆负荷的负荷传感器、用于检测内燃机11的节气门开度的节气门开度传感器、用于检测内燃机11的废气中的nox浓度的nox传感器、用于检测内燃机11的转速的转速传感器、用于检测蓄电池13的电压及电流的电压计及电流计、用于检测车辆10的速度的速度传感器等。这些传感器14的输出信号向电子控制单元20输入。
[0058]
本公开的实施例的gps接收器15接收来自gps卫星的信号,由此检测表示车辆10的绝对位置(例如,经度及纬度)的信息。车辆10的位置信息向电子控制单元20输入。
[0059]
在本公开的实施例的存储装置16中预先存储有各种数据。本公开的实施例的通信装置17能够与例如互联网这样的通信网n连接。
[0060]
本公开的实施例的hmi18在车辆10的乘员(包括驾驶员)与控制系统1之间进行信息的交换。具体而言,hmi18具备对车辆10的乘员进行例如视觉、听觉、触觉、嗅觉的通知的通知功能和接受来自车辆10的乘员的输入的输入功能。hmi18为了通知功能而例如包含显示器、灯、扬声器、振动器等,为了输入功能而包含触摸面板、按钮、开关等。在另一实施例(未图示)中,hmi18不具备输入功能而具备通知功能。
[0061]
本公开的实施例的车辆10的电子控制单元20具备通过双向性总线而互相以能够通信的方式连接的1个或多个处理器21、1个或多个存储器22及输入输出(i/o)端口23。存储器22例如具备rom、ram等。在存储器22中存储有各种程序,通过这些程序由处理器21执行而实现各种功能。在本公开的实施例的输入输出端口23上以能够通信的方式连接上述的内燃机11、电动发电机12、传感器14、gps接收器15、存储装置16、通信装置17及hmi18。另外,在本公开的实施例的处理器21中,蓄电池13的soc或充电率例如基于蓄电池13的电压及电流而被算出。
[0062]
进一步参照图1,本公开的实施例的服务器30具备存储装置31、通信装置32及电子控制单元40。
[0063]
在本公开的实施例的存储装置31中存储有预先确定的限制地带的信息。在图2中示意性地示出本公开的实施例的限制地带rz的一例。本公开的实施例的限制地带rz由封闭的边界bd包围。限制地带rz例如设定于城市部。需要说明的是,在本公开的实施例中,限制地带rz之外的区域被称作一般地带genz。
[0064]
本公开的实施例的通信装置32能够与通信网n连接。因此,车辆10和服务器20能够经由通信网n而互相连接。
[0065]
本公开的实施例的服务器30的电子控制单元40与车辆10的电子控制单元20同样,具备通过双向性总线而互相以能够通信的方式连接的1个或多个处理器41、1个或多个存储器42及输入输出端口43。在本公开的实施例的输入输出端口43上以能够通信的方式连接上述的存储装置31及通信装置32。
[0066]
在本公开的实施例的限制地带rz中,内燃机11的运转至少暂时性地被限制。在一例中,内燃机11的运转至少暂时性地被禁止。
[0067]
在图3(a)所示的例子的限制地带rz中,在预先确定的期间例如1天(24小时)内,设定从限制开始定时trs到限制结束定时tre为止的限制期间pr和限制期间pr以外的容许期
间pp。在限制期间pr中的限制地带rz中,内燃机11的运转被限制,在限制期间pr以外的容许期间pp中的限制地带rz中,内燃机11的运转被容许。在本公开的实施例中,这样的限制地带被称作变动限制地带。在另一实施例(未图示)中,限制期间pr在1天被多次设定。在又一实施例(未图示)中,限制期间pr以星期几、天、周、月等单位设定。另一方面,在图3(b)所示的例子的限制地带rz中,与时间等无关,内燃机11的运转持续地被限制。在本公开的实施例中,这样的限制地带被称作固定限制地带。
[0068]
即,在本公开的实施例中,在车辆10位于限制期间pr中的变动限制地带rz内或固定限制地带rz内时,内燃机11的运转被限制。需要说明的是,在本公开的实施例中,有时将限制期间pr中的变动限制地带rz或固定限制地带rz称作限制对象的限制地带rzr。相对于此,在车辆10位于容许期间pp中的变动限制地带rz内或一般地带genz内时,内燃机11的运转被容许。
[0069]
限制对象的限制地带rzr中的内燃机11的运转的限制基于法定或非法定的规则。在一例中,若违反该规则,则课以罚金这样的惩罚。在另一例中,若遵守该规则,则提供积分等奖励。
[0070]
在本公开的实施例中,判别在当前定时下车辆10是位于限制地带rz内还是位于一般地带genz内。需要说明的是,在该情况下的限制地带rz中,包括限制期间中的变动限制地带rz、容许期间中的变动限制地带rz及固定限制地带rz。
[0071]
在判别为在当前定时下车辆10位于一般地带genz内时,车辆10的驾驶模式被设定为ev模式或hv模式。在一例中,在车辆10的要求输出比预先确定的设定输出小时被设定为ev模式,在要求输出比设定输出大时被设定为hv模式。另外,在蓄电池13的soc比预先确定的设定soc高时被设定为ev模式,在soc比设定soc低时被设定为hv模式。在该情况下的hv模式下,通过内燃机11而发电机运转,蓄电池13的soc被提高。需要说明的是,在本公开的实施例中,这样的驾驶模式的控制被称作通常控制。
[0072]
相对于此,在判别为在当前定时下车辆10位于限制地带rz内时,判别该限制地带rz是变动限制地带rz还是固定限制地带rz。
[0073]
在判别为车辆10所处的限制地带rz是固定限制地带rz时,车辆10的驾驶模式被设定为ev模式。即,内燃机11的运转被限制。
[0074]
另一方面,在判别为车辆10所处的限制地带rz是变动限制地带rz时,接着判别当前定时是否为该变动限制地带rz的限制期间pr内。在判别为当前定时为该变动限制地带rz的限制期间pr内时,车辆10的驾驶模式被设定为ev模式。相对于此,在判别为当前定时为该变动限制地带rz的容许期间pp内时,进行通常控制。
[0075]
在本公开的实施例中,车辆10是否位于限制地带rz内的判断例如如以下这样进行。即,如图4所示,首先,在车辆10中,从gps接收器15取得当前定时下的车辆10的位置信息。接着,位置信息从车辆10发送,由服务器30接收。在服务器30中,基于车辆10的位置信息来确定当前定时下的车辆10的附近的限制地带rz,确定出的限制地带rz的信息被从存储装置31提取。在存储装置31内的限制地带rz的信息中,除了限制地带rz的位置信息(例如,纬度及经度)之外,还包括该限制地带rz是变动限制地带还是固定限制地带的信息,在变动限制地带的情况下还包括限制期间pr的信息(例如,限制开始定时trs及限制结束定时tre)等。接着,在服务器30中,判别在当前定时下车辆10是否位于确定出的限制地带rz内、车辆
10所处的限制地带rz是否是变动限制地带、当前定时是否为限制期间pr内等。接着,该判别结果从服务器30发送,由车辆10接收。
[0076]
相对于此,在图5所示的另一实施例中,首先,在车辆10中,取得当前定时下的车辆10的位置信息。接着,位置信息从车辆10发送,由服务器30接收。在服务器30中,基于车辆10的位置信息来确定当前定时下的车辆10的附近的限制地带rz,确定出的限制地带rz的信息被从存储装置31提取。接着,确定出的限制地带rz的信息从服务器30发送,由车辆10接收。接着,在车辆10中,判别在当前定时下车辆10是否位于确定出的限制地带rz内。
[0077]
在又一实施例(未图示)中,在车辆10的存储装置16内存储有限制地带rz的信息。在该情况下,车辆10以不与服务器30通信的方式确定限制地带rz,判断车辆10是否位于限制地带rz内等。
[0078]
也存在以下情况:即使在当前定时下车辆10位于限制对象的限制地带rzr外,之后,车辆10会位于限制对象的限制地带rzr内。
[0079]
即,在图6所示的例子中,车辆10在当前定时t0下位于容许期间pp中的变动限制地带rz(pr)内。若车辆10继续位于该变动限制地带rz内,接着成为限制开始定时trs,则车辆10变成位于限制期间中的变动限制地带地带rz(pr)、即限制对象的限制地带rzr内。
[0080]
在图7所示的例子中,车辆10在当前定时t0下位于一般地带genz内。此时,车辆10的附近的变动限制地带rz为容许期间pp中。接着,若成为进入定时tent,则车辆10进入容许期间pp中的变动限制地带rz(pp)内。接着,若成为限制开始定时trs,则车辆10变成位于限制期间中的变动限制地带rz(pr)、即限制对象的限制地带rzr内。
[0081]
在图8所示的例子中,车辆10在当前定时t0下位于一般地带genz内。此时,车辆10的附近的变动限制地带rz为容许期间pp中。在接下来的限制开始定时trs下,车辆10也位于一般地带genz内。接着,若成为进入定时tent,则车辆10进入限制期间pr中的变动限制地带rz(pr)内。因此,车辆10位于限制对象的限制地带rzr内。
[0082]
在图9所示的例子中,车辆10在当前定时t0下位于一般地带genz内。接着,若成为进入定时tent,则车辆10进入固定限制地带rz内,位于限制对象的限制地带rzr内。
[0083]
需要说明的是,在上述的图6及图7所示的例子中,车辆10在限制开始定时trs下开始位于限制对象的限制地带rzr内。另一方面,在图8及图9所示的例子中,车辆10在进入定时tent下开始位于限制对象的限制地带rzr内。在本公开的实施例中,车辆10开始位于限制对象的限制地带rzr内的定时被称作位置开始定时tps。该位置开始定时tps在图6及图7所示的例子中是限制开始定时trs,在图8及图9所示的例子中是进入定时tent。
[0084]
若车辆10位于限制对象的限制地带rzr内,则内燃机11的运转被限制,因此车辆10中的发电被限制。因而,蓄电池13的soc下降,车辆10可能会无法到达例如限制地带rz内的充电设备或限制对象的限制地带rzr外。
[0085]
于是,在本公开的实施例中,概略地说,在车辆10位于限制对象的限制地带rzr内之前、即位置开始定时tps之前,执行使蓄电池13的soc上升或者抑制soc下降的soc控制。在一例中,以使车辆10开始位于限制对象的限制地带rzr内的时间点下的soc成为soc要求值的方式进行soc控制。soc要求值例如是在车辆10位于限制对象的限制地带rzr内后soc不低于下限值socl而车辆10移动至能够使soc上升的位置所需的soc。在此,下限值socl是若soc低于下限值socl则soc的恢复显著变得困难的soc。需要说明的是,在能够使soc上升的位置
中,例如包括充电设备、容许期间pp中的变动限制地带rz及一般地带genz、下坡等。
[0086]
在soc控制的一例中,进行soc上升促进控制。在soc上升促进控制中,例如,内燃机11运转,并且通过内燃机11的输出的至少一部分而发电机运转,由此,soc的上升速度被设为比通常控制时大。其结果,能够限制车辆10在限制对象的限制地带rzr内soc不足。
[0087]
在该情况下,能够从当前定时t0到位置开始定时tps为止进行soc上升促进控制。然而,若从当前定时t0开始soc上升促进控制,则soc可能会成为过剩。
[0088]
于是,在本公开的实施例中,算出假定为从当前定时到位置开始定时tps为止进行了soc上升促进控制时的位置开始定时tps下的soc的预测值socp。在soc预测值socp比soc要求值socr大时,不进行soc上升促进控制。soc预测值socp随着时间的经过而下降。接着,若soc预测值socp成为soc要求值socr,则soc上升促进控制开始。接着,若成为位置开始定时tps,则soc上升促进控制结束。其结果,能够限制soc成为过剩并限制soc不足。
[0089]
即,在图10所示的例子中,若从定时ta0到位置开始定时tps为止进行soc上升促进控制,则如虚线所示,位置开始定时tps下的soc相对于soc要求值socr成为过剩。于是,在本公开的实施例中,若在定时ta1下soc预测值socp成为soc要求值socr,则soc上升促进控制开始。其结果,如图10的实线所示,soc上升。接着,若成为位置开始定时tps,则soc上升促进控制结束。此时的soc为soc要求值socr。
[0090]
在图10中,ta2表示车辆10到达了目的地的定时。这样,在本公开的实施例中,soc不低于下限值socl而车辆10到达目的地。相对于此,在图10中,点线表示不进行soc上升促进控制的情况下的soc。在该情况下,在车辆10到达目的地前soc会低于下限值socl。
[0091]
在soc控制的另一例中,进行soc下降限制控制。在soc下降限制控制中,例如,内燃机11运转,并且通过内燃机11的输出的至少一部分而发电机运转,由此,soc的下降速度被设为比通常控制时小。在一例中,soc被维持为恒定。
[0092]
在该情况下,如图11所示,若从定时tb0到位置开始定时tps为止进行soc下降限制控制,则如虚线所示,位置开始定时tps下的soc相对于soc要求值socr成为过剩。在本公开的实施例中,算出假定为直到位置开始定时tps为止进行了soc下降限制控制时的位置开始定时tps下的soc的预测值socp。在soc预测值socp比soc要求值socr大时,不进行soc下降限制控制。如图11所示,soc预测值socp随着时间的经过而下降。接着,在定时tb1下,若soc预测值socp成为soc要求值socr,则soc下降限制控制开始。其结果,如图11的实线所示,soc被维持。接着,若成为位置开始定时tps,则soc下降限制控制结束。此时的soc为soc要求值socr。需要说明的是,在图11中,tb2表示车辆10到达了例如目的地的定时,点线表示不进行soc下降限制控制的情况下的soc。
[0093]
需要说明的是,在本公开的实施例中,在判别为在当前定时下车辆10位于限制地带rz外时,取得车辆10的前进路线信息,基于该前进路线信息来判别车辆10是否有之后进入限制地带rz内的计划。例如,在车辆10具备自动驾驶功能的情况下,取得由该自动驾驶功能设定的车辆10的前进路线的信息。或者,基于车辆10的行驶履历来预测车辆10的前进路线。需要说明的是,前进路线信息例如呈多个将来时刻与各时刻下的车辆10的位置的组合的形式。另外,在本公开的实施例中,在判别为车辆10有进入限制地带rz内的计划时,例如,根据车辆10的前进路线信息和限制地带rz的位置信息及限制期间pr的信息来算出进入定时tent。而且,位置开始定时tps作为进入定时tent和限制开始定时trs中的较晚的一方而
算出。
[0094]
例如如图4所示,在由服务器30判别为车辆10是否位于限制地带rz内的情况下,由服务器30判别车辆10是否有进入限制地带rz内的计划。在该情况下,车辆10的前进路线信息与车辆10的位置信息一起从车辆10向服务器30发送。相对于此,例如如图5所示,在由车辆10判别车辆10是否位于限制地带rz内的情况下,由车辆10判别车辆10是否有进入限制地带rz内的计划。在该情况下,无需将车辆10的前进路线信息从车辆10向服务器30发送。
[0095]
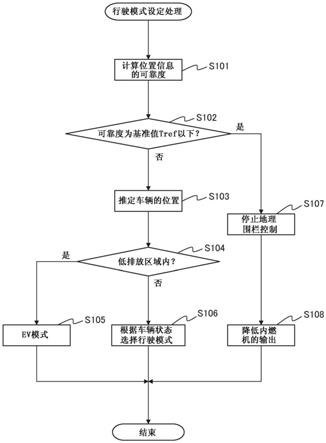
图12及图13示出了用于执行本公开的实施例中的车辆10的驾驶控制的例程。该例程在车辆10的电子控制单元20中反复执行。
[0096]
参照图12及图13,首先在步骤100中判别车辆10在当前定时下是否位于限制地带rz内。在判别为车辆10在当前定时下位于限制地带rz内时,从步骤100进入步骤101,判别该限制地带rz是变动限制地带还是固定限制地带。在判别为该限制地带rz是变动限制地带时,接着进入步骤102,判别当前定时是否为限制期间pr内。在当前定时为限制期间pr内时,接着进入步骤103,进行ev模式。即,内燃机11的运转被限制。在步骤101中判别为该限制地带rz是固定限制地带时,也接着进入步骤103,进行ev模式。
[0097]
相对于此,在步骤102中判别为当前定时为限制期间pr外、即为容许期间pp内时,接着进入步骤104,位置开始定时tps被设定为限制开始定时trs。在接下来的步骤105中,算出假定为从当前定时到限制开始定时trs为止进行了soc上升促进控制时的soc预测值socp。在接下来的步骤106中,算出soc要求值socr。在接下来的步骤107中,判别soc预测值socp是否为soc要求值socr以下。在socp》socr时,接着进入步骤108,进行通常控制。相对于此,若成为socp≤socr,则进入步骤109,执行soc控制。
[0098]
另一方面,在步骤100中判别为车辆10在当前定时下位于限制地带rz外时,接着进入步骤110,判别车辆10是否有进入限制地带rz内的计划。在判别为车辆10没有进入限制地带rz内的计划时,接着进入步骤108。
[0099]
相对于此,在判别为车辆10有进入限制地带rz内的计划时,从步骤110进入步骤111,判别该限制地带rz是变动限制地带还是固定限制地带。在判别为该限制地带rz是变动限制地带时,接着进入步骤112,判别车辆10向该限制地带rz的进入定时tent是否为限制期间pr内。在进入定时tent为限制期间pr内时,接着进入步骤113,位置开始定时tps被设定为进入定时tent。接着进入步骤105,算出假定为从当前定时到进入定时tent为止进行了soc上升促进控制时的soc预测值socp。另一方面,在步骤112中判别为进入定时tent为限制期间pr外、即为容许期间pp内时,接着进入步骤104,位置开始定时tps被设定为限制开始定时trs。
[0100]
图14示出了本公开的实施例的车辆10的功能框图。参照图4并参照图14,本公开的实施例的车辆10的电子控制单元20包括位置信息取得部20a、前进路线信息取得部20b、驾驶控制部20c及soc控制部20d。
[0101]
在图14所示的例子中,位置信息取得部20a从gps接收器15取得车辆10的位置信息,并向服务器30发送。前进路线信息取得部20b取得车辆10的前进路线信息,并向服务器30发送。驾驶控制部20c将驾驶模式在ev模式与hv模式之间变更。soc控制部20d进行上述的soc控制。
[0102]
另一方面,图15示出了本公开的实施例的服务器30的功能框图。参照图4并参照图
15,本公开的实施例的服务器30的电子控制单元40包括判别部40a。在图15所示的例子中,判别部40a判别在当前定时下车辆10是否处于限制地带rz内,将判别结果向车辆10发送。另外,判别部40a根据需要而判别车辆10是否有进入限制地带rz内的计划,将判别结果向车辆10发送。而且,判别部40a根据需要而算出位置开始定时tps。
[0103]
在图5所示的另一实施例中,车辆10的电子控制单元20还具备与上述的判别部40a同样的判别部。
[0104]
在图10所示的例子中,如上所述,在socp》socr时不进行soc上升促进控制,若在时间ta1下成为socp=socr,则进行soc上升促进控制。在图11所示的例子中,在socp》socr时不进行soc下降限制控制,若在时间tb1下成为socp=socr,则进行soc下降限制控制。在此,若着眼于从当前定时到位置开始定时tps为止的时间幅度即限制前时间(即,从当前定时到车辆10开始位于限制对象的限制地带rzr内为止的时间)和从成为socp=socr的时间(在图10的例子中是ta1,在图11的例子中是tb1)到位置开始定时tps为止的时间幅度即预先确定的设定时间,则在本公开的实施例中,在限制前时间比设定时间短时,与判别为限制前时间比设定时间长时相比,蓄电池13的soc的上升速度被增大或者soc的下降速度被减小。
[0105]
需要说明的是,该情况下的设定时间是从假定为从车辆10位于限制对象的限制地带rzr外的当前定时到位置开始定时tps为止执行了soc控制时的位置开始定时tps下的soc的预测值socp成为soc要求值socr的时间(ta1、tb1)到位置开始定时tps为止的时间幅度。
[0106]
另一方面,若着眼于soc预测值socp及soc要求值socr,则在本公开的实施例中,在soc预测值socp比soc要求值socr大时,soc控制(soc上升促进控制或soc下降限制控制)被停止,若soc预测值socp成为soc要求值socr以下,则soc控制被执行。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。