1.本发明涉及混合动力车辆的控制装置及控制方法。
背景技术:
2.近年来,为了减少大气污染,在交通量多的市区那样的场所,设定有在车辆行驶时要求内燃机的停止的低排放区域(例如lez等)。当具备内燃机及电动马达的混合动力车辆在这样的低排放区域中行驶时,需要使内燃机停止而仅通过电动马达输出行驶用的动力。
3.关于这一点,在专利文献1中记载了如下内容:当判定为混合动力车辆的位置处于低排放区域(在专利文献1中为“大气污染防止强化地域”)内时,使内燃机停止。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开平07-075210号公报
技术实现要素:
7.发明所要解决的课题
8.但是,根据车辆位置检测装置的异常、行驶环境的变化等,存在混合动力车辆的位置的推定精度降低的情况。在该情况下,由于位置的误识别,存在尽管混合动力车辆的位置处于低排放区域内,但驱动内燃机而使废气排放恶化的可能。
9.因此,鉴于上述课题,本发明的目的在于,抑制在误识别了混合动力车辆的位置时,由于内燃机的驱动而导致低排放区域中的废气排放恶化的情况。
10.用于解决课题的技术方案
11.本公开的要点如下。
12.(1)一种混合动力车辆的控制装置,对具备内燃机、电动马达、蓄电池和车辆位置检测装置的混合动力车辆进行控制,其中,包括:位置推定部,使用所述车辆位置检测装置来推定所述混合动力车辆的位置;可靠度计算部,计算所述混合动力车辆的位置信息的可靠度;及动力输出部,控制所述内燃机和所述电动马达来输出行驶用的动力,在所述可靠度为基准值以下时,与该可靠度高于该基准值时相比,所述动力输出部使所述内燃机的输出降低。
13.(2)根据上述(1)所述的混合动力车辆的控制装置,其中,在所述可靠度为所述基准值以下时,与该可靠度高于该基准值时相比,所述动力输出部使所述电动马达的输出增加。
14.(3)根据上述(1)或(2)所述的混合动力车辆的控制装置,其中,所述混合动力车辆还具备输出装置,在由于所述可靠度的降低而使所述内燃机的输出降低的情况下,所述动力输出部经由所述输出装置向所述混合动力车辆的乘员通知由该可靠度的降低引起的该内燃机的输出降低。
15.(4)根据上述(3)所述的混合动力车辆的控制装置,其中,所述动力输出部根据所
述混合动力车辆的乘员的要求,解除由所述可靠度的降低引起的所述内燃机的输出降低。
16.(5)根据上述(1)或(2)所述的混合动力车辆的控制装置,其中,在所述可靠度为所述基准值以下时,所述动力输出部使所述内燃机停止而仅通过所述电动马达输出行驶用的动力。
17.(6)根据上述(5)所述的混合动力车辆的控制装置,其中,所述混合动力车辆还具备输出装置,在由于所述可靠度的降低而将所述混合动力车辆的行驶模式设定为ev模式的情况下,所述动力输出部经由所述输出装置向所述混合动力车辆的乘员通知由于该可靠度的降低而进行的该行驶模式的设定,所述ev模式是使所述内燃机停止而仅通过所述电动马达输出行驶用的动力的模式。
18.(7)根据上述(6)所述的混合动力车辆的控制装置,其中,所述动力输出部根据所述混合动力车辆的乘员的要求,解除由于所述可靠度的降低而进行的所述行驶模式的设定。
19.(8)根据上述(5)至(7)中任一项所述的混合动力车辆的控制装置,其中,所述控制装置还具备计算所述蓄电池的充电率的充电率计算部,所述混合动力车辆具备gnss接收机作为所述车辆位置检测装置,所述位置推定部基于该gnss接收机的输出来推定该混合动力车辆的位置,在所述混合动力车辆的位置处于要求所述内燃机的停止的低排放区域附近、且所述充电率为下限阈值以上的情况下,当所述可靠度为所述基准值以下时,所述动力输出部使所述内燃机停止而仅通过所述电动马达输出行驶用的动力。
20.(9)根据上述(8)所述的混合动力车辆的控制装置,其中,所述可靠度计算部基于所述gnss接收机的接收状况来计算所述可靠度。
21.(10)根据上述(8)或(9)所述的混合动力车辆的控制装置,其中,所述可靠度计算部在向所述gnss接收机的电力供给停止了规定时间以上时,将所述可靠度计算为所述基准值以下的值。
22.(11)根据上述(8)至(10)中任一个所述的混合动力车辆的控制装置,其中,所述可靠度计算部在所述混合动力车辆被输送时,将所述可靠度计算为所述基准值以下的值。
23.(12)根据权利要求(8)至(11)中任一个所述的混合动力车辆的控制装置,其中,所述可靠度计算部在所述混合动力车辆的行进方向被转台变更时,将所述可靠度计算为所述基准值以下的值。
24.(13)根据上述(1)至(12)中任一项所述的混合动力车辆的控制装置,其中,所述混合动力车辆从该混合动力车辆的外部的服务器接收该混合动力车辆的位置信息,所述可靠度计算部在所述混合动力车辆与所述服务器之间的通信被切断时,将所述可靠度计算为所述基准值以下的值。
25.(14)根据上述(1)至(13)中任一项所述的混合动力车辆的控制装置,其中,所述可靠度计算部在检测出所述车辆位置检测装置的故障时将所述可靠度计算为所述基准值以下的值。
26.(15)一种混合动力车辆的控制方法,所述混合动力车辆具备内燃机、电动马达、蓄电池和车辆位置检测装置,其中,所述控制方法包括如下步骤:使用所述车辆位置检测装置来推定所述混合动力车辆的位置;计算所述混合动力车辆的位置信息的可靠度;及在所述可靠度为基准值以下时,与该可靠度高于该基准值时相比,使所述内燃机的输出降低。
27.发明效果
28.根据本发明,能够抑制在误识别了混合动力车辆的位置时,由于内燃机的驱动而导致低排放区域中的废气排放恶化的情况。
附图说明
29.图1是概略地表示本发明的第一实施方式所涉及的混合动力车辆的结构的图。
30.图2是表示本发明的第一实施方式所涉及的混合动力车辆的动力传动系的一例的图。
31.图3是图1的ecu的功能框图。
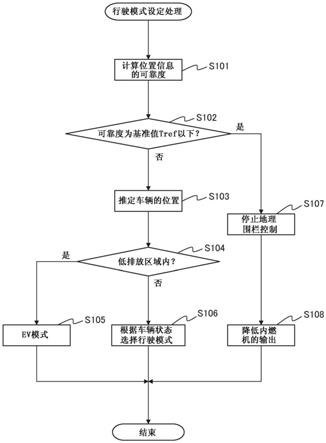
32.图4是表示本发明的第一实施方式中的行驶模式设定处理的控制例程的流程图。
33.图5是用作车辆位置检测装置的路车间通信机的概略图。
34.图6是概略地表示本发明的第二实施方式所涉及的混合动力车辆的结构的图。
35.图7是表示本发明的第二实施方式中的行驶模式设定处理的控制例程的流程图。
36.图8是表示本发明的第二实施方式中的解除要求确认处理的控制例程的流程图。
37.图9是表示在由于位置信息的可靠度的降低而使内燃机的输出降低时显示于hmi的画面的一例的图。
38.图10是表示在由于位置信息的可靠度的降低而将行驶模式设定为ev模式时显示于hmi的画面的一例的图。
39.图11是表示本发明的第三实施方式中的行驶模式设定处理的控制例程的流程图。
40.图12是包括本发明的第四实施方式所涉及的混合动力车辆的客户端服务器系统的概略结构图。
41.图13是概略地表示本发明的第四实施方式所涉及的混合动力车辆的结构的图。
42.图14是表示本发明的第四实施方式中的行驶模式设定处理的控制例程的流程图。
具体实施方式
43.以下,参照附图对本发明的实施方式进行详细说明。另外,在以下的说明中,对同样的构成元件附以相同的参照编号。
44.《第一实施方式》
45.首先,参照图1~图5对本发明的第一实施方式进行说明。
46.《车辆整体的说明》
47.图1是概略地表示本发明的第一实施方式所涉及的混合动力车辆1的结构的图。如图1所示,混合动力车辆1具备gnss接收机2、地图数据库3、导航装置4、传感器5、内燃机6、电动马达7及电子控制单元(ecu(electronic control unit))10。gnss接收机2、地图数据库3、导航装置4、传感器5、内燃机6及电动马达7经由遵照can(controller area network:控制器局域网)等标准的车内网络与ecu10以能够通信的方式连接。
48.gnss接收机2捕捉多个定位卫星,并接收从定位卫星发送的电波。gnss接收机2基于电波的发送时刻与接收时刻之差来计算到定位卫星为止的距离,并基于到定位卫星为止的距离和定位卫星的位置(轨道信息)来检测混合动力车辆1的当前位置(例如混合动力车辆1的纬度和经度)。gnss接收机2的输出被发送到ecu10,ecu10从gnss接收机2取得混合动
力车辆1的当前位置。gnss接收机2是对混合动力车辆1的当前位置进行检测的车辆位置检测装置的一例。另外,gnss(global navigation satellite system:全球导航卫星系统)是美国的gps、俄罗斯的glonass、欧洲的galileo、日本的qzss、中国的beidou、印度的irnss等卫星定位系统的总称。即,gnss接收机2包括gps接收机。
49.地图数据库3存储有地图信息。ecu10从地图数据库3取得地图信息。
50.导航装置4基于由gnss接收机2检测出的混合动力车辆1的当前位置、地图数据库3的地图信息、驾驶员的输入等,来设定到目的地为止的混合动力车辆1的行驶路线。由导航装置4设定的行驶路线被发送到ecu10。另外,gnss接收机2和地图数据库3也可以内置于导航装置4。
51.传感器5检测与混合动力车辆1相关的状态量,包括车速传感器、陀螺传感器等。传感器5的输出被发送到ecu10,ecu10取得由传感器5检测出的状态量。
52.内燃机6和电动马达7分别输出行驶用的动力,作为混合动力车辆1的驱动装置发挥功能。ecu10控制内燃机6和电动马达7。
53.图2是表示本发明的第一实施方式所涉及的混合动力车辆1的动力传动系的一例的图。混合动力车辆1具备内燃机6、第一电动发电机21、动力分配机构22、第二电动发电机7a、功率控制单元(pcu)23、蓄电池24及减速器27。
54.内燃机6使燃料与空气的混合气在气缸内燃烧而输出动力,例如是汽油发动机或柴油发动机。内燃机6的输出轴(曲轴)与动力分配机构22机械连接,内燃机6的输出被输入到动力分配机构22。
55.动力分配机构22构成为包括太阳轮、齿圈、小齿轮及行星齿轮架的公知的行星齿轮机构。动力分配机构22将内燃机6的输出分配给第一电动发电机21和减速器27。分配到减速器27的内燃机6的输出作为行驶用的动力而经由车轴28传递到车轮29。因此,内燃机6能够输出行驶用的动力。
56.第一电动发电机21作为发电机和电动机发挥功能。在第一电动发电机21作为发电机发挥功能时,内燃机6的输出经由动力分配机构22供给到第一电动发电机21。第一电动发电机21使用内燃机6的输出发电产生电力。由第一电动发电机21发电产生的电力经由pcu23供给到第二电动发电机7a及蓄电池24中的至少一方。
57.另一方面,在第一电动发电机21作为电动机发挥功能时,蓄积在蓄电池24中的电力经由pcu23供给到第一电动发电机21。第一电动发电机21的输出经由动力分配机构22供给到内燃机6的输出轴,进行内燃机6的起转。
58.第二电动发电机7a作为电动机和发电机发挥功能。在第二电动发电机7a作为电动机发挥功能时,由第一电动发电机21发电产生的电力和蓄积在蓄电池24中的电力中的至少一方被供给到第二电动发电机7a。第二电动发电机7a的输出被供给到减速器27,供给到减速器27的第二电动发电机7a的输出作为行驶用的动力而经由车轴28传递到车轮29。因此,第二电动发电机7a能够输出行驶用的动力。第二电动发电机7a是图1的电动马达7的一例。
59.另一方面,在混合动力车辆1减速时,通过车轮29的旋转来驱动第二电动发电机7a,第二电动发电机7a作为发电机发挥功能。此时,进行所谓的再生,由第二电动发电机7a发电产生的再生电力经由pcu23供给到蓄电池24。
60.pcu23具有变换器、升压转换器及dcdc转换器,并与第一电动发电机21、第二电动
发电机7a及蓄电池24电连接。pcu23将从蓄电池24供给的直流电力变换为交流电力,并将由第一电动发电机21或第二电动发电机7a发电产生的交流电力变换为直流电力。
61.向蓄电池24供给使用内燃机6的输出而由第一电动发电机21发电产生的电力和使用再生能量而由第二电动发电机7a发电产生的再生电力。因此,蓄电池24能够通过内燃机6的输出及再生能量进行充电。蓄电池24是锂离子电池、镍氢电池等二次电池。
62.另外,混合动力车辆1具备充电端口25和充电器26,蓄电池24还能够通过外部电源30进行充电。即,图2所示的混合动力车辆1是所谓的插电式混合动力车辆(phev)。
63.充电端口25构成为经由充电电缆31的充电用连接器32从外部电源30接受电力。在通过外部电源30对蓄电池24进行充电时,充电用连接器32连接到充电端口25。充电器26将从外部电源30供给的电力变换为能够供给到蓄电池24的电力。
64.另外,soc传感器5a设置于蓄电池24,该soc传感器5a检测用于计算蓄电池24的充电率(soc:state of charge)的蓄电池24的状态量(电压、电流等)。soc传感器5a的输出被发送到ecu10,ecu10取得由soc传感器5a检测出的蓄电池24的状态量,并基于蓄电池24的状态量来计算蓄电池24的soc。
65.另外,第一电动发电机21也可以是不作为电动机发挥功能的发电机。另外,第二电动发电机7a也可以是不作为发电机发挥功能的电动机。另外,也可以是充电端口25与pcu23连接,pcu23作为充电器26发挥功能。
66.《混合动力车辆的控制装置》
67.图1所示的ecu10执行混合动力车辆1的各种控制。即,在本实施方式中,ecu10作为控制混合动力车辆1的混合动力车辆1的控制装置发挥功能。另外,在本实施方式中,设置有一个ecu10,但也可以针对每个功能设置多个ecu。
68.如图1所示,ecu10包括通信接口11、存储器12和处理器13。通信接口11、存储器12和处理器13经由信号线彼此连接。
69.通信接口11具有用于将ecu10与遵照can等标准的车内网络连接的接口电路。ecu10经由通信接口11与如上所述的其他车载设备进行通信。
70.存储器12例如具有易失性半导体存储器(例如ram)和非易失性半导体存储器(例如rom)。存储器12存储在处理器13中执行的程序、在由处理器13执行各种处理时使用的各种数据等。
71.处理器13具有一个或多个cpu(central processing unit:中央处理单元)及其外围电路,并执行各种处理。另外,处理器13也可以还具有如逻辑运算单元或数值运算单元那样的运算电路。
72.图3是图1的ecu10的功能框图。在本实施方式中,ecu10具有位置推定部15、可靠度计算部16、充电率计算部17及动力输出部18。位置推定部15、可靠度计算部16、充电率计算部17及动力输出部18是通过ecu10的处理器13执行存储在ecu10的存储器12中的程序而实现的功能模块。
73.位置推定部15使用车辆位置检测装置来推定混合动力车辆1的位置。例如,位置推定部15基于gnss接收机2的输出来推定混合动力车辆1的位置。可靠度计算部16计算混合动力车辆1的位置信息的可靠度。充电率计算部17计算蓄电池24的soc。动力输出部18控制内燃机6和电动马达7来输出行驶用的动力。
74.在本实施方式中,动力输出部18将混合动力车辆1的行驶模式在ev模式和hv模式之间进行切换。在ev模式下,动力输出部18使内燃机6停止而仅驱动电动马达7。另一方面,在hv模式下,动力输出部18至少驱动内燃机6。例如,动力输出部18在hv模式下以使蓄电池24的soc达到目标值的方式驱动内燃机6和电动马达7。另外,ev模式也被称为cd(charge depleting:电量消耗)模式,hv模式也被称为cs(charge sustaining:电量维持)模式。
75.通常,动力输出部18根据混合动力车辆1的车辆状态(要求输出、蓄电池24的soc等)选择行驶模式。例如,动力输出部18将行驶模式设定为ev模式,直到由充电率计算部17计算出的蓄电池24的soc降低到规定值为止,在蓄电池24的soc达到规定值时将行驶模式从ev模式切换为hv模式。另外,即使蓄电池24的soc充足,在上坡路或高速公路等中要求输出变高时,动力输出部18也将行驶模式从ev模式切换为hv模式。
76.但是,为了减少大气污染,在交通量多的市区那样的场所,设定有在车辆行驶时要求内燃机的停止的低排放区域(例如lez(low emission zone:低排放区域)、ulez(ultra low emission zone:超低排放区域)、zez(zero emission zone:零排放区域)等)。在这样的低排放区域中,禁止或限制内燃机的驱动,原则上仅允许能够在不排放废气的情况下行驶的车辆(例如混合动力车辆、电动汽车、燃料蓄电池车等)的通行。在低排放区域中驱动了内燃机的情况下,对车辆的驾驶员处以罚款等。
77.因此,在混合动力车辆1行驶于这样的低排放区域时,需要使内燃机6停止。因此,动力输出部18在混合动力车辆1的位置处于低排放区域内时,尽可能使内燃机6停止而仅通过电动马达7输出行驶用的动力。即,在低排放区域中,动力输出部18优先选择hv模式和ev模式中的ev模式作为行驶模式。
78.但是,根据车辆位置检测装置的异常、行驶环境的变化等,存在混合动力车辆1的位置的推定精度降低的情况。在该情况下,由于位置的误识别,存在尽管混合动力车辆1的位置处于低排放区域内,但内燃机6仍被驱动的可能。
79.因此,在本实施方式中,在混合动力车辆1的位置信息的可靠度为基准值以下时,与混合动力车辆1的位置信息的可靠度高于基准值时相比,动力输出部18使内燃机6的输出降低。由此,能够抑制在误识别了混合动力车辆1的位置时,由于内燃机6的驱动而导致低排放区域中的废气排放恶化的情况。
80.《行驶模式设定处理》
81.以下,使用图4的流程图对上述的控制进行详细说明。图4是表示本发明的第一实施方式中的行驶模式设定处理的控制例程的流程图。本控制例程由ecu10以规定的执行间隔反复执行。
82.首先,在步骤s101中,可靠度计算部16计算混合动力车辆1的位置信息的可靠度(以下简称为“位置信息的可靠度”)。例如,可靠度计算部16判定gnss接收机2有无故障,在检测出gnss接收机2的故障时将位置信息的可靠度计算为基准值tref以下的值(例如0)。在该情况下,例如,在gnss接收机2的输出由于配线的断线等而未被发送到ecu10的情况下、在混合动力车辆1的行驶过程中gnss接收机2在规定时间以上无法接收到来自定位卫星的电波的情况下等,可靠度计算部16判定为gnss接收机2发生了故障。
83.接着,在步骤s102中,动力输出部18判定由可靠度计算部16计算出的位置信息的可靠度是否为基准值tref以下。基准值tref被预先确定。
84.在步骤s102中判定为位置信息的可靠度比基准值tref高的情况下,本控制例程进入步骤s103。在步骤s103中,位置推定部15基于gnss接收机2的输出来推定混合动力车辆1的位置(当前位置)。具体而言,位置推定部15使用地图数据库3的地图信息、gnss接收机2的输出及公知的自主导航(推测导航)来推定混合动力车辆1的位置。即,位置推定部15基于地图数据库3的地图信息及gnss接收机2的输出来确定地图上的基准点(基点),并基于车速传感器、陀螺传感器等传感器5的输出来计算混合动力车辆1相对于基准点的移动距离和移动方向,由此推定混合动力车辆1的位置。
85.接着,在步骤s104中,动力输出部18判定由位置推定部15推定出的混合动力车辆1的位置是否在低排放区域内。低排放区域的位置信息存储于地图数据库3的地图信息,动力输出部18通过将混合动力车辆1的推定位置与低排放区域的范围进行对照来进行该判定。
86.在步骤s104中判定为混合动力车辆1的位置在低排放区域内的情况下,本控制例程进入步骤s105。在步骤s105中,动力输出部18将混合动力车辆1的行驶模式设定为ev模式。即,动力输出部18执行仅在低排放区域内将混合动力车辆1的行驶模式强制地设定为ev模式的地理围栏控制。在步骤s105之后,本控制例程结束。
87.另一方面,在步骤s104中判定为混合动力车辆1的位置在低排放区域外的情况下,本控制例程进入步骤s106。在步骤s106中,动力输出部18根据混合动力车辆1的车辆状态(要求输出、蓄电池24的soc等)选择行驶模式。在步骤s106之后,本控制例程结束。
88.另外,在步骤s102中判定为位置信息的可靠度为基准值tref以下的情况下,本控制例程进入步骤s107。在步骤s107中,动力输出部18停止地理围栏控制。
89.接着,在步骤s108中,动力输出部18执行使内燃机6的输出降低的输出降低控制。例如,与位置信息的可靠度高于基准值tref时相比,动力输出部18降低内燃机6的输出的上限值。由此,能够抑制在低排放区域内驱动了内燃机6时的废气排放的恶化。另外,也可以是与位置信息的可靠度高于基准值tref时相比,动力输出部18降低混合动力车辆1的行驶模式从ev模式切换到hv模式时的蓄电池24的soc的值。由此,能够减少在低排放区域内驱动内燃机6的频度。在步骤s108之后,本控制例程结束。
90.另外,在步骤s101中,可靠度计算部16也可以基于gnss接收机2的接收状况来计算位置信息的可靠度。在该情况下,例如,可靠度计算部16基于由gnss接收机2捕捉到的定位卫星的数量来计算位置信息的可靠度,在由gnss接收机2捕捉到的定位卫星的数量为规定数量(例如2或3)以下时,将位置信息的可靠度计算为基准值tref以下的值。另外,可靠度计算部16也可以基于与gnss接收机2相关的dop(dilution of precision:精度降低率)的值来计算位置信息的可靠度,并在dop的值为规定值以上时,将位置信息的可靠度计算为基准值tref以下的值。在该情况下,作为dop的值,例如使用hdop(水平精度降低率)和vdop(垂直精度降低率)中的任一方的值、或者hdop及vdop的值的平均值。
91.另外,在因时间的经过等而消除定位卫星的轨道信息后再启动gnss接收机2(所谓冷启动)的状态下,为了捕捉定位卫星并接收电波需要时间。因此,可靠度计算部16也可以在向gnss接收机2的电力供给停止了规定时间以上时,将位置信息的可靠度计算为基准值tref以下的值。规定时间被设定为从停止向gnss接收机2的电力供给起到消除定位卫星的轨道信息为止的时间。即,可靠度计算部16也可以在实施了gnss接收机2的冷启动时将位置信息的可靠度计算为基准值tref以下的值。
92.另外,当混合动力车辆1由渡轮、车辆搬运车等运输时,无法使用自主导航来推定混合动力车辆1的位置。因此,可靠度计算部16也可以在混合动力车辆1被输送时将位置信息的可靠度计算为基准值tref以下的值。
93.在紧接混合动力车辆1的输送之后,也能够基于gnss接收机2的输出来掌握混合动力车辆1的大致位置。因此,例如基于gnss接收机2的输出来判别混合动力车辆1被输送的情况。在gnss接收机2再启动时混合动力车辆1的位置大幅移动的情况下,判定为混合动力车辆1被输送。另外,也可以基于由导航装置4设定的行驶路线来判别混合动力车辆1由渡轮输送的情况。
94.另外,当在立体停车场那样的场所中混合动力车辆1的行进方向由转台变更时,在通过自主导航而推定出的混合动力车辆1的位置与实际的位置之间产生偏差。因此,可靠度计算部16也可以在混合动力车辆1的行进方向由转台变更时将位置信息的可靠度计算为基准值tref以下的值。例如,将与停车场相关的信息(有无转台等)存储于地图数据库3的地图信息,在混合动力车辆1停在具有转台的停车场时,判定为混合动力车辆1的行进方向由转台变更。
95.另外,存在由驾驶员等带入混合动力车辆1的移动终端(例如智能手机、平板终端、笔记本电脑等)通过有线或无线与混合动力车辆1(具体而言为ecu10)电连接的情况。在该情况下,可靠度计算部16也可以在由位置推定部15推定出的混合动力车辆1的位置与由移动终端检测出的混合动力车辆1的位置之间的距离为规定距离以上时,将位置信息的可靠度计算为基准值tref以下的值。
96.另外,作为车辆位置检测装置,混合动力车辆1也可以具备如图5所示的路车间通信机20来代替gnss接收机2。路车间通信机20与ecu10电连接,能够使用规定的频带进行混合动力车辆1与路侧机80之间的通信。在该情况下,例如,位置推定部15使用地图数据库3的地图信息、与路侧机80通信的通信结果及公知的自主导航(推测导航)来推定混合动力车辆1的位置。即,位置推定部15基于地图数据库3的地图信息及与路侧机80通信的通信结果来确定地图上的基准点(基点),并基于车速传感器、陀螺传感器等传感器5的输出来计算混合动力车辆1相对于基准点的移动距离和移动方向,由此推定混合动力车辆1的位置。
97.在将路车间通信机20用作车辆位置检测装置的情况下,在步骤s101中,例如可靠度计算部16判定路车间通信机20有无故障,在检测出路车间通信机20的故障时,将位置信息的可靠度计算为基准值tref以下的值(例如0)。在该情况下,例如,在路车间通信机20的输出由于配线的断线等而未发送到ecu10的情况下等,可靠度计算部16判定为路车间通信机20发生了故障。另外,可靠度计算部16也可以在混合动力车辆1的行驶过程中在规定时间以上未进行与路侧机80的通信的情况下,将位置信息的可靠度计算为基准值tref以下的值。
98.另外,动力输出部18也可以在位置信息的可靠度为基准值tref以下时,与位置信息的可靠度高于基准值tref时相比,使内燃机6的输出降低且使电动马达7的输出增加。在该情况下,例如在步骤s108中,与位置信息的可靠度高于基准值tref时相比,动力输出部18降低内燃机6的输出相对于要求输出的比例且提高电动马达7的输出相对于要求输出的比例。由此,能够抑制在低排放区域中驱动了内燃机6时的废气排放的恶化,并且抑制由内燃机6的输出降低引起的混合动力车辆1的加速性能的降低等。
99.另外,动力输出部18在使内燃机6的输出降低时,也可以使内燃机6的输出为0。即,动力输出部18也可以在位置信息的可靠度为基准值tref以下时,使内燃机6停止而仅通过电动马达7输出行驶用的动力。在该情况下,在步骤s108中,动力输出部18将混合动力车辆1的行驶模式设定为ev模式。由此,能够抑制在低排放区域内驱动内燃机6的情况。
100.《第二实施方式》
101.第二实施方式所涉及的混合动力车辆的控制装置除了以下说明的点以外,基本上与第一实施方式所涉及的混合动力车辆的控制装置相同。因此,以下以与第一实施方式不同的部分为中心对本发明的第二实施方式进行说明。
102.图6是概略地表示本发明的第二实施方式所涉及的混合动力车辆1’的结构的图。如图6所示,混合动力车辆1’除了gnss接收机2、地图数据库3、导航装置4、传感器5、内燃机6、电动马达7及ecu10之外,还具备hmi(human machine interface:人机接口)8。gnss接收机2、地图数据库3、导航装置4、传感器5、内燃机6、电动马达7及hmi8经由遵照can等标准的车内网络与ecu10以能够通信的方式连接。
103.hmi8在混合动力车辆1’与混合动力车辆1’的乘员(例如驾驶员)之间进行信息的输入输出。hmi8例如包括显示信息的显示器、产生声音的扬声器、供乘员进行输入操作的操作按钮或操作开关、接收乘员的声音的麦克风等。hmi8的显示器包括触摸屏、平视显示器、数字仪表面板等。ecu10的输出经由hmi8通知给乘员,来自乘员的输入经由hmi8发送给ecu10。hmi8是输入装置、输出装置或输入输出装置的一例。另外,hmi8也可以与导航装置4为一体。
104.如上所述,在位置信息的可靠度为基准值以下时,与位置信息的可靠度高于基准值时相比,动力输出部18使内燃机6的输出降低。但是,如果与混合动力车辆1’的乘员的意思无关地强制性地使内燃机6的输出降低,则乘员有可能对车辆1’的行为感到不安。
105.因此,在第二实施方式中,在由于位置信息的可靠度的降低而使内燃机6的输出降低的情况下,动力输出部18经由hmi8向混合动力车辆1’的乘员(例如驾驶员)通知由可靠度的降低引起的内燃机6的输出降低。由此,混合动力车辆1’中的输出控制的变更被明示给混合动力车辆1’的乘员,因此能够提高混合动力车辆1’的乘员的安心感。
106.另外,在混合动力车辆1’行驶于低排放区域的可能性低的情况下,例如混合动力车辆1’在不存在低排放区域的区域行驶的情况下,使内燃机6的输出降低的必要性低。另外,考虑到即使混合动力车辆1’在低排放区域附近行驶,混合动力车辆1’的乘员也不希望内燃机6的输出降低的情况。
107.因此,在第二实施方式中,在混合动力车辆1’的乘员(例如驾驶员)向hmi8输入了内燃机6的输出降低的解除的情况下,动力输出部18解除由位置信息的可靠度的降低引起的内燃机6的输出降低。即,动力输出部18根据混合动力车辆1’的乘员的要求,解除由位置信息的可靠度的降低引起的内燃机6的输出降低。由此,能够避免与混合动力车辆1’的乘员的意思相反地继续内燃机6的输出降低的情况。
108.《行驶模式设定处理》
109.以下,使用图7及图8的流程图对上述的控制进行详细说明。图7是表示本发明的第二实施方式中的行驶模式设定处理的控制例程的流程图。本控制例程由ecu10以规定的执行间隔反复执行。
110.步骤s201及s202与图4的步骤s101及s102同样地执行,在步骤s202中判定为位置信息的可靠度高于基准值tref的情况下,本控制例程进入步骤s203。在步骤s203中,动力输出部18将可靠度降低标志frr设定为0。另外,混合动力车辆1’的点火开关被接通时的可靠度降低标志frr的初始值为0。在步骤s203之后,步骤s204~s207与图4的步骤s103~s106同样地执行。
111.另一方面,在步骤s202中判定为位置信息的可靠度为基准值tref以下的情况下,本控制例程进入步骤s208。在步骤s208中,动力输出部18将可靠度降低标志frr设定为1。
112.接着,在步骤s209中,动力输出部18判定可靠度降低标志frr是否从0变更为1、即位置信息的可靠度是否从比基准值tref高的值变化为基准值tref以下的值。在判定为可靠度降低标志frr从0变更为1的情况下,本控制例程进入步骤s210。
113.在步骤s210中,动力输出部18将解除标志fc复位为0。在步骤s210之后,本控制例程进入步骤s211。另一方面,在步骤s209中判定为可靠度降低标志frr维持为1的情况下,本控制例程跳过步骤s210而进入步骤s211。
114.在步骤s211中,动力输出部18判定解除标志fc是否为1。在判定为解除标志fc为0的情况下、即混合动力车辆1’的乘员未要求内燃机6的输出降低的解除的情况下,本控制例程进入步骤s212。
115.在步骤s212中,与图4的步骤s107同样地,动力输出部18停止地理围栏控制。接着,在步骤s213中,与图4的步骤s108同样地,动力输出部18执行使内燃机6的输出降低的输出降低控制。
116.接着,在步骤s214中,动力输出部18经由hmi8向混合动力车辆1’的乘员通知由位置信息的可靠度的降低引起的内燃机6的输出降低。例如,动力输出部18将表示由位置信息的可靠度的降低引起的内燃机6的输出降低的文字信息显示于hmi8。另外,动力输出部18也可以在文字信息的基础上或代替文字信息,向hmi8输出表示由位置信息的可靠度的降低引起的内燃机6的降低的声音信息。即,动力输出部18经由hmi8以视觉或听觉的方式向混合动力车辆1’的乘员通知由位置信息的可靠度的降低引起的内燃机6的输出降低。
117.另外,动力输出部18也可以除了向混合动力车辆1’的乘员通知由位置信息的可靠度的降低引起的内燃机6的输出降低之外,还向混合动力车辆1’的乘员通知由于位置信息的可靠度的降低而进行的地理围栏控制的停止。图9是表示在由于位置信息的可靠度的降低而使内燃机6的输出降低时显示于hmi8的画面的一例的图。在步骤s214之后,本控制例程结束。
118.另一方面,在步骤s211中判定为解除标志fc为1的情况下、即混合动力车辆1’的乘员要求了内燃机6的输出降低的解除的情况下,本控制例程进入步骤s207。在步骤s207中,动力输出部18解除内燃机6的输出降低,并根据混合动力车辆1的车辆状态(要求输出、蓄电池24的soc等)选择行驶模式。在步骤s207之后,本控制例程结束。
119.《解除要求确认处理》
120.图8是表示本发明的第二实施方式中的解除要求确认处理的控制例程的流程图。本控制例程由ecu10以规定的执行间隔反复执行。
121.首先,在步骤s301中,动力输出部18判定混合动力车辆1’的乘员是否要求了内燃机6的输出降低的解除。由位置信息的可靠度的降低引起的内燃机6的输出降低被通知给混
合动力车辆1’的乘员,混合动力车辆1’的乘员经由hmi8要求内燃机6的输出降低的解除。例如,如图9所示,在hmi8显示解除按钮,混合动力车辆1’的乘员通过选择解除按钮来要求内燃机6的输出降低的解除。另外,混合动力车辆1’的乘员也可以通过将声音输入到hmi8来要求内燃机6的输出降低的解除。
122.在步骤s301中判定为未要求内燃机6的输出降低的解除的情况下,本控制程序结束。另一方面,在步骤s301中判定为要求了内燃机6的输出降低的解除的情况下,本控制例程进入步骤s302。在步骤s302中,动力输出部18将解除标志fc设定为1。在步骤s302之后,本控制例程结束。
123.另外,图7的控制例程可以与图4的控制例程同样地变形。例如,在步骤s213中,动力输出部18也可以将混合动力车辆1’的行驶模式设定为ev模式。在该情况下,在步骤s214中,动力输出部18经由hmi8以视觉或听觉的方式向混合动力车辆1’的乘员通知由于位置信息的可靠度的降低而进行的行驶模式的设定。图10是表示在由于位置信息的可靠度的降低而将行驶模式设定为ev模式时显示于hmi8的画面的一例的图。在该情况下,混合动力车辆1’的乘员通过选择解除按钮来要求行驶模式的设定的解除。另外,混合动力车辆1’的乘员也可以通过将声音输入到hmi8来要求行驶模式的设定的解除。
124.《第三实施方式》
125.第三实施方式所涉及的混合动力车辆的控制装置除了以下说明的点以外,基本上与第一实施方式所涉及的混合动力车辆的控制装置相同。因此,以下以与第一实施方式不同的部分为中心对本发明的第三实施方式进行说明。
126.如上所述,如果位置信息的可靠度降低,则由于位置的误识别,存在尽管混合动力车辆1的位置在低排放区域内,但内燃机6被驱动的可能。特别是,当混合动力车辆1在低排放区域附近行驶时,有可能产生这样的不良情况。另一方面,即使混合动力车辆1的位置处于低排放区域内,在能够从蓄电池24供给到电动马达7的电力不足时,也难以仅通过电动马达7的输出使混合动力车辆1行驶。
127.因此,在第三实施方式中,在混合动力车辆1的位置处于低排放区域附近且蓄电池24的soc为下限阈值以上的情况下,当混合动力车辆1的位置信息的可靠度为基准值以下时,动力输出部18使内燃机6停止而仅通过电动马达7输出行驶用的动力。即,在混合动力车辆1的位置处于低排放区域附近且蓄电池24的soc为下限阈值以上的情况下,当混合动力车辆1的位置信息的可靠度为基准值以下时,动力输出部18将混合动力车辆1的行驶模式设定为ev模式。由此,能够抑制在误识别了混合动力车辆1的位置时在低排放区域内驱动内燃机6的情况。
128.《行驶模式设定处理》
129.以下,使用图11的流程图对上述的控制进行详细说明。图11是表示本发明的第三实施方式中的行驶模式设定处理的控制例程的流程图。本控制例程由ecu10以规定的执行间隔反复执行。
130.首先,在步骤s401中,充电率计算部17基于由soc传感器5a检测出的蓄电池24的状态量(电压、电流等),通过公知的方法来计算蓄电池24的soc。
131.接着,在步骤s402中,动力输出部18判定由充电率计算部17计算出的蓄电池24的soc是否为下限阈值soc
lth
以上。下限阈值soc
lth
是考虑蓄电池24的劣化等而预先确定的。另
外,下限阈值soc
lth
被设定为比在低排放区域之外的场所中由于蓄电池24的soc的降低而将行驶模式从ev模式切换为hv模式时的值小的值。
132.在步骤s402中判定为蓄电池24的soc小于下限阈值soc
lth
的情况下,本控制例程进入步骤s403。在步骤s403中,动力输出部18为了提高蓄电池24的soc而将混合动力车辆1的行驶模式设定为hv模式。即,动力输出部18驱动内燃机6,通过内燃机6输出行驶用的动力。
133.另一方面,在步骤s402中判定为蓄电池24的soc为下限阈值soc
lth
以上的情况下,本控制例程进入步骤s404。在步骤s404中,与图4的步骤s103同样地,位置推定部15基于gnss接收机2的输出来推定混合动力车辆1的位置(当前位置)。
134.接着,在步骤s405中,与图4的步骤s101同样地,可靠度计算部16计算位置信息的可靠度。接着,在步骤s406中,与图4的步骤s102同样地,动力输出部18判定由可靠度计算部16计算出的位置信息的可靠度是否为基准值tref以下。
135.在步骤s406中判定为位置信息的可靠度比基准值tref高的情况下,本控制例程进入步骤s407。在步骤s407中,与图4的步骤s104同样地,动力输出部18判定由位置推定部15推定出的混合动力车辆1的位置是否在低排放区域内。
136.在步骤s407中判定为混合动力车辆1的位置在低排放区域外的情况下,本控制例程进入步骤s408。在步骤s408中,动力输出部18根据混合动力车辆1的车辆状态(要求输出、蓄电池24的soc等)选择行驶模式。在步骤s408之后,本控制例程结束。
137.另一方面,在步骤s407中判定为混合动力车辆1的位置在低排放区域内的情况下,本控制例程进入步骤s409。在步骤s409中,动力输出部18将行驶模式设定为ev模式。即,动力输出部18与要求输出无关地使内燃机6停止,仅通过电动马达7输出行驶用的动力。在步骤s409之后,本控制例程结束。
138.另外,在步骤s406中判定为位置信息的可靠度为基准值tref以下的情况下,本控制例程进入步骤s410。在步骤s410中,动力输出部18判定混合动力车辆1的位置是否在低排放区域附近。例如,在位置信息的可靠度比基准值tref高时由位置推定部15最后推定出的混合动力车辆1的位置与低排放区域(例如低排放区域的中心位置)之间的距离为规定距离以下的情况下,动力输出部18判定为混合动力车辆1的位置在低排放区域附近。
139.另外,动力输出部18也可以在由导航装置4设定的行驶路线上的至少一个地点与低排放区域(例如低排放区域的中心位置)之间的距离为规定距离以下的情况下,判定为混合动力车辆1的位置在低排放区域附近。另外,动力输出部18也可以基于vics(注册商标)(vehicle information and communication system:道路交通信息通信系统)信息那样的来自外部的接收信息,来判定混合动力车辆1的位置是否在低排放区域附近。
140.在步骤s410中判定为混合动力车辆1的位置在低排放区域附近的情况下,本控制例程进入步骤s409。在步骤s409中,动力输出部18将行驶模式设定为ev模式。即,动力输出部18与要求输出无关地使内燃机6停止,仅通过电动马达7输出行驶用的动力。在步骤s409之后,本控制例程结束。
141.另一方面,在步骤s410中判定为混合动力车辆1的位置不在低排放区域附近的情况下,本控制例程进入步骤s411。在步骤s411中,动力输出部18根据混合动力车辆1的车辆状态(要求输出、蓄电池24的soc等)选择行驶模式。在步骤s411之后,本控制例程结束。
142.《第四实施方式》
143.第四实施方式所涉及的混合动力车辆的控制装置除了以下说明的点以外,基本上与第三实施方式所涉及的混合动力车辆的控制装置相同。因此,以下以与第三实施方式不同的部分为中心对本发明的第四实施方式进行说明。
144.图12是包括本发明的第四实施方式所涉及的混合动力车辆1”的客户端服务器系统100的概略结构图。客户端服务器系统100具备混合车辆1”和服务器40。服务器40能够与包括混合动力车辆1”在内的多个车辆进行通信。
145.如图12所示,服务器40设置于混合动力车辆1”的外部,具备通信接口41、存储装置42、存储器43及处理器44。服务器40还可以具备如键盘和鼠标那样的输入装置、如显示器那样的输出装置等。另外,服务器40也可以由多个计算机构成。
146.通信接口41能够与混合动力车辆1”进行通信,使服务器40能够与混合动力车辆1”进行通信。具体而言,通信接口41具有用于将服务器40与通信网络50连接的接口电路。服务器40经由通信接口41、通信网络50及无线基站60与混合动力车辆1”进行通信。
147.存储装置42例如具有硬盘驱动器(hdd)、固态驱动器(ssd)、光学记录介质等。存储装置42存储各种数据,例如存储用于处理器44执行各种处理的计算机程序等。
148.存储器43具有例如随机存取存储器(ram)那样的半导体存储器。存储器43存储例如在由处理器44执行各种处理时使用的各种数据等。
149.通信接口41、存储装置42及存储器43经由信号线与处理器44连接。处理器44具有一个或多个cpu及其外围电路,并执行各种处理。另外,处理器44也可以还具有如逻辑运算单元或数值运算单元那样的运算电路。
150.图13是概略地表示本发明的第四实施方式所涉及的混合动力车辆1”的结构的图。如图13所示,混合动力车辆1”除了gnss接收机2、地图数据库3、导航装置4、传感器5、内燃机6、电动马达7及ecu10以外,还具备通信模块9。gnss接收机2、地图数据库3、导航装置4、传感器5、内燃机6、电动马达7及通信模块9经由遵照can等标准的车内网络与ecu10以能够通信的方式连接。
151.通信模块9是能够使混合动力车辆1”与混合动力车辆1”的外部之间进行通信的设备。通信模块9例如是能够经由无线基站60与通信网络50进行通信的数据通信模块(dcm:data communication module)。另外,通信模块9也可以内置于导航装置4。
152.在第四实施方式中,混合动力车辆1”从服务器40接收混合动力车辆1”的位置信息。例如,低排放区域的位置信息被存储于服务器40的存储装置42,服务器40从混合动力车辆1”接收混合动力车辆1”的位置,并将混合动力车辆1”的位置是否在低排放区域内的信息发送到混合动力车辆1”。
153.《行驶模式设定处理》
154.图14是表示本发明的第四实施方式中的行驶模式设定处理的控制例程的流程图。本控制例程由ecu10以规定的执行间隔反复执行。
155.步骤s501~s504与图11的步骤s401~s404同样地执行。在步骤s504之后,在步骤s505中,位置推定部15将推定出的混合动力车辆1”的位置发送到服务器40。
156.接着,在步骤s506中,动力输出部18从服务器40接收混合动力车辆1”的位置信息。例如,动力输出部18从服务器40接收混合动力车辆1”的位置是否在低排放区域内的信息。另外,动力输出部18也可以从服务器40接收低排放区域的位置信息。另外,动力输出部18也
可以从服务器40接收在混合动力车辆1”的位置处推荐的行驶模式。在该情况下,服务器40在判定为混合动力车辆1”的位置处于低排放区域内的情况下,选择ev模式作为推荐的行驶模式。
157.接着,在步骤s507中,与图11的步骤s405同样地,可靠度计算部16计算位置信息的可靠度。此外,在第四实施方式中,可靠度计算部16在混合动力车辆1”与服务器40之间的通信被切断时,判定为位置信息的可靠度为基准值tref以下。例如,可靠度计算部16在步骤s505及步骤s506中的至少一方中发生了通信错误的情况下,判定为位置信息的可靠度为基准值tref以下。
158.接着,在步骤s508中,与图11的步骤s406同样地,动力输出部18判定由可靠度计算部16计算出的位置信息的可靠度是否为基准值tref以下。
159.在步骤s508中判定为位置信息的可靠度比基准值tref高的情况下,本控制例程进入步骤s509。在步骤s509中,动力输出部18基于从服务器40接收到的位置信息,来判定混合动力车辆1”的位置是否在低排放区域内。在判定为混合动力车辆1”的位置在低排放区域外的情况下,本控制例程进入步骤s510,在判定为混合动力车辆1”的位置在低排放区域内的情况下,本控制例程进入步骤s511。
160.步骤s510~步骤s513与图11的步骤s408~步骤s411同样地执行。
161.以上,说明了本发明所涉及的优选实施方式,但本发明并不限定于这些实施方式,可以在权利要求书的记载内实施各种修正和变更。
162.例如,与混合动力车辆1、1’、1”电连接的移动终端(例如智能手机、平板终端、笔记本电脑等)也可以具有gnss接收机2、地图数据库3及导航装置4的功能。另外,在该情况下,也可以说混合动力车辆1、1’、1”具备gnss接收机2、地图数据库3及导航装置4。
163.另外,充电端口25及充电器26也可以从混合动力车辆1、1’、1”省略。即,混合动力车辆1、1’、1”也可以是不由外部电源对蓄电池24进行充电的类型的混合动力车辆。另外,图2所示的混合动力车辆1是所谓的串并联式混合动力车辆,但只要混合动力车辆1、1’、1”能够在不驱动内燃机的情况下行驶,则也可以是串联式、并联式等其他种类的混合动力车辆。
164.另外,上述实施方式可以任意组合来实施。例如,在第一实施方式或第二实施方式中,也可以如第四实施方式那样,混合动力车辆1”从服务器40接收混合动力车辆1”的位置信息,可靠度计算部16在混合动力车辆1”与服务器40之间的通信被切断时判定为位置信息的可靠度为基准值以下。另外,在第三实施方式或第四实施方式中,也可以如第二实施方式那样,动力输出部18经由hmi8向混合动力车辆1’的乘员通知由于位置信息的可靠度的降低而进行的行驶模式的设定,并根据混合动力车辆1’的乘员的要求来解除由于位置信息的可靠度的降低而进行的行驶模式的设定。
165.标号说明
166.1、1’、1
”ꢀ
混合动力车辆
167.2 gnss接收机
168.6 内燃机
169.7 电动马达
170.10 电子控制单元(ecu)
171.15 位置推定部
172.16 可靠度计算部
173.17 充电率计算部
174.18 动力输出部
175.20 路车间通信机
176.24 蓄电池
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
