1.本公开总体上涉及车辆传感器。
背景技术:
2.汽车工程师协会(sae)已经定义了多个级别的自主车辆操作。在级别0-级别2,人类驾驶员常常在没有车辆的帮助下监测或控制大部分驾驶任务。例如,在级别0(“无自动化”),人类驾驶员负责所有车辆操作。在级别1(“驾驶员辅助”),车辆有时辅助转向、加速或制动,但驾驶员仍然负责绝大部分的车辆控制。在级别2(“部分自动化”),车辆可在某些情形下在没有人类交互的情况下控制转向、加速和制动。在级别3-级别5,车辆承担更多的驾驶相关任务。在级别3(“条件性自动化”),车辆可在某些情形下处置转向、加速和制动,以及对驾驶环境的监测。然而,级别3偶尔需要驾驶员干预。在级别4(“高度自动化”),车辆可处置与在级别3相同的任务,但不依赖于驾驶员在某些驾驶模式下进行干预。在级别5(“完全自动化”),车辆可处置几乎所有任务而不需要任何驾驶员干预。
3.诸如自主或半自主车辆等车辆通常包括多种传感器。一些传感器检测外部世界,所述传感器例如雷达传感器、扫描激光测距仪、光探测和测距(激光雷达)装置以及图像处理传感器(诸如,相机)。激光雷达装置通过发射激光脉冲并测量脉冲行进到物体并返回的飞行时间来检测与物体的距离。一些传感器是通信装置,例如车辆对基础设施(v2i)或车辆对车辆(v2v)装置。传感器操作可能受到障碍物(例如,灰尘、雪、昆虫等)以及由环境致使的传感器窗口或透镜的特征劣化的影响。
技术实现要素:
4.一种总成包括底座。所述总成包括物体检测传感器。所述总成包括在所述物体检测传感器前方从所述底座向上延伸的偏转器。所述偏转器被配置为引导冲压空气远离所述物体检测传感器。所述总成包括由所述偏转器支撑并瞄准所述物体检测传感器的喷嘴。
5.所述偏转器可包括:第一偏转表面,所述第一偏转表面被配置为在物体检测传感器的上方和右侧引导冲压空气;以及第二偏转表面,所述第二偏转表面被配置为在物体检测传感器的上方和左侧引导冲压空气。
6.所述第一偏转表面和所述第二偏转表面可能是凹形的。
7.所述偏转器可包括后表面,并且所述喷嘴可在所述后表面处。
8.所述后表面可具有峰部,并且所述喷嘴可在所述峰部处。
9.所述偏转器可包括从所述偏转器的前部延伸到所述峰部的顶部边缘。
10.所述偏转器可沿着车辆纵向轴线与物体检测传感器间隔开。
11.所述偏转器可沿着车辆纵向轴线伸长。
12.所述偏转器可包括沿着车辆纵向轴线延伸的顶部边缘。
13.所述顶部边缘可以是凸形的。
14.所述总成可包括与喷嘴流体连通的流体传递系统。
15.流体传递系统可向喷嘴提供空气和液体。
16.所述总成可包括与喷嘴流体连通的第二流体传递系统。
17.所述总成可包括沿着横向轴线与所述物体检测传感器间隔开的第二物体检测传感器,其中所述物体检测传感器和所述第二物体检测传感器是被定向成收集立体图像的相机。
18.所述总成可包括支撑在所述第二物体检测传感器前方的第二偏转器。
19.所述总成可包括由所述第二偏转器支撑并瞄准所述第二物体检测传感器的第二喷嘴。
20.所述物体检测传感器可限定具有横向中心的视野,并且所述偏转器可在所述视野的所述横向中心处。
21.偏转器可限定湍流区,并且物体检测传感器可在湍流区中。
22.所述底座可以是车辆车顶,并且偏转器可由车辆车顶支撑。
23.所述总成可包括传感器壳体,且所述物体检测传感器可由传感器壳体支撑。
附图说明
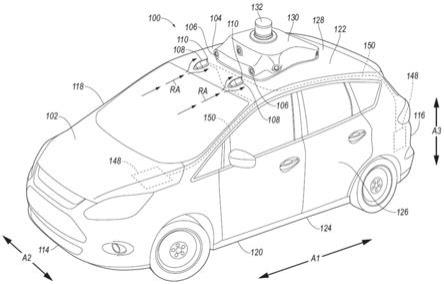
24.图1是具有传感器总成的车辆的透视图。
25.图2是车辆的具有传感器总成的车顶的透视图。
26.图3是传感器总成的偏转器的透视图。
27.图4是车辆的具有传感器总成的车顶的侧视图。
28.图5是车辆的具有传感器总成的车顶的俯视图。
具体实施方式
29.参考图1至图4,其中贯穿若干视图,相同的附图标记指示相同的部分,用于收集数据以自主地操作车辆102的总成100包括底座104。总成100包括一个或多个物体检测传感器106,诸如相机。总成100包括在所述物体检测传感器106前方从底座104向上延伸的一个或多个偏转器108。偏转器108被配置为引导冲压空气ra远离所述物体检测传感器106。喷嘴110由偏转器108中的每个支撑。使喷嘴110瞄准物体检测传感器106。
30.偏转器108和喷嘴110有助于维持物体检测传感器106的清晰视野fv。每个物体检测传感器106限定视野fv(在图4和图5中示出)。视野fv是相应的物体检测传感器106可从其检测到光或其他数据介质的体积。物体检测传感器106可具有穿过窗口112的视野fv。换句话说,光可穿过窗口112并被物体检测传感器106检测到。每个视野fv可具有横向中心lc。横向中心lc例如沿着车辆102的横向轴线a2通常与相应视野fv的右边缘和左边缘等距。
31.例如,空气传播的污染物(诸如,污垢、昆虫等)可被通过偏转器108引导的冲压空气ra推动远离物体检测传感器106。作为另一示例,喷嘴110可向物体检测传感器106的视野fv中的窗口112等提供清洗液。
32.车辆102可能是任何合适类型的汽车,例如乘用车或商用车,诸如四门轿车、双门小轿车、卡车、运动型多用途车、跨界车、厢式货车、小型货车、出租车、公共汽车等。例如,车辆102可以是自主车辆。换句话说,可自主地操作车辆102,以使得可在无须驾驶员持续注意的情况下驾驶车辆102,即车辆102可在没有人为输入的情况下自驾驶。
33.车辆102限定在车辆102的前部114与后部116之间延伸的纵向轴线a1。车辆102限定在车辆102的右侧118与左侧120之间延伸的横向轴线a2。车辆102限定在车辆102的顶部122与底部124之间延伸的竖直轴线v3。纵向轴线a1、横向轴线a2和竖直轴线v3可彼此垂直。
34.车辆102可包括车身126。车身126包括部分地限定车辆102的外部的车身面板。车身126面板可呈现a级表面,例如暴露于客户视线并且没有不美观的瑕疵和缺陷的成品表面。车身126面板包括例如车顶128等。
35.车辆102可包括传感器壳体130。传感器壳体130可附接到车辆102,例如可附接到车辆102的车身面板中的一个(例如,车顶128)。物体检测传感器106和其他传感器132由传感器壳体130支撑和/或安置在所述传感器壳体中。传感器壳体130可包围并保护物体检测传感器106和传感器132的操作部件。传感器壳体130可被成形为可附接到车顶128,例如可具有匹配车顶128的轮廓的形状。传感器壳体130可附接到车顶128,这可为物体检测传感器106和其他传感器132提供围绕车辆102的区域的无障碍视野fv。传感器壳体130可由例如塑料或金属形成。
36.传感器壳体130可包括一个或多个窗口112。窗口112可相对于传感器壳体130固定并安装至所述传感器壳体。窗口112相对于物体检测传感器106和/或其他传感器132能够检测到的介质(例如,可见光)是透明的。例如,窗口112可能是例如附接至乙烯层的两层玻璃;聚碳酸酯等。
37.物体检测传感器106可包括诸如已知的例如从相应的视野fv向车辆计算机提供指示检测到的物体的数据的多种装置。例如,物体检测传感器106可包括提供车辆周围的物体的相对位置、大小和形状的光探测和测距(激光雷达)传感器。作为另一示例,物体检测传感器106可包括雷达传感器,所述雷达传感器提供数据以指示物体、第二车辆等相对于所述车辆的位置的位置。替代地或另外,物体检测传感器106还可例如包括相机(例如,前视、侧视等),所述相机提供来自车辆周围的区域的图像。相机包括图像传感器,诸如ccd传感器或cmos传感器,以从由相机检测到的光生成数据。图像可在数据中被指定为具有不同颜色、亮度等值的像素阵列。物体检测传感器106可例如经由通信网络(诸如车辆总线等)向计算机提供数据。在本公开的情境中,物体是可通过能够由物体检测传感器106检测到的物理现象(例如,光或其他电磁波或声音等)来表示的物理(即,物质)物品。因此,车辆以及包括以下讨论的其他物品都落在本文的“物体”的定义内。
38.物体检测传感器106可包括沿着横向轴线a2彼此间隔开并且面向车辆102的前部114的一对相机,即作为前向相机。此一对相机可收集立体图像,例如用于确定从车辆102到由该一对相机检测到的立体图像中识别的物体的范围。
39.其他传感器132可包括诸如已知用于提供数据以用于自主地操作车辆102的多种装置。例如,其他传感器132可包括安置在车辆102的顶部122上、在车辆的前挡风玻璃后面、围绕车辆102等的光探测和测距(激光雷达)车辆传感器等,所述车辆传感器提供车辆102周围的物体的相对位置、大小和形状。作为另一示例,固定到车辆保险杠的一个或多个雷达车辆传感器可提供数据以提供物体、第二车辆等相对于车辆102的位置的位置。
40.参考图3至图5,偏转器108被配置为引导冲压空气ra远离所述物体检测传感器106。例如,每个物体检测传感器106可在由偏转器108中的相应一个限定的湍流区tp中(在下面进一步讨论)。一对偏转器108可沿着车辆102的横向轴线a2彼此间隔开,例如偏转器
108中的一个可在作为收集立体图像的相机的物体检测传感器106中的每个的前方。这样的一对偏转器108可在该一对物体检测传感器106的视野fv的横向中心lc处,例如偏转器108和横向中心lc可具有沿着车辆102的横向轴线a2的共同位置。偏转器108可沿着纵向轴线a1与物体检测传感器106间隔开,例如在车辆102的前部114与物体检测传感器106之间。偏转器108可沿着纵向轴线a1与传感器壳体130间隔开。偏转器108在所述物体检测传感器106前方从底座104向上延伸。支撑偏转器108的底座104可以是车辆102的车顶128或其他合适的结构。例如,偏转器108可从车顶128并且沿着竖直轴线v3远离车辆102的顶部122和底部124延伸。
41.转到图3至图5,每个偏转器108可包括后表面134。后表面134可沿着竖直轴线v3远离底座104延伸,例如延伸到后表面134的峰部136。后表面134的峰部136远离底座104。在其他情况下,峰部136可比后表面134的其余部分更远离底座104。后表面134可沿着横向轴线a2例如从偏转器108的右侧处的第一偏转表面140的后边缘138延伸到偏转器108的左侧处的第二偏转表面142的后边缘138。后表面134可面向车辆102的后部116。后表面134可面向传感器壳体130。换句话说,从后表面134正常延伸的线可例如沿着纵向轴线a1远离后表面134朝向车辆102的传感器壳体130和/或后部116延伸。
42.偏转器108可包括顶部边缘144。顶部边缘144例如相对于竖直轴线v3在偏转器108上的最上位置。顶部边缘144可例如沿着纵向轴线a1从偏转器108的前端146延伸到后表面134。顶部边缘144可沿着(即,平行于)纵向轴线a1伸长。顶部边缘144可以是凸形的。例如,顶部边缘144可从前端146弧形地延伸到后表面134,并且从偏转器108的中心(例如,质量、体积等的中心)向外弯曲。
43.第一偏转表面140被配置为在物体检测传感器106中的一个的上方和右侧引导冲压空气ra,并且第二偏转表面142被配置为在此物体检测传感器106的上方和左侧引导冲压空气ra,如图4和图5中所示。例如,第一偏转表面140和第二偏转表面142向冲击偏转器108的冲压空气ra施加法向力。冲压空气相对于车辆102移动,通常从车辆102的前部114朝向车辆102移动,并且此种空气移动是由车辆102沿着道路等向前行进致使的。由偏转器108施加的法向力可将冲压空气ra引导到物体检测传感器106的侧面和上方。
44.第一偏转表面和第二偏转表面142可从底座104延伸到顶部边缘144。第一偏转表面140可在顶部边缘144的相对侧上。换句话说,顶部边缘144可例如沿着横向轴线a2在第一偏转表面与第二偏转表面142之间。
45.第一偏转表面140和第二偏转表面142可以是凹形的。例如,第一偏转表面和第二偏转表面142可从底座104弧形地延伸到顶部边缘144,并且朝向偏转器108的中心(例如,质量、体积等的中心)弯曲。第一偏转表面140和第二偏转表面142的凹形形状可铲起冲压空气ra以将此空气重新引导至物体检测传感器106的侧面和上方。
46.每个偏转器108可沿着车辆102的纵向轴线a1伸长。换句话说,偏转器108沿着纵向轴线a1的长度可大于偏转器108沿着横向轴线a2的宽度和偏转器108沿着竖直轴线v3的高度。偏转器108的长度和宽度可在底座104处测量,例如在偏转器108的前端146与后表面134之间以及在第一偏转表面140与第二偏转表面142之间测量。偏转器108的高度可沿着竖直轴线v3在底座104与偏转器108的在底座104上方的顶部边缘144的最高点之间。
47.偏转器108限定湍流区tp。湍流区tp是具有比接近湍流区tp的空气相对更高的湍
流的空气的体积。例如,湍流区tp中的空气可具有比由偏转器108引导并与湍流区tp接界的冲压空气ra更高的湍流。例如,与相对较少湍流和更多层流的空气相比,湍流区tp中的湍流空气不太可能重新引导来自喷嘴110的流体。当车辆102在阈值速度范围(例如,每小时50公里至150公里)内行进时,可限定湍流区tp。阈值速度范围的下界可以是冲压空气ra可中断和/或重新引导来自喷嘴110的流体流的速度。阈值速度范围的上限可以是车辆102的由诸如在公共车行道上操作的法规等法规指定的最大预期行进速度,即车辆102预期行进的并且是基于车辆性能能力而确定的最大速度。可用风洞测试、计算机建模等来识别由偏转器108限定的湍流区tp。
48.一个或多个喷嘴110由偏转器108中的每个支撑。使每个喷嘴110瞄准物体检测传感器106中的一个,例如以使得由喷嘴110喷射的流体可接触相应的物体检测传感器106、此物体检测传感器106的前部114中的窗口112等。例如,一个喷嘴110可由偏转器108中的一个支撑并且瞄准相机中被定向成收集立体图像的一个相机,并且另一喷嘴110可由另一偏转器108支撑并且瞄准被定向成收集立体图像的另一相机。喷嘴110可被支撑在偏转器108的后表面134处,例如在峰部136处。换句话说,喷嘴110可在后表面134处支撑在第一偏转表面140与第二偏转表面142之间并且接近顶部边缘144。每个喷嘴110可指向车辆102的后部116并进入由支撑此喷嘴110的相应偏转器108限定的湍流区tp。例如,与湍流区tp外部的流体喷射相比,使喷嘴110指向湍流区tp可支持流体更准确地喷射到物体检测传感器106上。
49.一个或多个流体传递系统与喷嘴110流体连通,即向喷嘴110提供空气和/或液体,诸如清洗液。例如,一个流体传递系统148可接近车辆102的前部114,并且另一流体传递系统148可接近车辆102的后部116。流体传递系统中的每个可包括流体泵、空气压缩机、液体贮存器、加压存储罐、止回阀、电磁阀和/或其他合适的结构。流体传递系统可经由管件150和/或任何合适的结构与喷嘴110流体连通。流体传递系统可例如经由通信网络与计算机进行电子通信。流体传递系统可响应于来自计算机的命令而向喷嘴110中的一个或多个提供流体。
50.已经以说明性方式描述了本公开,并且应当理解,已经使用的术语意在具有描述性词语而非限制性词语的性质。鉴于以上教示,本公开的许多修改和变型是可能的,并且可以不同于具体描述的其他方式来实践本公开。
51.根据本发明,提供了一种部件,其具有:底座;物体检测传感器;偏转器,所述偏转器在所述物体检测传感器前方从所述底座向上延伸,所述偏转器被配置为引导冲压空气远离所述物体检测传感器;以及喷嘴,所述喷嘴由所述偏转器支撑并瞄准所述物体检测传感器。
52.根据一个实施例,偏转器包括:第一偏转表面,所述第一偏转表面被配置为在物体检测传感器的上方和右侧引导冲压空气;以及第二偏转表面,所述第二偏转表面被配置为在物体检测传感器的上方和左侧引导冲压空气。
53.根据一个实施例,所述第一偏转表面和所述第二偏转表面是凹形的。
54.根据一个实施例,所述偏转器包括后表面,所述喷嘴在所述后表面处。
55.根据一个实施例,所述后表面具有峰部,所述喷嘴在所述峰部处。
56.根据一个实施例,所述偏转器包括从所述偏转器的前部延伸到所述峰部的顶部边缘。
57.根据一个实施例,所述偏转器沿着车辆纵向轴线与物体检测传感器间隔开。
58.根据一个实施例,所述偏转器沿着车辆纵向轴线伸长。
59.根据一个实施例,所述偏转器包括沿着车辆纵向轴线延伸的顶部边缘。
60.根据一个实施例,顶部边缘是凸形的。
61.根据一个实施例,以上发明的特征还在于与所述喷嘴流体连通的流体传递系统。
62.根据一个实施例,流体传递系统向喷嘴提供空气和液体。
63.根据一个实施例,以上发明的特征还在于与喷嘴流体连通的第二流体传递系统。
64.根据一个实施例,以上发明的特征还在于沿着横向轴线与所述物体检测传感器间隔开的第二物体检测传感器,其中所述物体检测传感器和所述第二物体检测传感器是被定向成收集立体图像的相机。
65.根据一个实施例,以上发明的特征还在于支撑在所述第二物体检测传感器前方的第二偏转器。
66.根据一个实施例,以上发明的特征还在于由所述第二偏转器支撑并且瞄准所述第二物体检测传感器的第二喷嘴。
67.根据一个实施例,所述物体检测传感器限定具有横向中心的视野,并且所述偏转器可在所述视野的所述横向中心处。
68.根据一个实施例,偏转器限定湍流区,并且其中物体检测传感器在湍流区中。
69.根据一个实施例,底座是车辆车顶,偏转器由车辆车顶支撑。
70.根据一个实施例,以上发明的特征还在于传感器壳体,所述物体检测传感器由传感器壳体支撑。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。