1.本发明涉及车载致动器控制方法以及车载致动器控制装置。
背景技术:
2.在jp2015-38516a中提出了根据行驶中的轮胎的振动的时间序列波形而对路面状态进行推定的路面状态推定方法。
技术实现要素:
3.上述jp2015-38516a所记载的用于已有的路面状态的推定的轮胎的振动的时间序列波形中,包含因作用于车轮的外部干扰要素(机械制动器的动作或者车轮的滑动等)而引起的微小振动。因该外部干扰要素而难以从上述时间序列波形提取准确地表示路面状态的波形成分,因此路面状态的推定精度降低。
4.另一方面,本发明的发明人进行了潜心研究,结果开发出了如下控制方法,即,根据路面状态对所谓路噪(因路面与轮胎之间的碰撞或者摩擦而产生的噪声)的大小进行推定,在路噪增大的定时(timing)提高作为噪声源的车载致动器(压缩机、风扇以及发动机等)的输出,减弱因噪声对乘员造成的不悦感。
5.然而,在如上所述已有的路面状态的推定方法中,在因作用于车轮的外部干扰要素而产生误差时,路噪大小的推定值也有可能产生误差。如果利用这样产生了误差的推定值,则尽管实际上路噪的大小较小也会使得车载致动器的输出增大,有可能因噪声对乘员造成不悦感。
6.因此,本发明的目的在于,更可靠地防止因与车载致动器的动作相伴的噪声对乘员造成不悦感的情况。
7.本发明的车辆的控制方法是对作为噪声源的车载致动器的动作进行控制的车载致动器控制方法,包含如下工序:根据车辆的车轮的角加速度或者与其相关的参数而对使得路噪的大小实现数值化的路噪值进行推定的路噪值推定工序;判定路噪值的推定状态是否为适当的适当推定状态的推定状态判定工序;基于路噪值以及推定状态而判定车辆的背景噪声处于相对较大的高背景噪声状态还是相对较小的低背景噪声状态的背景噪声状态判定工序;以及根据所判定出的车辆的背景噪声的状态而对车载致动器的输出进行调节的输出调节工序。特别地,在背景噪声状态判定工序中,在判断为推定状态是适当推定状态的情况下,根据路噪值和规定阈值的大小而判定车辆的背景噪声处于高背景噪声状态还是低背景噪声状态。而且,在判断为推定状态并非适当推定状态的情况下,无论路噪值如何都判断为车辆的背景噪声处于低背景噪声状态。并且,在输出调节工序中,在判断为车辆的背景噪声处于所述高背景噪声状态的情况下,以使得与车载致动器的动作相伴的噪声相对增大的方式设定该车载致动器的输出。另一方面,在判断为车辆的背景噪声处于低背景噪声状态的情况下,以使得与车载致动器的动作相伴的噪声相对减小的方式设定该车载致动器的输出。
附图说明
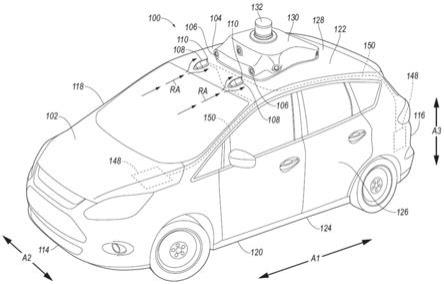
8.图1是对执行本发明的实施方式所涉及的车载致动器控制方法的串联混合动力车辆的结构进行说明的图。
9.图2是表示执行车载致动器控制方法所涉及的处理的控制器的功能的框图。
10.图3是表示路面判定部的功能的框图。
11.图4a是对滑动判定处理的前后g检测值的0点校正进行说明的流程图。
12.图4b是对滑动判定处理的滑动标志的设定进行说明的流程图。
13.图4c是对前后g检测值、前后g推定值以及车辆的滑动之间的相互关系进行说明的图。
14.图5是对推定状态判定处理进行说明的流程图。
15.图6a是对设定非动作化标志的处理进行说明的流程图。
16.图6b是对清空非动作化标志的处理进行说明的流程图。
17.图7是对启动标志设定处理进行说明的流程图。
18.图8是对停止标志设定处理进行说明的流程图。
19.图9是表示规定启动阈值以及停止阈值的对应图的一个例子的图。
20.图10是对本实施方式所涉及的控制结果进行说明的图。
具体实施方式
21.下面,参照附图对本发明的各实施方式进行说明。
22.[第1实施方式]
[0023]
图1是说明针对应用本实施方式所涉及的车载致动器控制方法(特别是发动机启动/停止许可控制方法)的串联混合动力车辆(下面,也简称为“车辆100”)共通的结构的框图。
[0024]
如图1所示,车辆100构成为具有发动机(内燃机)1、发电机2、电池3、电动驱动电机4、齿轮5、车轴6、车轮7以及控制器50的所谓串联混合动力车辆。即,在车辆100中,根据请求输出pr,利用发动机1驱动发电机2而对电池3进行充电,从该电池3向行驶用的驱动电机4供给电力。此外,在本实施方式中,作为控制对象的车载致动器中包含发动机1、发电机2以及驱动电机4。
[0025]
发动机1经由增速器(未图示)与发电机2机械连结,发电机2以能够发送接收电力的方式与电池3连接。
[0026]
驱动电机4经由齿轮5与车轴6机械连结,车轴6与车轮7机械连结。驱动电机4的驱动力(或者再生力)经由齿轮5以及车轴6而传递至车轮7。因此,车轮7的旋转速度(即,车辆100的加速或者减速)通过驱动电机4的驱动力(或者再生力)进行调节。
[0027]
特别地,关于本实施方式的车辆100,除了根据针对搭载于车辆100的制动器踏板的操作使车辆100制动的机械式制动器以外,还搭载有如下再生制动器,即,如果针对搭载于车辆100的加速器踏板的踩踏量减小,则根据该减小量使驱动电机4再生而获得制动力。
[0028]
控制器50是以统一进行包含作为本实施方式所涉及的车载致动器控制方法的发动机控制方法所涉及的处理在内的车辆100的控制的方式编程的计算机。更详细而言,控制器50构成为在由中央运算装置(cpu)、只读存储器(rom)、随机访问存储器(ram)以及输入输
出接口(i/o接口)构成的硬件结构中具有用于执行构成车载致动器控制方法的处理的程序。此外,控制器50可以通过在一台计算机硬件安装上述程序而实现,也可以通过在多台计算机硬件上分散地安装上述程序而实现。作为具体例子,控制器50的功能可以由搭载于车辆100的电池控制器、车辆控制器以及电机控制器等各种计算机实现。
[0029]
控制器50将从未图示的各种传感器或者其他控制器类接收的各种参数作为输入而执行上述发动机控制方法。具体而言,控制器50获取电池3的充电率(soc:state of charge)的检测值(下面,也称为“电池soc”)、车轮7的旋转速度的检测值(下面,也称为“车轮速度w”)、针对搭载于车辆10的转向器的转向角的检测值(下面,也称为“转向角度θ”)、前后g(车辆100的前进方向或者后退方向的加速度相对于重力加速度之比)的检测值(下面,也称为“前后g检测值”)、表示防横滑系统(vdc:vehicle dynamics control)的动作的标志(下面,也称为“vdc动作标志f
vdc”)、表示tcs(traction control system)的动作的标志(下面,也称为“tcs动作标志f
tcs”)、表示abs(anti-lock brake system)的动作的有无的标志(下面,也称为“abs动作标志fabs”)、表示can(controller area network)通信的有效性的标志(下面,也称为“can有效标志f
can”)、表示进行搭载于车辆100的机械制动器的动作(针对制动器踏板的操作)的标志(下面,也称为“制动器踏板操作标志f
b”)、驱动电机4的转速的推定值(下面,也称为“电机转速n
m”)、以及针对搭载于车辆100的加速器踏板的操作量(下面,也称为“加速器开度apo”)作为输入。
[0030]
此外,在本实施方式中,加速器开度apo规定对车辆100(特别是驱动电机4)请求的输出(主要是通过车辆100的行驶而消耗的电力)的大小。特别地,在本实施方式中,在加速器开度apo大于或等于规定值的情况下,控制器50执行对驱动电机4请求正的驱动力的动力运行控制,在小于规定值的情况下,执行对驱动电机4请求负的驱动力(即,再生制动力)的再生控制。即,在加速器开度apo大于或等于规定值的情况下,对车辆100请求的输出为正值,在加速器开度apo小于规定值的情况下,对车辆100请求的输出为负值。在下面的说明中,根据简化记载的观点,将对该车辆100请求的输出(正值或者负值)称为“请求输出p
r”。
[0031]
图2是对控制器50的功能进行说明的框图。如图所示,控制器50具有车速运算部20、目标驱动力运算部22、路面判定部24、声音振动启动判定部26、启动/停止标志设定部27以及目标发电动作点设定部28。
[0032]
车速运算部20基于电机转速nm而对车辆100的车速v进行运算。车速运算部20将运算出的车速v向目标驱动力运算部22以及路面判定部24输出。
[0033]
目标驱动力运算部22基于来自车速运算部20的车速v以及加速器开度apo(请求输出pr)而运算针对驱动电机4设定的驱动力的目标值(下面,也称为“目标电机转矩t
m”)。目标驱动力运算部22将运算出的目标电机转矩tm向路面判定部24以及驱动电机4(更详细而言,为未图示的电机逆变器)输出。
[0034]
路面判定部24基于车轮速度w、转向角度θ、前后g检测值、vdc动作标志f
vdc
、tcs动作标志f
tcs
、abs动作标志f
abs
、can有效标志f
can
、制动器踏板操作标志fb以及加速器开度apo而设定路面等级le。
[0035]
这里,路面等级le是在车辆100行驶时使该车辆100的背景噪声的状态实现指标化的参数。特别地,路面等级le作为使根据车轮速度w(更详细而言,为后述的角加速度a)运算出的路面的粗糙度的程度实现数值化的推定值(下面,也称为“路噪值”)、以及使得该路噪
值的推定状态是否为适当的适当推定状态实现指标化的参数而设定。更具体而言,本实施方式的路面等级le由相当于路噪值的推定状态并非适当推定状态的情况的“0”、以及针对每个规定阶段调整路噪值的大小后的“1”~“4”构成。特别地,在本实施方式中,路面等级le的大小作为用于推定是车辆100的背景噪声相对较大的状态、还是较小的状态的指标而使用。更详细而言,在路面等级le为“0”~“2”时,背景噪声的状态推定为低背景噪声状态,在路面等级le为“3”~“4”时,背景噪声的状态推定为高背景噪声状态。
[0036]
下面,对基于路面判定部24的路面等级le的设定所涉及的处理的详情进行说明。
[0037]
图3是表示路面判定部24的功能的框图。如图所示,路面判定部24包含角加速度方差值运算部241、滑动判定部242、推定状态判定部243、方差值校正部244以及路面等级设定部245。
[0038]
角加速度方差值运算部241基于车轮速度w对车轮7的角加速度a的方差值(下面,也称为“角加速度方差值var_a”)进行运算。具体而言,角加速度方差值运算部241针对车轮速度w运算出时间的1阶微分,由此求出角加速度a。而且,角加速度方差值运算部241对角加速度a进行采样而将其方差设为角加速度方差值var_a。下面,将该方差值也称为“角加速度方差值var_a”。
[0039]
这里,角加速度方差值var_a表示角加速度a的偏差,其是与车辆100的行驶路面的粗糙度(路噪值)相关的参数。因此,角加速度方差值var_a可以用作对规定路面等级le的路噪值的大小进行推定的指标。此外,可以取代角加速度方差值var_a而将与标准偏差以及均方根等角加速度a的偏差相关的任意统计量作为路噪值的推定指标进行运算。而且,角加速度方差值运算部241将运算出的角加速度方差值var_a向方差值校正部244输出。
[0040]
滑动判定部242将来自车速运算部20的车速v以及前后g检测值作为输入而执行滑动判定处理。滑动判定处理是在车辆100的特定行驶情况(刚从停车时起步之后的低速行驶状态)下设定表示产生了车辆100的滑动(或者预测其产生)的滑动标志f
sl
的处理。特别地,在本实施方式中,作为判断路噪值的推定状态是否为适当推定状态的要素之一而执行滑动判定处理。特别地,滑动判定处理是根据虽然未使得车辆100达到与上述tcs或者vdc的动作相伴的滑动的程度但却检测到基于角加速度方差值var_a的路噪值的推定精度降低的程度的滑动的产生的观点而执行的。
[0041]
图4a以及图4b是用于对滑动判定处理进行说明的流程图。特别地,图4a表示前后g输入调整所涉及的处理流程,图4b表示滑动标志f
sl
的设定所涉及的处理流程。此外,可以彼此并行地执行图4a以及图4b所涉及的处理。
[0042]
首先,如图4a所示,在步骤s110中,滑动判定部242判定车辆100是否已停车。具体而言,滑动判定部242对车速v为0或者实质为0的状态持续的时间进行计时,在该时间达到预先规定的停车判断基准时间的情况下,判断为车辆100已停车。如果滑动判定部242判断为车辆100未停车,则结束本流程。另一方面,如果滑动判定部242判断为车辆100已停车,则执行步骤s120以后的处理。
[0043]
在步骤s120中,滑动判定部242针对前后g检测值而执行0点校正。即,滑动判定部242运算出从车辆100停车时获取的前后g检测值减去0所得的差值并存储于存储区域。而且,滑动判定部242获取在此后的控制定时从未图示的g传感器(例如,应变仪式或者电容式)输入的检测值减去上述差值所得的值,作为前后g检测值。
[0044]
如图4b所示,在步骤s130中,滑动判定部242判定车辆100是否处于低速行驶状态。具体而言,滑动判定部242判定车速v是否小于或等于预先规定的低速判定阈值。
[0045]
而且,如果滑动判定部242判断为车辆100未处于低速行驶状态,则将滑动标志f
sl
设定为“0”并结束本流程。另一方面,如果滑动判定部242判断为车辆100处于低速行驶状态,则执行步骤s140以后的处理。
[0046]
在步骤s140中,滑动判定部242根据车速v对前后g推定值进行运算。具体而言,滑动判定部242对车速v进行时间微分而对加速度a进行运算,根据加速度a而对前后g推定值进行运算。
[0047]
而且,在步骤s150中,滑动判定部242判定以停车时的值校正后的前后g检测值与根据车速v运算出的前后g推定值之差是否大于规定基准值。这里,规定基准值基于根据车速v(相当于实际的车轮7的转速)推定的前后g推定值相对于基于实际作用于车辆100的惯性力的前后g检测值是否偏离的观点,以能够判断为产生了车辆100的滑动的程度设定为适当的值。
[0048]
图4c是对前后g检测值、前后g推定值以及车辆100的滑动之间的相互关系进行说明的图。此外,图4c的曲线图中的横轴表示前后g推定值(相当于电机转速nm的时间微分值),纵轴表示前后g检测值。另外,虚线l1以及实线l2分别表示未产生滑动时以及产生滑动时的前后g推定值和前后g检测值的关系。另外,虚线l3表示前后g推定值和前后g检测值彼此相同的直线。
[0049]
根据图4c能够理解,在未产生滑动时(虚线l1),前后g推定值和前后g检测值彼此相等。另一方面,在产生滑动时,车轮7的转速的变化率(电机转速nm的变化率)相对于以维持轮胎和路面的压紧状态为前提的值而偏离。因此,在产生滑动时,基于根据电机转速nm运算出的车速v而确定的前后g推定值(实线l2)相对于利用g传感器检测出的前后g检测值(与电机转速nm无关地检测出的值)而偏离。因此,如图4b中说明的那样,参照前后g推定值以及前后g检测值彼此的偏差而能够适当地对车辆100的滑动进行检测。
[0050]
而且,在步骤s150的判断结果为肯定的情况下,滑动判定部242将车辆100的滑动标志f
sl
设定为“1”。另一方面,在步骤s150的判断结果为否定的情况下,滑动判定部242将车辆100的滑动标志f
sl
设定为“0”。
[0051]
返回至图3,滑动判定部242将设定的滑动标志f
sl
输出至推定状态判定部243。
[0052]
推定状态判定部243将车轮速度w、车速v、目标电机转矩tm、制动器踏板操作标志fb、加速器开度apo、vdc动作标志f
vdc
、tcs动作标志f
tcs
、abs动作标志f
abs
、can有效标志f
can
以及滑动标志f
sl
作为输入,执行判断路噪值的推定状态是否为适当的适当推定状态的推定状态判定处理。特别地,在本实施方式的推定状态判定处理中,在路噪值的推定状态为适当推定状态的情况下,将适当推定标志f
op
设定为“1”,在并非适当推定状态的情况下,将适当推定标志f
op
设定为“0”。下面,对推定状态判定处理的详情进行说明。
[0053]
图5是对推定状态判定处理进行说明的流程图。
[0054]
如图所示,首先,在步骤s200中,推定状态判定部243判定制动器踏板操作标志fb、加速器断开标志f
ac
、vdc动作标志f
vdc
、tcs动作标志f
tcs
以及abs动作标志f
abs
是否全部都设定为“0”。此外,加速器断开标志f
ac
是在判断为未进行针对加速器踏板的操作(针对车辆100的驱动力请求)的情况下设定为“1”的标志。具体而言,在加速器开度apo小于或等于预先规
定的规定值的情况下,推定状态判定部243将加速器断开标志f
ac
设定为“1”,在加速器开度apo超过规定值的情况下,将加速器断开标志f
ac
设定为“0”。
[0055]
而且,如果推定状态判定部243判断为上述标志值的至少1个为“1”,则进入步骤s270,将适当推定标志f
op
设定为“0”并结束本流程。即,如果相当于检测出针对制动器踏板的操作的情况、未检测出针对加速器踏板的操作的情况、vdc执行动作的情况、tcs执行动作的情况、以及abs执行动作的情况中的任意情况,则可以认为角加速度a的运算值中含有误差,因此判断为路噪值的推定状态不适当。
[0056]
另一方面,如果在上述步骤s200的判定中判断为所有标志值都为“0”,则推定状态判定部243执行步骤s210的处理。
[0057]
在步骤s210中,推定状态判定部243判定目标电机转矩tm是否大于或等于第1转矩阈值t
m_th1
且小于或等于第2转矩阈值t
m_th2
。而且,在该判定的结果为否定的情况下,推定状态判定部243使处理进入步骤s270,将适当推定标志f
op
设定为“0”并结束本流程。另一方面,在该判定的结果为肯定的情况下,推定状态判定部243执行步骤s220的处理。
[0058]
这里,第1转矩阈值t
m_th1
以及第2转矩阈值t
m_th2
分别为根据确保路噪值的推定精度的观点而确定的目标电机转矩tm的下限值以及上限值。此外,第1转矩阈值t
m_th1
以及第2转矩阈值t
m_th2
可以设定为预先通过实验而确定的固定值,也可以设定为根据车辆100的行驶状态等而变化的可变值。
[0059]
特别地,可以将第1转矩阈值t
m_th1
以及第2转矩阈值t
m_th2
设为与车速v相应的可变值。另外,例如在某个控制定时而步骤s210的判定结果为否定的情况下,可以设为利用在后续的控制定时的该判定时不同的第1转矩阈值t
m_th1
或者第2转矩阈值t
m_th2
的结构。即,可以相对于第1转矩阈值t
m_th1
以及第2转矩阈值t
m_th2
而设定规定的滞后值。
[0060]
接下来,在步骤s220中,推定状态判定部243判定车速v是否大于或等于第1车速阈值v
_th1
且小于或等于第2车速阈值v
_th2
。而且,在该判定的结果为否定的情况下,推定状态判定部243使处理进入步骤s270,将适当推定标志f
op
设定为“0”并结束本流程。另一方面,在该判定的结果为肯定的情况下,推定状态判定部243执行步骤s230的处理。
[0061]
这里,第1车速阈值v
_th1
以及第2车速阈值v
_th2
分别为根据确保路噪值的推定精度的观点而确定的车速v的下限值以及上限值。此外,第1车速阈值v
_th1
以及第2车速阈值v
_th2
可以设定为预先通过实验而确定的固定值,也可以设定为与车辆100的行驶状态等相应地变化的可变值。特别地,针对第1车速阈值v
_th1
以及第2车速阈值v
_th2
,可以与上述第1转矩阈值t
m_th1
以及第2转矩阈值t
m_th2
同样地设定规定的滞后值。
[0062]
接下来,在步骤s230中,推定状态判定部243判定上述滑动判定处理中设定的滑动标志f
sl
是否为“0”。在该判定结果为否定的情况下,推定状态判定部243使处理进入步骤s270,将适当推定标志f
op
设定为“0”并结束本流程。即,在该情况下,判断为有可能因车辆100的滑动而导致用于推定路噪值的角加速度a的运算值中含有误差。另一方面,如果推定状态判定部243判断为滑动标志f
sl
为“0”,则执行步骤s240的处理。
[0063]
在步骤s240中,推定状态判定部243判定can有效标志f
can
是否为“1”。如果推定状态判定部243判断为can有效标志f
can
并非“1”,则进入步骤s270,将适当推定标志f
op
设定为“0”并结束本流程。即,在该情况下,可以认为无法正常获取用于对角加速度a进行运算的车轮速度w等输入参数,判断为路噪值的推定精度有可能降低。另一方面,如果推定状态判定
部243判断为can有效标志f
can
为“1”,则执行步骤s250的处理。
[0064]
在步骤s250中,推定状态判定部243判定方差样本数是否大于或等于恒定值。具体而言,推定状态判定部243将检测到上述步骤s200~步骤s250的判定结果全部都为肯定的定时作为基点,根据适当地对上述角加速度方差值var_a进行运算的观点而判定是否能够获得足够数量的角加速度a的运算值。
[0065]
而且,如果推定状态判定部243判断为方差样本数并未大于或等于恒定值,则进入步骤s270,将适当推定标志f
op
设定为“0”并结束本流程。即,在该情况下,判断为根据确保路噪值的推定精度的观点而用于规定适当的角加速度方差值var_a的输入数据数(更详细而言,为检测出的车轮速度w的数量)不足,将适当推定标志f
op
设定为“0”。另一方面,如果推定状态判定部243判断为方差样本数大于或等于恒定值,则执行步骤s260的处理。此外,在步骤s250的判定中,在该判定结果在某个控制定时为否定的情况下,可以采用等待直至确保方差样本数为止(即,直至该判定结果为肯定为止)的时间的延迟处理。
[0066]
而且,在上述步骤s200~步骤s250的判定结果全部都为肯定的情况下,在步骤s260中,推定状态判定部243将适当推定标志f
op
设定为“1”并结束本流程。即,在本实施方式中,在上述步骤s200~步骤s250的判定结果全部都为肯定的情况下,判断为路噪值的推定精度确保为大于或等于恒定程度,将适当推定标志f
op
设定为“1”。
[0067]
返回至图3,推定状态判定部243将设定的适当推定标志f
op
输出至路面等级设定部245。
[0068]
另一方面,方差值校正部244将车速v、转向角度θ以及角加速度方差值var_a作为输入,对该角加速度方差值var_a进行校正。具体而言,方差值校正部244利用规定与车速v以及转向角度θ相应的校正系数的表而对角加速度方差值var_a进行校正。特别地,在本实施方式中,进行如下校正,即,车速v或者转向角度θ越大,使得角加速度方差值var_a越减小。此外,可以采用如下结构,即,取代基于该车速v以及转向角度θ的角加速度方差值var_a的校正、或者与该校正一并在后述的路面等级设定部245的设定路面等级le的处理中,根据车速v以及转向角度θ而校正与角加速度方差值var_a进行比较的阈值。
[0069]
对该校正的意义进行说明。在进行转向操作的情况下,与未进行转向操作的情况相比,车轮7会以微小幅度滑动,因此,在车轮7在存在凹凸的路面越过凸部时,车轮7的角加速度a的方差容易大于设想值。因此,在进行转向操作的情况下,根据维持路噪值的推定精度的观点,进行根据车速v的大小而减小角加速度方差值var_a的校正。而且,方差值校正部244将校正后的角加速度方差值var_a_c输出至路面等级设定部245。
[0070]
路面等级设定部245将角加速度方差值var_a_c以及适当推定标志f
op
作为输入而设定上述的路面等级le。特别地,在适当推定标志f
op
设定为“0”的情况下(即,路噪值的推定状态并非适当推定状态的情况下),无论角加速度方差值var_a_c如何,路面等级设定部245都将路面等级le设定为“0”。
[0071]
另一方面,在适当推定标志f
op
设定为“1”的情况下(路噪值的推定状态为适当推定状态的情况下),路面等级设定部245根据路噪值(即,角加速度方差值var_a_c)的大小而将路面等级le设定为“1”~“4”。更详细而言,路面等级设定部245针对角加速度方差值var_a_c而设定3个阈值,在根据这3个阈值而分别划分的4个角加速度方差值var_a_c的范围,作为路面等级le而分别分配“1”、“2”、“3”以及“4”。而且,路面等级设定部245将设定的路面等级
le输出至声音振动启动判定部26。
[0072]
此外,在本实施方式中,路面等级le设定为“0”、“1”或者“2”的情况相当于低背景噪声状态,设定为“3”或者“4”的情况相当于高背景噪声状态。
[0073]
返回至图2,声音振动启动判定部26执行用于判定是否使如下控制(下面,也称为“声音振动启动控制”)有效的声音振动启动判定处理,即,将路面等级le、适当推定标志f
op
以及车速v作为输入,根据路面等级le的大小而对应当使发动机1启动的请求输出pr的值(下面,也称为“启动阈值p
r_sth”)或者应当使发动机1停止的请求输出pr的值(下面,也称为“停止阈值p
r_eth”)进行调节。特别地,在本实施方式的推定状态判定处理中,在应当执行声音振动启动判定处理的情况下将非动作化标志f
no
设定为“0”,在不应当执行的情况下设定为“1”。下面,对声音振动启动判定处理的详情进行说明。此外,在本实施方式中,在车辆100启动时(点火开关接通时),以非动作化标志f
no
的初始值设定为“0”或者“1”的任意值为前提。
[0074]
图6a以及图6b是对声音振动启动判定处理进行说明的流程图。特别地,图6a是对将应当使声音振动启动控制的动作无效化的非动作化标志f
no
设定为“1”的判断(非动作化标志设定判断)进行说明的流程图。另外,图6b是对将基于图6a的处理而设定的非动作化标志f
no
清空的判断(非动作化标志清空判断)进行说明的流程图。
[0075]
首先,在图6a所示的非动作化标志设定判断中,在步骤s300中,声音振动启动判定部26判定适当推定标志f
op
是否设定为“1”。而且,如果声音振动启动判定部26判断为适当推定标志fop为“1”,则执行步骤s310以后的处理。
[0076]
在步骤s310中,声音振动启动判定部26设定控制单位距离du。这里,控制单位距离du是车辆100在预先设定的运算周期δt(例如10ms)的期间行驶的距离。即,控制单位距离du定义为对车速v乘以运算周期δt所得的值,是与车速v的大小相应的可变量。
[0077]
在步骤s320中,声音振动启动判定部26对路面判定累计行驶距离d进行运算。具体而言,首先,声音振动启动判定部26获取从车辆100启动时(例如,点火开关接通的定时)起直至当前的控制周期为止的车辆100的总行驶距离。而且,声音振动启动判定部26对从车辆100启动时起直至当前的控制周期为止在适当推定标志f
op
设定为“1”的状态下车辆100行驶的距离即适当推定时行驶距离进行运算。更详细而言,声音振动启动判定部26对适当推定标志f
op
设定为“1”的控制次数乘以上述控制单位距离du而求出路面判定累计行驶距离d。
[0078]
在步骤s330中,声音振动启动判定部26对不良道路行驶累计距离d
ba
进行运算。具体而言,声音振动启动判定部26对从车辆100启动时起直至当前的控制周期为止适当推定标志f
op
设定为“1”且路面等级le设定为“3”或者“4”的控制次数乘以上述控制单位距离du而求出不良道路行驶累计距离d
ba
。
[0079]
而且,在步骤s340中,声音振动启动判定部26对不良道路持续率r
bc
进行运算。具体而言,声音振动启动判定部26将不良道路行驶累计距离d
ba
除以路面判定累计行驶距离d而求出不良道路持续率r
bc
。
[0080]
接下来,在步骤s350中,声音振动启动判定部26判定在车辆100行驶了规定的规定行驶距离d
_th
的状态下不良道路持续率r
bc
是否大于或等于规定的不良道路持续率阈值r
bc_th
。具体而言,声音振动启动判定部26对预先规定的控制次数乘以上述控制单位距离du而对规定行驶距离d
_th
进行运算。而且,声音振动启动判定部26判定规定行驶距离d
_th
的期
间的行驶中的控制周期中不良道路持续率r
bc
是否大于或等于不良道路持续率阈值r
bc_th
。此外,在车辆100的行驶路是“不良道路”还是“良好道路”的判定(基于路面等级le的判定)中,根据判断误判定是否持续的观点而将不良道路持续率阈值r
bc_th
设定为适当的值。
[0081]
特别地,不良道路持续率阈值r
bc_th
在声音振动启动控制的动作设为有效的情况下,根据判断发动机1的动作时间是否延长而导致油耗下降的观点而设定。更详细而言,设想如下情况,即,车辆100在“不良道路”行驶的误判定维持大于或等于恒定期间的期间而使得声音振动启动控制的动作有效的状态(容易使发动机1启动或者难以使发动机1停止的状态)持续,由此电池soc升高而导致发动机1频繁地反复启动和停止。因此,根据抑制这种事态的观点而将不良道路持续率阈值r
bc_th
设定为适当的值。
[0082]
而且,如果声音振动启动判定部26判断为在规定行驶距离d
_th
的整个范围而不良道路持续率r
bc
大于或等于不良道路持续率阈值r
bc_th
,则进入步骤s360,将非动作化标志f
no
设定为“1”并结束本流程。即,在该情况下,将声音振动启动控制设为无效。另一方面,在上述判定结果为否定的情况下,声音振动启动判定部26使处理进入步骤s370,维持非动作化标志f
no
并结束本流程。
[0083]
另一方面,在步骤s300中,声音振动启动判定部26如果判断为适当推定标志f
op
并非“1”(判断为“0”),则进入步骤s340的处理。即,在此次的控制周期中,在判断为路噪值的推定状态不适当的情况下,声音振动启动判定部26不执行步骤s320中的路面判定累计行驶距离d的运算以及步骤s330中的不良道路行驶累计距离d
ba
的运算,而是对不良道路持续率r
bc
进行运算。
[0084]
由此,当在路噪值的推定状态不适当的状态下车辆100的行驶持续的情况下,可以从路面判定累计行驶距离d的运算对象将该行驶所涉及的距离排除,能够抑制所运算出的不良道路持续率r
bc
的精度降低。更详细而言,对路面判定累计行驶距离d加上路噪值的推定状态不适当的状态下的距离而运算出低于设想值的不良道路持续率r
bc
,由此抑制基于误判定而对声音振动启动控制的动作和非动作进行切换的现象。
[0085]
此外,优选地,声音振动启动判定部26以如下方式构成,即,在非动作化标志f
no
从“1”切换为“0”以后的控制周期中,将上述步骤s320中运算出的路面判定累计行驶距离d重置为0。由此,在车辆100从启动起行驶了较长距离的情况下,路面判定累计行驶距离d变为较大的值,能够抑制将不良道路行驶累计距离d
ba
除以路面判定累计行驶距离d所得的不良道路持续率r
bc
的变化率减小。其结果,能够进一步提高基于不良道路持续率r
bc
的误判定的精度。
[0086]
接下来,对图6b所示的非动作化标志清空判断进行说明。
[0087]
首先,在步骤s380中,声音振动启动判定部26判定非动作化标志f
no
是否设定为“1”。而且,如果声音振动启动判定部26判断为非动作化标志f
no
并非“1”(判断为“0”),则结束本流程。另一方面,如果声音振动启动判定部26判断为非动作化标志f
no
为“1”,则执行步骤s381以后的处理。
[0088]
在步骤s381中,声音振动启动判定部26判定在规定行驶距离d
_th
的整个范围而行驶的状态下良好道路持续率r
gc
是否大于或等于规定的良好道路持续率阈值r
gc_th
。具体而言,声音振动启动判定部26通过与上述步骤s350的处理同样的方法,对规定行驶距离d
_th
进行运算。而且,声音振动启动判定部26判定在规定行驶距离d
_th
的期间的行驶中的控制周期
中良好道路持续率r
gc
是否大于或等于良好道路持续率阈值r
gc_th
。
[0089]
这里,良好道路持续率r
gc
是将良好道路行驶累计距离d
gc
除以上述路面判定累计行驶距离d所得的值。另外,可以对路面等级le设定为“0”~“2”的任意值的控制次数乘以上述控制单位距离du而对良好道路行驶累计距离d
gc
进行运算。此外,可以从1(相当于全部路面判定累计行驶距离d)减去步骤s340中求出的不良道路持续率r
bc
而求出良好道路持续率r
gc
。并且,根据判断为以能够将非动作化标志f
no
清空的程度使得基于路面等级le的良好道路判断持续(即,判断为未产生基于误判定的不良道路行驶判断)的观点而将良好道路持续率阈值r
gc_th
设定为适当值。
[0090]
特别地,根据如下观点将良好道路持续率阈值r
gc_th
设定为适当值,即,因根据抑制基于以上述误判定为基础的不良道路判断而执行声音振动启动控制的观点所设定的非动作化标志f
no
始终设定为“1”,从而即使在所需的情况下也能抑制发动机1不执行动作的事态。
[0091]
而且,如果声音振动启动判定部26判断为良好道路持续率r
gc
在规定行驶距离d
_th
的整个范围大于或等于良好道路持续率阈值r
gc_th
,则进入步骤s382,将非动作化标志f
no
设定为“0”并结束本流程。即,在该情况下,将声音振动启动控制从无效状态切换为有效状态。另一方面,在上述判定结果为否定的情况下,声音振动启动判定部26使处理进入步骤s383,维持非动作化标志f
no
不变并结束本流程。
[0092]
返回至图2,声音振动启动判定部26将设定的非动作化标志f
no
输出至启动/停止标志设定部27。
[0093]
启动/停止标志设定部27将电池soc、非动作化标志f
no
以及目标电机转矩tm作为输入,执行对用于使发动机1启动的启动标志f
st
(通常启动标志f
ust
以及不良道路启动标志f
bst
)、以及用于使其停止的停止标志f
en
(通常停止标志f
uen
以及不良道路停止标志f
ben
)进行设定的启动/停止标志设定处理(启动标志设定处理以及停止标志设定处理)。
[0094]
图7是对启动标志设定处理进行说明的流程图。
[0095]
首先,在步骤s410以及步骤s420中,启动/停止标志设定部27设定通常启动阈值p
r_suth
以及不良道路启动阈值p
r_sbth
。
[0096]
这里,通常启动阈值p
r_suth
设定为对根据将电池soc维持为适当范围、且使发动机1尽量在运转效率良好的运转点(接近最佳油耗点的运转点)执行动作的观点而确定的启动定时进行规定的请求输出pr的值。因此,本实施方式的通常启动阈值p
r_suth
以将请求输出pr、车速v以及电池soc作为变量的对应图的方式预先准备。
[0097]
另一方面,不良道路启动阈值p
r_sbth
在电池soc未超过适当范围的范围内,设定为对根据与设定了通常启动阈值p
r_suth
的情况相比容易使发动机1启动的观点而确定的启动定时进行规定的请求输出pr的值。即,不良道路启动阈值p
r_sbth
设定为小于或等于通常启动阈值p
r_suth
的值,以将请求输出pr、车速v以及电池soc作为变量的对应图的方式而预先准备。
[0098]
接下来,在步骤s430中,启动/停止标志设定部27判定非动作化标志f
no
是否为“1”。而且,在启动/停止标志设定部27判断为非动作化标志f
no
为“1”的情况下(声音振动启动控制无效的情况下),进入步骤s440的处理。
[0099]
在步骤s440中,启动/停止标志设定部27判定请求输出pr是否大于或等于通常启
动阈值p
r_suth
。而且,如果启动/停止标志设定部27判断为请求输出pr大于或等于通常启动阈值p
r_suth
,则在步骤s460中作为启动标志f
st
而设定通常启动标志fust并结束本处理。
[0100]
另一方面,在步骤s430中判断为非动作化标志f
no
为“0”的情况下(声音振动启动控制有效的情况下),启动/停止标志设定部27使处理进入步骤s450。
[0101]
在步骤s450中,启动/停止标志设定部27判定请求输出pr是否大于或等于不良道路启动阈值p
r_sbth
。而且,如果启动/停止标志设定部27判断为请求输出pr大于或等于不良道路启动阈值p
r_sbth
,则在步骤s470中作为启动标志f
st
而设定不良道路启动标志f
bst
并结束本处理。
[0102]
根据以上说明的启动标志设定处理,在声音振动启动控制有效的情况下,在请求输出pr大于或等于比通常启动阈值p
r_suth
小的不良道路启动阈值p
r_sbth
时,设定启动标志f
st
(不良道路启动标志f
bst
)。
[0103]
图8是对停止标志设定处理进行说明的流程图。
[0104]
首先,在步骤s510以及步骤s520中,启动/停止标志设定部27设定通常停止阈值p
r_euth
以及不良道路停止阈值p
r_ebth
。
[0105]
这里,通常停止阈值p
r_euth
设定为对即使使发动机1停止(停止发电)也能够充分确保电池soc的停止定时进行规定的请求输出pr的值。以将请求输出pr、车速v以及电池soc作为变量的对应图的方式而预先准备通常停止阈值p
r_euth
。
[0106]
另一方面,不良道路停止阈值p
r_ebth
设定为对在能够将电池soc维持于适当范围内的范围更难使发动机1停止的停止定时进行规定的请求输出pr的值。即,不良道路停止阈值p
r_ebth
设定为小于或等于通常停止阈值p
r_euth
的值,以将请求输出pr、车速v以及电池soc作为变量的对应图的方式而预先准备。
[0107]
在步骤s530中,启动/停止标志设定部27判定作为启动标志f
st
是否设定了不良道路启动标志f
bst
。而且,如果启动/停止标志设定部27判断为设定了不良道路启动标志f
bst
,则进入步骤s550的处理,如果判断为未设定,则进入步骤s540的处理。
[0108]
在步骤s540中,启动/停止标志设定部27判定车辆100当前是否处于不良道路行驶中。具体而言,在当前的控制定时设定的路面等级le大于或等于“3”的情况下,启动/停止标志设定部27判断为处于不良道路行驶中,在并非如此的情况下,判断为处于良好道路行驶中。
[0109]
而且,如果启动/停止标志设定部27判断为车辆100当前处于不良道路行驶中,则进入步骤s550的处理,另一方面,如果判断为处于良好道路行驶中,则进入步骤s560的处理。
[0110]
在步骤s550中,启动/停止标志设定部27判定请求输出pr是否小于或等于不良道路停止阈值p
r_ebth
。而且,如果启动/停止标志设定部27判断为请求输出pr小于或等于不良道路停止阈值p
r_ebth
,则作为停止标志f
en
而设定不良道路停止标志f
ben
(步骤s570),结束本处理。另一方面,如果启动/停止标志设定部27判断为请求输出pr未小于或等于不良道路停止阈值p
r_ebth
,则不设定停止标志f
en
并结束本处理。
[0111]
在步骤s560中,启动/停止标志设定部27判定请求输出pr是否小于或等于通常停止阈值p
r_euth
。而且,如果启动/停止标志设定部27判断为请求输出pr小于或等于通常停止阈值p
r_euth
,则作为停止标志f
en
而设定通常停止标志f
uen
(步骤s580),结束本处理。另一方
面,如果启动/停止标志设定部27判断为请求输出pr未小于或等于通常停止阈值p
r_euth
,则不设定停止标志f
en
并结束本处理。
[0112]
根据以上说明的停止标志设定处理,在作为启动标志f
st
而设定了不良道路启动标志f
bst
的情况下(发动机1以不良道路启动阈值p
r_sbth
启动的情况下),作为停止标志f
en
而设定不良道路停止标志f
ben
(发动机1以不良道路停止阈值p
r_ebth
停止)。另一方面,在作为启动标志f
st
而设定了通常启动标志f
ust
的情况下(发动机1以通常启动阈值p
r_suth
启动的情况下),根据停止时的行驶路面是“不良道路”还是“良好道路”而设定不良道路停止标志f
ben
或者通常停止标志f
uen
。
[0113]
图9中示出了对通常启动阈值p
r_suth
、不良道路启动阈值p
r_sbth
、通常停止阈值p
r_euth
以及不良道路停止阈值p
r_ebth
进行规定的对应图的一个例子。根据图9所示的对应图,关于不良道路启动阈值p
r_sbth
,在低/中车速区域(车速v小于或等于第2车速阈值v
_th2
的区域),不良道路启动阈值p
r_sbth
以及不良道路停止阈值p
r_ebth
设定为低于通常启动阈值p
r_suth
以及通常停止阈值p
r_euth
的值。特别地,优选在容易允许电池soc的变化的soc中间区域(即使电池soc变化也不易偏离适当范围的区域)将不良道路启动阈值p
r_sbth
以及不良道路停止阈值p
r_ebth
设定为低于通常启动阈值p
r_suth
以及通常停止阈值p
r_euth
的值,在其他soc区域将不良道路启动阈值p
r_sbth
(不良道路停止阈值p
r_ebth
)以及通常启动阈值p
r_suth
(通常停止阈值p
r_euth
)设定为彼此大致相同的值。由此,能够抑制因执行声音振动启动控制而引起的电池3的过充电或过放电、或者因电池soc落入或脱离释放范围而引起的发动机1的频繁的启动以及停止。
[0114]
另外,不良道路启动阈值p
r_sbth
以及通常启动阈值p
r_suth
设定为电池soc越低则越小的值。并且,不良道路停止阈值p
r_ebth
以及通常停止阈值p
r_euth
设定为电池soc越大则越大的值。
[0115]
返回至图2,启动/停止标志设定部27将设定的启动标志f
st
以及停止标志f
en
输出至目标发电动作点设定部28。
[0116]
目标发电动作点设定部28将启动标志f
st
以及停止标志f
en
作为输入而设定发动机1的运转点。具体而言,目标发电动作点设定部28根据由启动标志f
st
以及停止标志f
en
规定的发动机1的启动定时以及停止定时,以在能够将电池soc维持为适当范围的范围内尽量能够改善油耗的方式(接近最佳油耗点)设定发动机1的目标转速ne以及目标转矩te。而且,目标发电动作点设定部28将设定的发动机1的目标转速ne以及目标转矩te分别输出至发电机2(特别是未图示的发电机2的逆变器)以及发动机1(特别是未图示的发动机控制控制器)。
[0117]
图10是对将本实施方式所涉及的控制方法应用于车辆100的特定的行驶情况的控制结果进行说明的图。图10(a)表示将声音振动启动控制设为有效的区间。另外,图10(b)表示电池soc的经时变化。并且,图10(c)表示请求输出pr、启动阈值p
r_sth
以及停止阈值p
r_eth
的经时变化。特别地,不良道路启动阈值p
r_sbth
以及通常启动阈值p
r_suth
分别由粗实线以及粗虚线表示,不良道路停止阈值p
r_ebth
以及通常停止阈值p
r_euth
分别由细实线以及细虚线表示。
[0118]
如图所示,直至时刻t1为止,在“良好道路”行驶的状态持续而使得声音振动启动控制有效(图6b的步骤s381的yes以及步骤s382)。而且,在时刻t1,车辆100开始在“不良道路”行驶而开始声音振动启动控制。
[0119]
而且,在时刻t2,如果请求输出pr大于或等于不良道路启动阈值p
r_sbth
,则设定不良道路启动标志f
bst
,使得发动机1启动(步骤s450的yes、以及步骤s470)。与此相伴,开始发电而使得电池soc开始增加。
[0120]
接下来,在时刻t3,不良道路持续率r
bc
超过不良道路持续率阈值r
bc_th
,声音振动启动控制变得无效(图6a的步骤s350的yes以及步骤s360)。而且,请求输出pr在不良道路行驶中小于或等于不良道路停止阈值p
r_ebth
,设定不良道路停止标志f
ben
,使得发动机1停止(步骤s540的yes、步骤s550的yes以及步骤s570)。与此相伴,停止发电而使得电池soc开始减小。
[0121]
根据以上说明的本实施方式所涉及的控制方法,在车辆100的背景噪声处于高背景噪声状态的情况下(路面等级le为“3”或者“4”的情况下),与低背景噪声状态(路面等级le为“0”~“2”的情况)相比容易使发动机1启动,另一方面,能够实现难以使其停止的控制。因此,在车辆100行驶时,能够减轻因发动机1的噪声对乘员造成的不悦感,并且能够满足根据请求输出pr以及电池soc而请求的发电电力量。
[0122]
[变形例]
[0123]
接下来,对上述实施方式中说明的控制方法的变形例进行说明。
[0124]
(变形例1)
[0125]
可以采用如下结构,即,利用由车辆100的乘员等操作的规定的开关(点火开关等)对滑动判定处理、推定状态判定处理或者声音振动启动判定处理的执行和不执行进行切换。例如,可以采用与推定状态判定处理相比优先将适当推定标志f
op
设定为“0”的结构、或者与声音振动启动判定处理相比优先将非动作化标志f
no
设定为“1”的结构。由此,车辆100的乘员等能够根据希望而选择使发动机1启动的模式和不使其启动的模式。
[0126]
(变形例2)
[0127]
应用本实施方式的控制方法的车载致动器并不局限于发动机1。即,如果是在路噪值较小时发出有可能使车辆100的乘员感受到不悦感的程度的恒定的动作声(噪声)的装置,则可以对上述实施方式中说明的控制进行修改并应用。作为这种车载致动器,例如能举出空调、风扇、导航系统以及音响等。另外,作为其他车载致动器,对于为了使处于行驶中的车辆100的周围的人意识到该车辆100的存在而生成模拟发动机1的驱动音的声音的行驶声音生成器而可以应用本实施方式的控制方法。
[0128]
(变形例3)
[0129]
在本实施方式中作为车辆100的背景噪声的大小的指标的路面等级le并不局限于“0”~“4”这5个等级。即,变为路噪值本身以及基于针对该路噪值的推定状态的车辆100的背景噪声的大小的指标,如果能够区分为高背景噪声状态和低背景噪声状态,则可以设定为任意等级。另外,可以以连续量的参数来表现车辆100的背景噪声的大小的指标。
[0130]
(变形例4)
[0131]
作为用于对路噪值进行运算的检测参数,可以取代车轮7的角加速度a、或者与其一起采用与路噪的大小相关的其他任意检测参数。作为这种检测参数,例如能举出轮胎的角加速度、利用麦克风等直接检测出的行驶声音、g传感器检测值(与基于路面的状态的加速度的变化相关)、以及悬架的变动量(路面状态的变动)等。
[0132]
(变形例5)
[0133]
可以采用如下结构,即,根据对车辆100设定的规定的动作模式而对滑动判定处理、推定状态判定处理、声音振动启动判定处理、或者发动机启动本身的执行和不执行进行切换。例如,在通过针对规定的开关的操作而限制发动机1的动作的情况下(设定为静音模式时)、或者车辆100起动时(电源接通时),对于发动机1的初次启动前的状态,可以与声音振动启动判定处理相比优先将非动作化标志f
no
设定为“1”、或者禁止发动机1的动作本身。
[0134]
[本实施方式的结构及其作用效果1]
[0135]
根据本实施方式,提供一种对作为噪声源的车载致动器的动作进行控制的车载致动器控制方法。该车载致动器控制方法包括如下工序:根据车辆100的车轮7的角加速度a而推定使得路噪的大小实现数值化的路噪值的路噪值推定工序(角加速度方差值运算部241以及方差值校正部244);判定路噪值的推定状态是否为适当的适当推定状态的推定状态判定工序(图5);基于路噪值以及推定状态而判定车辆100的背景噪声处于相对较大的高背景噪声状态(路面等级le=“3”~“4”)还是相对较小的低背景噪声状态(判定是否为路面等级le=“0”~“2”)的背景噪声状态判定工序(路面等级设定部245);以及根据判定出的车辆100的背景噪声的状态而调节车载致动器(发动机1)的输出的输出调节工序(图7以及图8)。
[0136]
而且,在背景噪声状态判定工序(声音振动启动判定处理)中,在判断为推定状态是适当推定状态的情况下(图5的步骤s200~步骤s240的判定结果全部为肯定的情况下),根据路噪值以及规定的阈值(路面等级le=“2”和“3”)的大小而判定车辆100的背景噪声处于高背景噪声状态还是低背景噪声状态(步骤s300中为yes、以及步骤s310~步骤s350)。另外,在背景噪声状态判定工序中,在判断为推定状态并非适当推定状态的情况下(步骤26s300中为no),无论路噪值如何都判断为车辆100的背景噪声处于低背景噪声状态(步骤s360)。
[0137]
并且,在上述输出调节工序中,在判断为车辆100的背景噪声处于高背景噪声状态的情况下,以使得与车载致动器的动作相伴的噪声(与发动机1的动作相伴的噪声)相对增大的方式设定该车载致动器的输出。另一方面,在判断为车辆100的背景噪声处于低背景噪声状态的情况下,以使得与车载致动器的动作相伴的噪声相对减小的方式设定该车载致动器的输出。
[0138]
由此,实现如下控制,即,在车辆100的乘员难以意识到与车载致动器的动作相伴的噪声的高背景噪声状态下提高车载致动器的输出,另一方面,在容易意识到该噪声的低背景噪声状态下降低车载致动器的输出。特别地,在路噪值的推定精度(角加速度a的检测精度)较低的情况下,无论该路噪值如何都判断为车辆100的背景噪声处于低背景噪声状态,能够防止基于误判定而在低背景噪声状态下将车载致动器的输出设定得较高的事态。其结果,能够更可靠地防止因与车载的致动器的动作相伴的噪声对乘员造成不悦感。
[0139]
此外,在本实施方式中,提供一种执行上述车载致动器控制方法的车载致动器控制装置(控制器50)。特别地,控制器50作为如下部件而起作用:执行路噪值推定工序的路噪值推定部(角加速度方差值运算部、方差值校正部244以及路面等级设定部245);执行上述推定状态判定工序的推定状态判定部243;执行背景噪声状态判定工序的背景噪声状态判定部(路面等级设定部245);以及执行输出调节工序的输出调节部(启动/停止标志设定部27或者目标发电动作点设定部28)。
[0140]
另外,在本实施方式的推定状态判定工序中,在车辆100的机械制动器执行动作的
情况下,判断为路噪值的推定状态并非适当推定状态(步骤s200的no以及步骤s270)。
[0141]
即,作为判断为路噪值的推定状态并非适当推定状态的具体的情况,可以设定作用于车轮7的摩擦力成为相对于用于对路噪值进行推定的角加速度a的外部干扰要素的机械制动动作时。此外,关于本实施方式的车辆100,作为制动功能,除了机械制动器以外,搭载有如下再生制动器,即,根据加速器开度apo的减小量对驱动电机4的再生力进行调节而进行制动。因此,可以认为,因制动情况而使得再生制动器的执行频率高于机械制动器。因此,即使采用了将机械制动器动作时判断为并非适当推定状态的控制逻辑,也能够抑制在车辆100的制动情况下必须判断为并非适当推定状态的事态(制动时始终将车载致动器的输出设定得较低的事态)。
[0142]
并且,在本实施方式的推定状态判定工序中,在车轮7滑动的情况下,判断为路噪值的推定状态并非适当推定状态(图4a、图4b的滑动判定处理)。即,作为判断为推定状态并非适当推定状态的具体的情况,可以设定因车轮7的空转引起的角加速度a的振动成为外部干扰要素的滑动时。
[0143]
另外,在本实施方式的推定状态判定工序中,在车辆100的加速度(前后g推定值)大于根据判断该车辆100的急减速或者急加速的观点而确定的规定加速度(前后g检测值)的情况下,判断为车轮7滑动(步骤s150的yes)。即,实现了将与通常的减速时或者加速时相比更强的制动力或者驱动力成为外部干扰要素的急减速时或者急加速时判断为有可能滑动的情况的逻辑。
[0144]
此外,可以采用如下结构,即,在取代车辆100的加速度或者与其一起而作为搭载于车辆100的行驶驱动源的驱动电机4的目标电机转矩tm大于根据判断该车辆100的急减速或者急加速的观点所规定的规定驱动力的情况下,判断为车轮7滑动。特别地,在车辆100在坡道起步或者停止的情况下,还能够想到即使处于急减速时或者急加速时减速度或者加速度也较小。即,可以认为,根据行驶情况无法仅从减速度或者加速度而高精度地确定急减速时或者急加速时。与此相对,还包含行驶路的坡度而设定目标电机转矩tm,因此即使在坡道也能够适当地反映出因急减速或者急加速引起的增减。因此,在坡道行驶时等特定的行驶情况下,能够更适当地确定车辆100滑动的情况。
[0145]
并且,在本实施方式中,车辆100构成为根据请求输出pr对发电机2进行驱动而对电池3进行充电,并从该电池3对行驶用的驱动电机4供给电力的串联混合动力车辆。车载致动器构成为对发电机2进行驱动的发动机1。
[0146]
而且,在输出调节工序中,根据判定的车辆100的背景噪声的状态(路面等级le为“0”~“4”的任意值)而设定用于许可发动机1的启动的请求输出pr的阈值即启动阈值p
r_sth
(图7、图9)。另外,设定用于许可发动机1的停止的请求输出pr的阈值即停止阈值p
r_eth
(图8、图9)。
[0147]
特别地,如果请求输出pr大于或等于启动阈值p
r_sth
则判断发动机1的启动,如果请求输出pr小于或等于停止阈值p
r_eth
则判断发动机1的停止。
[0148]
而且,在判断为车辆100的背景噪声处于高背景噪声状态(路面等级le=“3”~“4”)的情况下,将启动阈值p
r_sth
设定为相对较小的第1启动阈值(不良道路启动阈值p
r_sbth
)(步骤s430的yes以及步骤s440)。另外,将停止阈值p
r_eth
设定为相对较小的第1停止阈值(不良道路停止阈值p
r_ebth
)(步骤s540的yes以及步骤s550)。另一方面,在判断为车辆100的背
景噪声处于低背景噪声状态(路面等级le=“0”~“2”)的情况下,将启动阈值p
r_sth
设定为相对较大的第2启动阈值(通常启动阈值p
r_suth
)(步骤s430的no以及步骤s450)。另外,将停止阈值p
r_eth
设定为相对较大的第2停止阈值(通常停止阈值p
r_euth
)(步骤s540的no以及步骤s560)。
[0149]
这样,作为基于上述实施方式中说明的控制方法的车载致动器而设想串联混合动力型的车辆100的发动机1,作为其输出调整而改变使发动机1启动或者停止的请求输出pr,能够以在车辆100行驶时不会对乘员造成由噪声引起不悦感的方式调节发动机1的启动定时以及停止定时。
[0150]
[本实施方式的结构及其作用效果2]
[0151]
根据本实施方式,提供一种作为上述车载致动器控制方法以及车载致动器控制装置的一个方式的发动机控制方法以及发动机控制装置。
[0152]
在本实施方式的发动机控制方法中,在根据请求输出pr利用发动机1对发电机2进行驱动而对电池3进行充电,并从该电池3向行驶用的驱动电机4供给电力的串联混合动力型的车辆100中,设定用于使发动机1启动的请求输出pr的阈值即启动阈值p
r_sth
。而且,该发动机控制方法包含如下工序:判定车辆100的背景噪声处于相对较大的高背景噪声状态(路面等级le=“3”~“4”)还是相对较小的低背景噪声状态(路面等级le=“0”~“2”)的背景噪声状态判定工序(路面等级设定部245);以及根据车辆100的背景噪声的状态而设定启动阈值p
r_sth
的启动/停止阈值设定工序(启动标志设定处理)。
[0153]
而且,在启动/停止阈值设定工序中,在判断为车辆100的背景噪声处于高背景噪声状态的情况下,将启动阈值p
r_sth
设定为相对较小的第1启动阈值(不良道路启动阈值p
r_sbth
)(步骤s430的no以及步骤s450),在判断为车辆100的背景噪声处于低背景噪声状态的情况下,将启动阈值p
r_sth
设定为相对较大的第2启动阈值(通常启动阈值p
r_suth
)(步骤s430的yes以及步骤s460)。
[0154]
并且,在本实施方式的发动机控制方法中,在启动/停止阈值设定工序中,根据车辆100的背景噪声的状态而设定用于使发动机1停止的请求输出pr的阈值即停止阈值p
r_eth
(停止标志设定处理)。而且,如果判断为车辆100的背景噪声处于高背景噪声状态(路面等级le=“3”~“4”),则将停止阈值p
r_eth
设定为相对较小的第1停止阈值(不良道路停止阈值p
r_ebth
)(步骤s540的yes以及步骤s550)。另外,如果判断为车辆100的背景噪声处于低背景噪声状态(路面等级le=“0”~“2”),则将停止阈值p
r_eth
设定为相对较大的第2停止阈值(通常停止阈值p
r_euth
)(步骤s540的no以及步骤s560)。
[0155]
由此,在高背景噪声状态下,与低背景噪声状态相比,能够使得发动机1难以停止。其结果,成为在如上所述的高背景噪声状态下容易使发动机1启动且难以使其停止的结构,因此能够延长车辆100的乘员难以意识到噪声的高背景噪声状态的发动机1的动作时间,能够更适当地确保发电量(针对电池3的充电量)。另外,在高背景噪声状态持续恒定期间的状况下,还能抑制不良道路启动阈值p
r_sbth
和不良道路停止阈值p
r_ebth
变为彼此接近的值所导致的频繁的发动机1的启动和停止。
[0156]
此外,在本实施方式中,提供一种执行上述发动机控制方法的发动机控制方法(控制器50)。即,控制器50作为执行背景噪声状态判定工序的背景噪声状态判定部(路面等级设定部245)、以及执行启动/停止阈值设定工序的启动/停止阈值设定部(启动/停止标志设
定部27)而起作用。
[0157]
特别地,在本实施方式的推定状态判定工序中,将不良道路启动阈值p
r_sbth
以及通常启动阈值p
r_suth
设定为电池3的充电率(电池soc)越低则越小的值。由此,在高背景噪声状态以及低背景噪声状态这两种状态下,能够不使电池soc低于适当范围地使发动机1启动。
[0158]
并且,本实施方式的发动机控制方法还包含如下工序,即,根据车辆100的车轮7的角加速度a而推定使得路噪的大小实现数值化的路噪值(“1”~“4”的范围的路面等级le)的路噪值推定工序(角加速度方差值运算部241以及方差值校正部244)。而且,在路面等级设定部245中,在路噪值大于或等于规定的阈值(路面等级le=“2”和“3”)的情况下,判断为车辆100的背景噪声处于高背景噪声状态(步骤s300中为yes)。而且,在基于路噪值的高背景噪声状态的判断持续的情况下(当在规定行驶距离d
_th
整个范围而不良道路持续率r
bc
大于或等于不良道路持续率阈值r
bc_th
的情况下),在后续的控制中,无论路噪值和上述阈值的大小关系如何,都判断为车辆100的背景噪声的状态为低背景噪声状态(步骤s350的yes以及步骤s360)。
[0159]
由此,能够根据从角加速度a运算出的路噪值和规定的阈值的大小关系而判断车辆100的背景噪声的状态是高背景噪声状态还是低背景噪声状态。即,实现了用于判断车辆100的背景噪声的状态的具体的控制逻辑。在此基础上,在判断为路噪值大于或等于阈值的状态持续的情况下,在以后的控制中,判断为车辆100的背景噪声的状态为低背景噪声状态。因此,能够可靠地防止因基于低于通常启动阈值p
r_suth
的值的不良道路启动阈值p
r_sbth
使得发动机1启动的状态持续而引起的、电池3的过充电或者油耗的降低。
[0160]
特别地,在规定的控制期间(规定行驶距离d
_th
)中基于车辆100在不良道路行驶的距离的比例(不良道路持续率r
bc
)是否大于或等于基准值(不良道路持续率阈值r
bc_th
),判断基于路噪值的高背景噪声状态的持续。由此,能够规定设想车辆100现实的行驶情况而无论路噪值如何都判断为低背景噪声状态的适当的控制期间。此外,可以采用如下结构,即,取代不良道路持续率r
bc
而基于规定的控制期间的不良道路行驶时间的比例是否大于或等于基准值来对判断为路噪值大于或等于上述阈值的状态的持续进行判断。
[0161]
而且,本实施方式的发动机控制方法还包含判定路噪值的推定状态是否为适当的适当推定状态的推定状态判定工序(图5)。而且,在背景噪声状态判定工序中,将判断为推定状态并非适当推定状态的控制定时从上述控制期间排除(步骤s300的no)。
[0162]
由此,在根据车辆100的行驶情况等而无法适当地确保路噪值的推定精度的情况下,能够抑制基于误判定而判断为上述高背景噪声状态未持续的事态(其结果,判断为背景噪声的状态为低背景噪声状态的事态)。由此,能够更可靠地防止在低背景噪声状态下使发动机1执行动作而对车辆100的乘员造成不悦感的情况。
[0163]
此外,在本实施方式的发动机控制方法中,基本上以实现将电池soc维持于适当范围内的发电量的方式设定启动阈值p
r_sth
以及停止阈值p
r_eth
。即,针对在车辆100以某个行驶距离行驶时消耗的能量(请求输出pr的积分值)而决定所需的发电量,因此需要确保与该发电量相应的发动机1的动作时间。与此相对,如上所述,设为在高背景噪声状态下使得启动阈值p
r_sth
以及停止阈值p
r_eth
都小于低背景噪声状态时的结构,由此能够适当地维持用于确保所需的发电量的发动机1的动作时间。换言之,能够维持车辆100不使发动机1执行动作而行驶的状态(ev行驶)的频率。
[0164]
特别地,在本实施方式中,将不良道路停止阈值p
r_ebth
以及通常停止阈值p
r_euth
设定为电池soc越高则越大的值。由此,在高背景噪声状态以及低背景噪声状态这两种状态下,能够使发动机1停止以使得电池soc不超出适当范围。
[0165]
并且,本实施方式的发动机控制方法包含如下工序:如果请求输出pr大于或等于启动阈值p
r_sth
则生成发动机1的启动指令(启动标志f
st
)的发动机启动判断工序(图7);以及如果请求输出pr小于或等于停止阈值p
r_eth
则生成发动机1的停止指令(停止标志f
en
)的发动机停止判断工序(图8)。
[0166]
在发动机启动判断工序中,在车辆100的背景噪声处于高背景噪声状态的情况下(步骤s430的no),如果请求输出pr大于或等于不良道路启动阈值p
r_sbth
则生成不良道路启动标志f
bst
(步骤s450的yes以及步骤s470),在车辆100的背景噪声处于低背景噪声状态的情况下(步骤s430的yes),如果请求输出pr大于或等于通常启动阈值p
r_suth
则生成通常启动标志f
ust
(步骤s440的yes以及步骤s460)。
[0167]
另一方面,在发动机停止判断工序(启动/停止标志设定部27)中,在车辆100的背景噪声处于高背景噪声状态的情况下(步骤s530的yes),如果请求输出pr小于或等于不良道路停止阈值p
r_ebth
,则生成不良道路停止标志f
ben
(步骤s550的yes以及步骤s570),在车辆100的背景噪声处于低背景噪声状态的情况下(步骤s530的no),如果请求输出pr小于或等于通常停止阈值p
r_euth
,则生成通常停止标志f
uen
(步骤s460的yes以及步骤s580)。
[0168]
由此,能够实现用于在高背景噪声状态下与低背景噪声状态相比更容易使发动机1启动、且难以使发动机1停止的具体控制逻辑。
[0169]
另外,在发动机启动指令工序中,在判断为车辆100的背景噪声处于高背景噪声状态的状态持续的情况下(步骤s350的yes以及步骤s360),在后续的控制中,无论车辆100的背景噪声的状态的判断结果如何,如果请求输出pr大于或等于通常启动阈值p
r_suth
则生成通常启动标志f
ust
(步骤s430的yes、步骤s440的yes以及步骤s460)。
[0170]
由此,即使在判断为高背景噪声状态持续恒定期间的情况下,也不将实际的发动机1的启动限制为该判断,实现能够基于通常启动阈值p
r_suth
而使发动机1启动的控制逻辑。因此,能够避免上述电池3的过充电以及油耗的恶化。
[0171]
此外,可以采用如下结构,即,在发动机停止指令工序中,在判断为车辆100的背景噪声处于高背景噪声状态的状态持续的情况下,无论在后续的控制中车辆100的背景噪声的状态的判断结果如何,如果请求输出pr小于或等于通常停止阈值p
r_euth
则生成通常停止标志f
uen
。根据该结构也能够避免电池3的过充电以及油耗的恶化。
[0172]
另外,在本实施方式的发动机控制方法的发动机停止指令工序中,在请求输出pr大于或等于不良道路启动阈值p
r_sbth
而使得发动机1启动的情况下(步骤s530的yes),无论车辆100的背景噪声的状态如何,如果请求输出pr小于或等于不良道路停止阈值p
r_ebth
则生成停止指令(不良道路停止标志f
ben
)(步骤s550的yes以及步骤s570)。另一方面,在请求输出pr大于或等于通常启动阈值p
r_suth
而使得发动机1启动的情况下(步骤s530的no),如果根据车辆100的背景噪声的状态而请求输出pr小于或等于不良道路停止阈值p
r_ebth
或者小于或等于通常停止阈值p
r_euth
则生成停止标志f
en
(步骤s540~步骤s580)。
[0173]
由此,在基于在高背景噪声状态(特别是不良道路行驶时)下设定的不良道路启动阈值p
r_sbth
而使得发动机1启动的情况下,无论停止时的背景噪声的状态如何,都基于高背
景噪声状态用的不良道路停止阈值p
r_ebth
而使得发动机1停止。因此,尽管在发动机1启动时应用相对较小的不良道路启动阈值p
r_sbth
(不良道路用),但在停止时应用相对较大的通常停止阈值p
r_euth
(良好道路用)也能够抑制因启动阈值p
r_sth
以及停止阈值p
r_eth
彼此接近而频繁地反复使发动机1的启动以及停止的事态。
[0174]
另一方面,在基于在低背景噪声状态(特别是良好道路行驶时)下设定的通常启动阈值p
r_suth
而使得发动机1启动的情况下,即使在应用小于停止时本来设想的通常停止阈值p
r_euth
的不良道路启动阈值p
r_sbth
的情况下,启动阈值p
r_sth
以及停止阈值p
r_eth
也彼此以恒定程度偏离。因此,能够根据停止时的车辆100的背景噪声的状态而应用小于或等于不良道路停止阈值p
r_ebth
或者通常停止阈值p
r_euth
而使得发动机1停止。
[0175]
以上,对本发明的实施方式进行了说明,但上述实施方式不过示出了本发明的应用例的一部分,其主旨并非将本发明的技术范围限定为上述实施方式的具体结构。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。