1.本发明涉及玻璃自动化安装设备技术领域,特别涉及一种自动安装玻璃机器人。
背景技术:
2.现有技术中,高铁车窗玻璃的安装作业多采用人工与助力设备配合完成,存在人工成本高、作业效率低的缺陷,而且车窗的安装面宽阔,由人眼来判断安装位置存在装配精度低的缺陷。
3.
技术实现要素:
4.根据本发明实施例,提供了一种自动安装玻璃机器人,包含:控制模块、全向小车、玻璃存放工装与执行模块;控制模块与全向小车和执行模块电性连接,用于控制全向小车与执行模块;玻璃存放工装设置在全向小车上,用于存放待安装的玻璃;执行模块设置在全向小车上,执行模块与控制模块电性连接,用于安装玻璃。
5.进一步,全向小车的车轮为麦克纳姆轮。
6.进一步,执行模块包含:执行机械臂与执行工装;执行机械臂的一端设置在全向小车的顶部;执行工装设置在执行机械臂的另一端,执行工装与控制模块电性连接。
7.进一步,执行机械臂为六轴机械臂。
8.进一步,执行工装包含:支撑框架、若干个传感器与若干个吸盘;支撑框架的顶部与执行机械臂的另一端固定连接;若干个吸盘均匀分布在支撑框架的底部,用于抓取玻璃;若干个传感器分别设置在支撑框架的四周的侧壁上。
9.进一步,传感器为3d视觉传感器。
10.进一步,玻璃存放工装包含:承载底板、存放支架与若干对定位槽;承载底板设置在全向小车的顶部;一对存放支架对称设置在承载底板的顶部;每一对定位槽分别设置在一对存放支架上,每一对定位槽的位置相匹配,用于对玻璃进行定位。
11.进一步,控制模块包含:处理器与控制器;控制器设置在全向小车的内部,处理器与全向小车、执行模块电性连接;处理器与控制器电性连接,用于处理数据。
12.根据本发明实施例的自动安装玻璃机器人,解决了现有技术中装配作业效率低、人工成本高与装配精度低的缺陷,极大的提高了高铁车窗玻璃的装配质量,具有作业灵活性强的特点。
13.要理解的是,前面的一般描述和下面的详细描述两者都是示例性的,并 且意图在于提供要求保护的技术的进一步说明。
14.附图说明
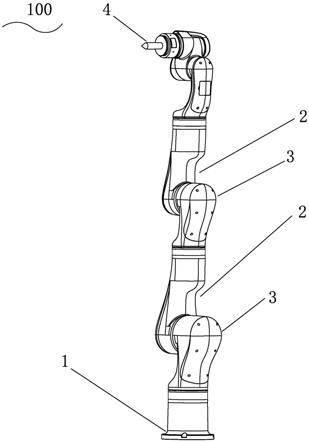
15.图1为根据本发明实施例自动安装玻璃机器人的立体图;图2为根据本发明实施例的执行工装的立体图;图3为根据本发明实施例的玻璃存放工装的立体图。
16.具体实施方式
17.以下将结合附图,详细描述本发明的优选实施例,对本发明做进一步阐述。
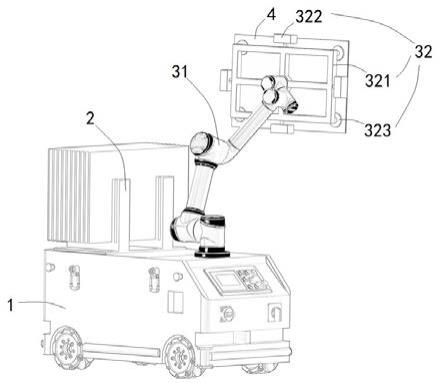
18.首先,将结合图1~3描述根据本发明实施例的自动安装玻璃机器人,用于为高铁安装玻璃4,其应用场景广阔。
19.如图1所示,本发明实施例的自动安装玻璃机器人,包含:控制模块、全向小车1、玻璃存放工装2与执行模块。
20.具体地,如图1所示,执行模块设置在全向小车1上,执行模块与控制模块电性连接,用于安装玻璃4。
21.进一步,如图1所示,全向小车1的车轮为麦克纳姆轮,提高了本实施例的作业灵活性。
22.进一步,如图1所示,执行模块包含:执行机械臂31与执行工装32;执行机械臂31的一端设置在全向小车1的顶部,用于控制执行工装32;执行工装32设置在执行机械臂31的另一端,执行工装32与控制模块电性连接,用于抓取玻璃4进行车窗安装作业,提高了高铁车窗装配作业效率低、人工成本高的缺陷。
23.进一步,如图1所示,执行机械臂31为六轴机械臂,使本实施例具备更高的作业灵活性。
24.进一步,如图1~2所示,执行工装32包含:支撑框架321、若干个传感器322与若干个吸盘323;支撑框架321的顶部与执行机械臂31的另一端固定连接;若干个吸盘323均匀分布在支撑框架321的底部,用于抓取玻璃4;若干个传感器322分别设置在支撑框架321的四周的侧壁上,当若干个吸盘323对玻璃4吸附到位时,若干个传感器322均与玻璃4的边缘对齐,用于感应车窗的安装位置。
25.进一步,如图2所示,传感器322为3d视觉传感器322,进一步提高了本实施例的装配精度,解决了现有技术中车窗装配精度低的缺陷。
26.具体地,如图1所示,玻璃存放工装2设置在全向小车1上,用于存放待安装的玻璃4。
27.进一步,如图1、3所示,玻璃存放工装2包含:承载底板21、存放支架22与若干对定位槽221;承载底板21设置在全向小车1的顶部;一对存放支架22对称设置在承载底板21的顶部;每一对定位槽221分别设置在一对存放支架22上,每一对定位槽221的位置相匹配,用于对玻璃4进行定位,使玻璃存放工装2可依序存储一列车辆单边的玻璃4数量。
28.具体地,如图1所示,控制模块与全向小车1和执行模块电性连接,用于控制全向小车1与执行模块。
29.进一步,如图1所示,控制模块包含:处理器(图上未示出)与控制器(图上未示出);控制器设置在全向小车1的内部,控制器与全向小车1、执行机械臂31、传感器322电性连接,用于控制全向小车1、执行机械臂31与传感器322进行装配作业,同时也用于处理并传递传感器322的检测数据;处理器与控制器电性连接,用于处理控制器传递的数据。
30.当本实施例运行时,控制器控制全向小车1移动到高铁车窗作业区域,并控制执行机械臂31带动执行工装32抓取玻璃4,当若干个传感器322分别与玻璃4的边缘对其时,执行工装32利用吸盘323抓取玻璃4,执行机械臂31控制执行工装32将玻璃4抓起并移动到高铁的车窗位置,传感器322发射红色激光照射玻璃4的边缘,当执行工装32抓取玻璃4移动到车窗的安装位置时,反射的激光会被传感器322内置的相机采集,确定车窗孔径的x、y、z的坐标值,紧接着控制器将采集到的坐标数据发送给处理器进行处理,处理器将处理产生的结果反馈给控制器,控制器控制执行机械臂31与执行工装32将玻璃4安装在车窗上。
31.以上,参照图1~3描述了根据本发明实施例的自动安装玻璃机器人,解决了现有技术中装配作业效率低、人工成本高与装配精度低的缺陷,极大的提高了高铁车窗玻璃4的装配质量,具有作业灵活性强的特点。
32.需要说明的是,在本说明书中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包含
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
33.尽管本发明的内容已经通过上述优选实施例作了详细介绍,但应当认识到上述的描述不应被认为是对本发明的限制。在本领域技术人员阅读了上述内容后,对于本发明的多种修改和替代都将是显而易见的。因此,本发明的保护范围应由所附的权利要求来限定。
技术特征:
1.一种自动安装玻璃机器人,其特征在于,包含:控制模块、全向小车、玻璃存放工装与执行模块;所述控制模块与所述全向小车和所述执行模块电性连接,用于控制所述全向小车与所述执行模块;所述玻璃存放工装设置在所述全向小车上,用于存放待安装的玻璃;所述执行模块设置在所述全向小车上,所述执行模块与所述控制模块电性连接,用于安装所述玻璃。2.如权利要求1所述自动安装玻璃机器人,其特征在于,所述全向小车的车轮为麦克纳姆轮。3.如权利要求1所述自动安装玻璃机器人,其特征在于,所述执行模块包含:执行机械臂与执行工装;所述执行机械臂的一端设置在所述全向小车的顶部;所述执行工装设置在所述执行机械臂的另一端,所述执行工装与所述控制模块电性连接。4.如权利要求3所述自动安装玻璃机器人,其特征在于,所述执行机械臂为六轴机械臂。5.如权利要求3所述自动安装玻璃机器人,其特征在于,所述执行工装包含:支撑框架、若干个传感器与若干个吸盘;所述支撑框架的顶部与所述执行机械臂的另一端固定连接;所述若干个吸盘均匀分布在所述支撑框架的底部,用于抓取所述玻璃;所述若干个传感器分别设置在所述支撑框架的四周的侧壁上。6.如权利要求5所述自动安装玻璃机器人,其特征在于,所述传感器为3d视觉传感器。7.如权利要求1所述自动安装玻璃机器人,其特征在于,所述玻璃存放工装包含:承载底板、存放支架与若干对定位槽;所述承载底板设置在所述全向小车的顶部;所述一对存放支架对称设置在所述承载底板的顶部;每一对所述定位槽分别设置在所述一对存放支架上,每一对所述定位槽的位置相匹配,用于对所述玻璃进行定位。8.如权利要求1所述自动安装玻璃机器人,其特征在于,所述控制模块包含:处理器与控制器;所述控制器设置在所述全向小车的内部,所述处理器与所述全向小车、所述执行模块电性连接;所述处理器与所述控制器电性连接,用于处理数据。
技术总结
本发明公开了一种自动安装玻璃机器人,包含:控制模块、全向小车、玻璃存放工装与执行模块;控制模块与全向小车和执行模块电性连接,用于控制全向小车与执行模块;玻璃存放工装设置在全向小车上,用于存放待安装的玻璃;执行模块设置在全向小车上,执行模块与控制模块电性连接,用于安装玻璃。本发明解决了现有技术中装配作业效率低、人工成本高与装配精度低的缺陷,极大的提高了高铁车窗玻璃的装配质量,具有作业灵活性强的特点。具有作业灵活性强的特点。具有作业灵活性强的特点。
技术研发人员:李光辉 王康元 王海怒 于滨 姚平
受保护的技术使用者:上海砾烽智能科技有限公司
技术研发日:2021.11.26
技术公布日:2022/3/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。