1.本发明属于机械臂领域,尤其涉及一种快递分拣机械臂。
背景技术:
2.众所周知,随着我国社会和经济以及互联网的高速发展,越来越多的人开始在网上购物,网购的诞生给人们带来了无尽的便利,同时岁的网络购物的诞生也使得快递行业蓬勃发展,随着越来越多的快递,人工分拣已经无法满足工作强度的需求了,于是机械臂给快递分拣带来了无尽的便捷,然后对于现有的快递分拣机械臂来说,其结构单一,只能在固定的位置进行往复运动,不能根据快递位置进行移动,同时针对不同大小的快递无法准确的改变高度,位置进行夹取,给快递分拣带来了些许不变。
技术实现要素:
3.本发明的目的是针对现有的技术存在上述问题,提出了一种快递分拣机械臂,本快递分拣机械臂能够准确的根据快递的位置大小来移动装置位置及机械手高度进行夹取。
4.本发明的目的可通过下列技术方案来实现:一种快递分拣机械臂,包括底座,所述底座上侧固定设有滑轨,所述滑轨右侧固定设有第一电机座,所述滑轨上侧滑动设有第二电机座,所述第二电机座下方设有螺纹孔,所述第一电机座左侧固定设有第一电机,所述第一电机输出端固定设有螺纹杆,所述螺纹杆与所述螺纹孔通过螺纹转动连接。
5.优选的,所述第二电机座上侧固定设有第二电机,所述第二电机上侧输出端固定设有第一电机轴,所述第一电机轴上侧固定设有第一支撑臂座,所述第一支撑臂座上方两侧分别固定设有第一支撑臂,所述第一支撑臂座上侧固定设有第三电机,所述第三电机右侧输出端固定设有第三电机轴,所述第三电机轴右侧固定设有小皮带轮,所述小皮带轮上滑动设有皮带。
6.优选的,所述第一支撑臂上端内侧转动设有第二支撑臂旋转轴,所述第二支撑臂旋转轴左端外侧固定设有大皮带轮,所述大皮带轮与所述皮带滑动连接,所述第二支撑臂旋转轴外侧左右两端分别固定设有第二支撑臂,所述第二支撑臂前端内侧转动设有第一支撑板旋转轴,所述第二支撑臂左侧固定设有第四电机座,所述第四电机座右侧固定设有第四电机,所述第四电机右侧输出端固定设有第四电机轴,所述第四电机轴与所述第一支撑板旋转轴固定连接。
7.优选的,所述第一支撑板旋转轴外侧固定设有第一支撑板,带动第一支撑板前侧固定设有机械手旋转电机,所述机械手旋转电机前侧输出端固定设有机械手旋转电机轴,所述机械手旋转电机轴前侧固定设有液压缸,所述液压缸前侧滑动设有液压杆,所述液压杆前端固定设有第二支撑板。
8.优选的,所述第二支撑板上侧固定设有齿轮旋转轴固定座,所述齿轮旋转轴固定座前端固定设有传感器,所述齿轮旋转轴固定座前端固定设有扫描仪,所述齿轮旋转轴固定座左端下侧转动设有第一齿轮旋转轴,所述第一齿轮旋转轴下侧固定设有第一齿轮,所
述第一齿轮前侧固定设有第一夹具,所述第一夹具前端右侧固定设有第一防滑垫,所述齿轮旋转轴固定座右端下侧转动设有第二齿轮旋转轴,所述第二齿轮旋转轴下侧固定设有第二齿轮,所述第二齿轮与所述第一齿轮啮合,所述第二齿轮前侧固定设有第二夹具,所述第二夹具前端左侧固定设有第二防滑垫。
9.优选的,所述第二支撑板下侧固定设有机械手齿轮转动电机座,所述机械手齿轮转动电机座上侧固定设有机械手齿轮转动电机,所述机械手齿轮转动电机上侧输出端固定设有机械手齿轮转动电机轴,所述机械手齿轮转动电机轴上侧固定设有机械手齿轮转动电机轴齿轮,所述机械手齿轮转动电机轴齿轮与所述第二齿轮啮合,所述机械手齿轮转动电机轴齿轮与所述第一齿轮啮合。
10.先启动的传感器和第一防滑垫,用来探测快递包裹的具体位置及大小,此时启动第一电机,此时将会带动螺纹杆旋转,从而使得第二电机座在底座上左右移动,从而使得装置移动到合适的位置,此时启动第二电机,第二电机将会带动第一电机轴旋转,从而带动第一支撑臂座旋转,从而带动整个装置旋转,这样不仅可以有效的探测到需要夹取的快递包裹的位置,而且可以增大整个装置的活动范围,从而更加方便快捷的夹取快递包裹。
11.此时启动第三电机,使得带动第三电机轴旋转,从而带动皮带转动,从而带动大皮带轮旋转,从而带动第二支撑臂旋转轴旋转,从而使得第二支撑臂能够上下旋转,此时第四电机启动,从而带动第四电机轴旋转,从而带动第一支撑板旋转轴旋转,从而使得第一支撑板能够上下旋转,此时启动机械手旋转电机,从而带动机械手旋转电机轴旋转,从而带动液压缸旋转,从而带动液压杆旋转,从而带动第二支撑板旋转,从而带动机械手旋转,这样能够根据快递包裹具体的位置大小来调节机械手的高度以及角度,能够更加快捷高效的完成夹取工作。
12.根据快递包裹的大小启动液压缸,从而使得液压杆能够伸长与缩短,从而使得机械手能够伸出与收缩,此时启动机械手齿轮转动电机,从而带动机械手齿轮转动电机轴旋转,从而带动机械手齿轮转动电机轴齿轮旋转,从而使得齿轮旋转轴固定座与第二齿轮旋转,从而使得第一夹具与第二夹具能够张开或者闭合,然后第二电机带动第一电机轴旋转,从而使得机械手旋转到快递包裹对应的位置,然后第一夹具和第二夹具张开将快递包裹放下,这样可以保证机械手能够准确牢固的夹紧快递包裹,而且可以能够增大旋转范围,便于快递包裹的放置。
13.与现有技术相比,本快递分拣机械臂具有以下优点:
14.1.不仅可以有效的探测到需要夹取的快递包裹的位置,而且可以增大整个装置的活动范围,从而更加方便快捷的夹取快递包裹。
15.2.能够根据快递包裹具体的位置大小来调节机械手的高度以及角度,能够更加快捷高效的完成夹取工作。
16.3.可以保证机械手能够准确牢固的夹紧快递包裹,而且可以能够增大旋转范围,便于快递包裹的放置。
附图说明
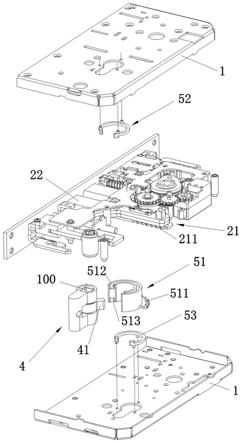
17.图1是快递分拣机械臂的结构示意图。
18.图2是快递分拣机械臂的正视图。
19.图3是快递分拣机械臂的右视图。
20.图4是图3中a-a方向剖视图。
21.图5是图3中b处结构放大图。
22.图中,10、底座;11、滑轨;12、第一电机座;13、第一电机;14、螺纹杆;15、第二电机座;16、第二电机;17、第一电机轴;18、第一支撑臂座;19、第一支撑臂;20、第三电机;21、第三电机轴;22、皮带;23、大皮带轮;24、第四电机轴;25、第二支撑臂;26、第二支撑臂旋转轴;27、第一支撑板旋转轴;28、第一支撑板;29、第四电机座;30、第四电机;31、机械手旋转电机;32、机械手旋转电机轴;33、液压缸;34、液压杆;35、第二支撑板;36、齿轮旋转轴固定座;37、第一夹具;38、第二齿轮;39、小皮带轮;40、扫描仪;41、传感器;42、第一防滑垫;43、第二齿轮旋转轴;44、机械手齿轮转动电机轴齿轮;45、机械手齿轮转动电机轴;46、机械手齿轮转动电机;47、机械手齿轮转动电机座;48、第一齿轮旋转轴;49、第一齿轮;50、第二夹具;51、第二防滑垫;52、螺纹孔。
具体实施方式
23.以下是本发明的具体实施例并结合附图,对本发明的技术方案作进一步的描述,但本发明并不限于这些实施例。
24.如图1所示,一种快递分拣机械臂,包括底座10,底座10上侧固定设有滑轨11,滑轨11右侧固定设有第一电机座12,滑轨11上侧滑动设有第二电机座15,第二电机座15下方设有螺纹孔52,第一电机座12左侧固定设有第一电机13,第一电机13输出端固定设有螺纹杆14,螺纹杆14与螺纹孔52通过螺纹转动连接。
25.如图1、图2和图4所示,第二电机座15上侧固定设有第二电机16,第二电机16上侧输出端固定设有第一电机轴17,第一电机轴17上侧固定设有第一支撑臂座18,第一支撑臂座18上方两侧分别固定设有第一支撑臂19,第一支撑臂座18上侧固定设有第三电机20,第三电机20右侧输出端固定设有第三电机轴21,第三电机轴21右侧固定设有小皮带轮39,小皮带轮39上滑动设有皮带22。
26.如图1和图2所示,第一支撑臂19上端内侧转动设有第二支撑臂旋转轴26,第二支撑臂旋转轴26左端外侧固定设有大皮带轮23,大皮带轮23与皮带22滑动连接,第二支撑臂旋转轴26外侧左右两端分别固定设有第二支撑臂25,第二支撑臂25前端内侧转动设有第一支撑板旋转轴27,第二支撑臂25左侧固定设有第四电机座29,第四电机座29右侧固定设有第四电机30,第四电机30右侧输出端固定设有第四电机轴24,第四电机轴24与第一支撑板旋转轴27固定连接。
27.如图1所示,第一支撑板旋转轴27外侧固定设有第一支撑板28,带动第一支撑板28前侧固定设有机械手旋转电机31,机械手旋转电机31前侧输出端固定设有机械手旋转电机轴32,机械手旋转电机轴32前侧固定设有液压缸33,液压缸33前侧滑动设有液压杆34,液压杆34前端固定设有第二支撑板35。
28.如图2所示,第二支撑板35上侧固定设有齿轮旋转轴固定座36,齿轮旋转轴固定座36前端固定设有传感器41,齿轮旋转轴固定座36前端固定设有扫描仪40,齿轮旋转轴固定座36左端下侧转动设有第一齿轮旋转轴48,第一齿轮旋转轴48下侧固定设有第一齿轮49,第一齿轮49前侧固定设有第一夹具37,第一夹具37前端右侧固定设有第一防滑垫42,齿轮
旋转轴固定座36右端下侧转动设有第二齿轮旋转轴43,第二齿轮旋转轴43下侧固定设有第二齿轮38,第二齿轮38与第一齿轮49啮合,第二齿轮38前侧固定设有第二夹具50,第二夹具50前端左侧固定设有第二防滑垫51。
29.如图3和图5所示,第二支撑板35下侧固定设有机械手齿轮转动电机座47,机械手齿轮转动电机座47上侧固定设有机械手齿轮转动电机46,机械手齿轮转动电机46上侧输出端固定设有机械手齿轮转动电机轴45,机械手齿轮转动电机轴45上侧固定设有机械手齿轮转动电机轴齿轮44,机械手齿轮转动电机轴齿轮44与第二齿轮38啮合,机械手齿轮转动电机轴齿轮44与第一齿轮49啮合。
30.先启动的传感器41和第一防滑垫42,用来探测快递包裹的具体位置及大小,此时启动第一电机13,此时将会带动螺纹杆14旋转,从而使得第二电机座15在底座10上左右移动,从而使得装置移动到合适的位置,此时启动第二电机16,第二电机16将会带动第一电机轴17旋转,从而带动第一支撑臂座18旋转,从而带动整个装置旋转,这样不仅可以有效的探测到需要夹取的快递包裹的位置,而且可以增大整个装置的活动范围,从而更加方便快捷的夹取快递包裹。
31.此时启动第三电机20,使得带动第三电机轴21旋转,从而带动皮带22转动,从而带动大皮带轮23旋转,从而带动第二支撑臂旋转轴26旋转,从而使得第二支撑臂25能够上下旋转,此时第四电机30启动,从而带动第四电机轴24旋转,从而带动第一支撑板旋转轴27旋转,从而使得第一支撑板28能够上下旋转,此时启动机械手旋转电机31,从而带动机械手旋转电机轴32旋转,从而带动液压缸33旋转,从而带动液压杆34旋转,从而带动第二支撑板35旋转,从而带动机械手旋转,这样能够根据快递包裹具体的位置大小来调节机械手的高度以及角度,能够更加快捷高效的完成夹取工作。
32.根据快递包裹的大小启动液压缸33,从而使得液压杆34能够伸长与缩短,从而使得机械手能够伸出与收缩,此时启动机械手齿轮转动电机46,从而带动机械手齿轮转动电机轴45旋转,从而带动机械手齿轮转动电机轴齿轮44旋转,从而使得齿轮旋转轴固定座36与第二齿轮38旋转,从而使得第一夹具37与第二夹具50能够张开或者闭合,然后第二电机16带动第一电机轴17旋转,从而使得机械手旋转到快递包裹对应的位置,然后第一夹具37和第二夹具50张开将快递包裹放下,这样可以保证机械手能够准确牢固的夹紧快递包裹,而且可以能够增大旋转范围,便于快递包裹的放置。
33.以上所述仅为本发明的实施例,并非因此限制本发明的专利保护范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。