1.本发明属于机器人导航与控制技术领域,特别涉及一种基于蓝牙的无线控制模块及其控制方法。
背景技术:
2.近年来,尽管机器人相关技术获得飞速发展,但主要集中在机器人智能化等算法软件方面的研究,而在硬件结构方面基本仍采用传统机器人的那一套硬件系统结构,不能满足同时代机器人技术的应用需求,尤其是在驱动与控制方面,例如,打开一台工业机器人的控制箱,里面往往是专用的控制和驱动板卡,控制器经常是通过专用的背板总线来传输相应的控制信号,来实现对执行器的控制,这往往会造成机器人应用的局限,主要体现在以下三方面:
3.1)专用的控制和驱动板卡以及庞大的总线系统占据了机器人系统大量的可用空间,使得机器人载荷低、续航短、搭载的传感器量测能力有限的问题愈发突出,同时控制器和总线系统的空间布局也对机器人相应的机械结构设计造成较大的约束,增大了机器人硬件系统的复杂度;
4.2)控制信号在有线传输过程中容易受到干扰,可能导致信号丢失,而且信号传输响应时间较长,因此需要采取特定的措施保证信号可靠快速地传输,使得机器人系统的控制难度大大提升;
5.3)机器人控制系统通过背板总线来传输相应的控制信号,一旦控制总线接错、漏接或者发生故障,其硬件检修和更换起来也比较困难.
6.在复杂的任务环境中,单个机器人的总线控制系统在硬件设计、检测、通信等方面存在局限性,而在机器人系统中采用无线控制的方式,可以有效节省机器人系统的可用空间,方便机器人的机械结构设计,大大减小机器人硬件系统的复杂度,且在机器人控制、通信以及故障检修过程中方便而有效,具有显著的优势和广阔的应用前景。
技术实现要素:
7.本发明克服了现有技术的不足之一,提供了一种基于蓝牙的无线控制模块及其控制方法,能够有效节省机器人系统的可用空间,减小机器人硬件系统的复杂度,且在机器人控制、通信以及故障检修过程中方便而有效,具有显著的优势和广阔的应用前景。
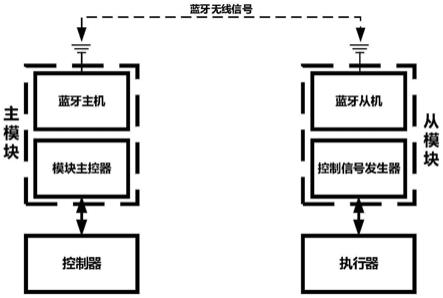
8.根据本公开的一方面,本发明提供一种基于蓝牙的无线控制模块,所述模块包括:控制器、主模块、从模块和执行器;
9.其中,控制器,所述控制器与所述主模块相连接,用于根据实时任务产生控制信号,将所述控制信号传输到所述主模块;
10.主模块,用于将所述控制信号转换为控制指令,将所述控制指令通过蓝牙无线数据传输方式传输到所述从模块;
11.从模块,用于将所述控制指令转换为执行控制信号,将所述执行控制信号传输至
执行器;
12.执行器,用于根据所述执行控制信号控制外接设备执行相应的动作。
13.在一种可能的实现方式中,所述主模块包括蓝牙主机和模块主控器;
14.其中,所述模块主控器,用于将所述控制信号转换为控制指令,并将所述控制指令传输至蓝牙主机;
15.所述蓝牙主机,用于将所述控制指令通过蓝牙无线数据传输方式传输至从模块。
16.在一种可能的实现方式中,所述从模块包括蓝牙从机和控制信号发生器;
17.其中,所述蓝牙从机,用于和所述蓝牙主机进行双线蓝牙无线通讯,将接收到的控制指令发送到所述控制信号发生器;
18.所述控制信号发生器,用于将所述控制指令转换为所述执行器能够执行的执行控制信号。
19.根据本公开的另一方面,提出了一种基于蓝牙的无线控制方法,所述方法包括:
20.步骤s1:控制器根据实时任务产生相应的控制信号,发送所述控制信号到模块主控器,所述模块主控器将所述控制信号转换为控制命令后,将所述控制命令转发至蓝牙主机;
21.步骤s2:所述蓝牙主机通过蓝牙无线数据传输方式将所述控制命令发送至蓝牙从机;
22.步骤s3:蓝牙从机将所述控制命令发送至控制信号发生器,所述控制指令经所述控制信号发生器转换为执行控制信号后发送至执行器,所述执行器根据所述执行控制信号控制外接设备执行相应的动作。
23.在一种可能的实现方式中,控制器根据实时任务产生相应的控制信号,发送所述控制信号到模块主控器,所述模块主控器将所述控制信号转换为控制命令后,将所述控制命令转发至蓝牙主机,包括:
24.步骤s11:控制器根据实时任务产生相应的控制信号,发送所述控制信号到模块主控器;
25.步骤s12:模块主控器延时等待预定时间,如果控制接收完成,执行步骤s13,否则返回步骤s11;
26.步骤s13:模块主控器将所述控制信号转换为控制命令,转发至蓝牙主机。
27.在一种可能的实现方式中,所述蓝牙主机通过蓝牙无线数据传输方式将所述控制命令发送至蓝牙从机,包括:
28.步骤s21:蓝牙主机将控制命令通过蓝牙无线数据传输的方式发送至蓝牙从机;
29.步骤s22:若当前控制命令发送成功,则执行步骤s23,否则执行步骤s21;
30.步骤s23:检测和/或重连所述蓝牙主机与蓝牙从机之间的蓝牙断线,若检测到蓝牙信号正常,则执行步骤s3,否则,发送at指令到蓝牙从机进行重新连接。
31.在一种可能的实现方式中,所述蓝牙从机将所述控制命令发送至控制信号发生器,所述控制指令经所述控制信号发生器转换为执行控制信号后发送至执行器,所述执行器根据所述执行控制信号控制外接设备执行相应的动作,包括:
32.步骤s31:若蓝牙从机接收的控制命令的数据正常,则执行步骤s32,否则,执行步骤s33;
33.步骤s32:控制信号发生器将控制命令转换为执行器所需的执行控制信号,执行步骤s34;
34.步骤s33:控制信号发生器根据执行器的状态和控制要求,产生特定的执行控制信号,执行步骤s34,其中所述特定的执行控制信号为安全控制信号;
35.步骤s34:执行器根据执行控制信号控制外接设备执行相应动作。
36.本发明的基于蓝牙的无线控制模块,包括:控制器、主模块、从模块和执行器;其中,控制器与主模块相连接,用于根据实时任务产生控制信号,将控制信号传输到所述主模块;主模块用于将所述控制信号转换为控制指令,将控制指令通过蓝牙无线数据传输方式传输到所述从模块;从模块用于将控制指令转换为执行控制信号,将所述执行控制信号传输至执行器;执行器用于根据执行控制信号控制外接设备执行相应的动作。能够有效节省机器人系统的可用空间,减小机器人硬件系统的复杂度,且在机器人控制、通信以及故障检修过程中方便而有效,具有显著的优势和广阔的应用前景。
附图说明
37.附图用来提供对本技术的技术方案或现有技术的进一步理解,并且构成说明书的一部分。其中,表达本技术实施例的附图与本技术的实施例一起用于解释本技术的技术方案,但并不构成对本技术技术方案的限制。
38.图1示出了根据本公开一实施例的基于蓝牙的无线控制模块的原理框图;
39.图2示出了根据本公开一实施例的基于蓝牙的无线控制方法流程图;
40.图3示出了根据本公开一实施例的步骤s1的进一步方法流程图;
41.图4示出了根据本公开一实施例的步骤s2的进一步方法流程图;
42.图5示出了根据本公开一实施例的步骤s3的进一步方法流程图。
具体实施方式
43.以下将结合附图及实施例来详细说明本发明的实施方式,借此对本发明如何应用技术手段来解决技术问题,并达到相应技术效果的实现过程能充分理解并据以实施。本技术实施例以及实施例中的各个特征,在不相冲突前提下可以相互结合,所形成的技术方案均在本发明的保护范围之内。
44.另外,附图的流程图示出的步骤可以在诸如一组计算机可执行指令的计算机中执行。并且,虽然在流程图中示出了逻辑顺序,但是在某些情况下,可以以不同于此处的顺序执行所示出或描述的步骤。
45.图1示出了根据本公开一实施例的基于蓝牙的无线控制模块的原理框图。如图1所示,该模块可以包括:控制器、主模块、从模块和执行器。
46.其中,控制器与主模块相连接,根据实时任务产生控制信号,将控制信号传输到主模块。即控制器能够将根据实时任务要求产生相应的控制信号,并将控制信号发送至模块主控器。
47.主模块,用于将控制信号转换为控制指令,将控制指令通过蓝牙无线数据传输方式传输到从模块。其中,如图1所示,主模块包括蓝牙主机和模块主控器。模块主控器,用于将控制信号转换为控制指令,并将控制指令传输至蓝牙主机。蓝牙主机,用于将控制指令通
过蓝牙无线数据传输方式传输至从模块,从而实现与控制器进行信息交换。
48.从模块,用于将控制指令转换为执行控制信号,将执行控制信号传输至执行器。其中,从模块包括蓝牙从机和控制信号发生器;蓝牙从机,用于和蓝牙主机进行双线蓝牙无线通讯,将接收到的控制指令发送到控制信号发生器;控制信号发生器,用于将控制指令转换为所述执行器能够执行的执行控制信号。蓝牙主机和蓝牙从机实现双向的蓝牙无线通讯,实现控制指令的无线传输。
49.执行器,用于根据执行控制信号控制外接设备执行相应的动作。即执行器能够按照控制信号发生器产生的控制信号,控制系统的机械结构完成相应动作。
50.本发明的基于蓝牙的无线控制模块,包括:控制器、主模块、从模块和执行器;其中,控制器与主模块相连接,用于根据实时任务产生控制信号,将控制信号传输到所述主模块;主模块用于将所述控制信号转换为控制指令,将控制指令通过蓝牙无线数据传输方式传输到所述从模块;从模块用于将控制指令转换为执行控制信号,将所述执行控制信号传输至执行器;执行器用于根据执行控制信号控制外接设备执行相应的动作。通过蓝牙主从机之间无线传输控制信号数据,能够有效实现控制器对执行器的蓝牙无线控制,具有显著的优势和广阔的应用前景。
51.图2示出了根据本公开一实施例的基于蓝牙的无线控制方法流程图。
52.根据本公开的另一方面,本公开提出了一种基于蓝牙的无线控制方法。如图2所示,该方法可以包括:
53.步骤s1:控制器根据实时任务产生相应的控制信号,发送控制信号到模块主控器,模块主控器将所述控制信号转换为控制命令后,将控制命令转发至蓝牙主机。
54.图3示出了根据本公开一实施例的步骤s1的进一步方法流程图。
55.在一示例中,如图3所示,步骤s1可以包括:
56.步骤s11:控制器根据实时任务产生相应的控制信号,发送所述控制信号到模块主控器;
57.步骤s12:模块主控器延时等待预定时间,如果控制接收完成,执行步骤s13,否则返回步骤s11;
58.步骤s13:模块主控器将控制信号转换为控制命令,转发至蓝牙主机。
59.蓝牙主机将控制命令以蓝牙无线数据传输的方式向蓝牙从机发送,若当前控制命令发送完成,则执行步骤s2。
60.步骤s2:蓝牙主机通过蓝牙无线数据传输方式将控制命令发送至蓝牙从机。
61.图4示出了根据本公开一实施例的步骤s2的进一步方法流程图;
62.在一示例中,步骤s2可以包括:
63.步骤s21:蓝牙主机将控制命令通过蓝牙无线数据传输的方式发送至蓝牙从机;
64.步骤s22:若当前控制命令发送成功,则执行步骤s23,否则执行步骤s21;
65.步骤s23:检测和/或重连所述蓝牙主机与蓝牙从机之间的蓝牙断线,若检测到蓝牙信号正常,则执行步骤s3,否则,发送at指令到蓝牙从机进行重新连接,执行步骤s3。
66.步骤s3:蓝牙从机将控制命令发送至控制信号发生器,控制指令经控制信号发生器转换为执行控制信号后发送至执行器,执行器根据执行控制信号控制外接设备执行相应的动作。
67.图5示出了根据本公开一实施例的步骤s3的进一步方法流程图
68.在一示例中,如图5所示,步骤s3可以包括:
69.步骤s31:若蓝牙从机接收的控制命令的数据正常,则执行步骤s32,否则,执行步骤s33;
70.步骤s32:控制信号发生器将控制命令转换为执行器所需的执行控制信号,执行步骤s34;
71.步骤s33:控制信号发生器根据执行器的状态和控制要求,产生特定的执行控制信号,执行步骤s34,其中所述特定的执行控制信号为安全控制信号;
72.步骤s34:执行器根据执行控制信号控制外接设备执行相应动作。
73.本发明的基于蓝牙无线传输的无线控制方法,可以有效节省机器人系统的可用空间,方便机器人的机械结构设计,大大减小机器人硬件系统的复杂度,在机器人控制、通信以及故障检修过程中方便而有效。通过采用基于蓝牙的无线控制方式实现机器人的控制,可以避免控制信号在有线传输过程中受到的干扰,并通过蓝牙断连检测与保护措施,可以有效实现控制信号可靠快速地传输,降低机器人系统的控制难度,提高机器人控制系统控制的鲁棒性。
74.虽然本发明所揭露的实施方式如上,但所述的内容只是为了便于理解本发明而采用的实施方式,并非用以限定本发明。任何本发明所属技术领域内的技术人员,在不脱离本发明所揭露的精神和范围的前提下,可以在实施的形式上及细节上作任何的修改与变化,但本发明的专利保护范围,仍须以所附的权利要求书所界定的范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。