1.本发明涉及医疗器械,尤其涉及一种用于变刚度机械臂的锁定结构。
背景技术:
2.随着医疗相关领域技术的发展,微创手术已经在外科手术中有所普及,用于人体腔道和脏器的手术机器人也越来越多。
3.手术机器人的刚度高,在与身体腔脏、器官、血管和敏感组织接触时容易造成意外损伤;手术机器人的刚度低,会在进入弯曲复杂的自然腔道时产生意外扭曲,以致难以前进。当手术机器人具有变刚度的能力时,在遇到需要支撑器官组织、保持末端定位精准、提升末端施加力时,可以提高自身刚度;在需要减小与周围环境接触力时,可以降低自身刚度,所以变刚度手术机器人已成为手术机器人领域的研究热点。
4.目前机器人常用的变刚度方式有:(1)在机器人关节处使用低熔点金属,需要降低机器人刚度时加热关节处金属使其成为液态,需要提高机器人刚度时则冷却关节处金属使其成为固态(2)在机器人壳体上设计异型结构并套上真空罩,提升刚度时将真空罩抽真空,让异形结构接触,产生摩擦力以保持高刚度状态。(3)在机器人内部装有真空管,管内有许多小型颗粒,当需要提升机器人刚度时,将真空管抽真空,管内颗粒相互挤压产生摩擦力,以保持高刚度状态。
5.以上三种方法各自有低响应速度、制造困难、体积大等缺点。因此急需开发一种响应速度更快、体积更小、变刚度效果更好的微创手术机器人变刚度机构。
技术实现要素:
6.为了解决现有技术中的问题,本发明提供了一种用于变刚度机械臂的锁定结构。
7.本发明提供了一种用于变刚度机械臂的锁定结构,包括触发模块、旋转模块、锁定模块和外壳,所述触发模块、旋转模块、锁定模块分别安装在所述外壳上;所述旋转模块包括换向结构和旋转顶起结构,所述换向结构上设有深槽和浅槽,旋转顶起结构能够沿所述外壳向前向后运动,并且能够进行转动;所述锁定模块包括转动结构和插入齿结构,所述转动结构与所述外壳转动连接,所述转动结构能够相对所述外壳进行转动,用于角度调节,所述插入齿结构能够沿所述外壳向前向后运动,但不能够相对所述外壳转动;所述旋转顶起结构的一端与所述转动结构连接,另一端上设有叶片,所述叶片与所述换向结构上的深槽或浅槽配合,或者,所述叶片与所述触发模块配合;锁定时,所述触发模块驱动所述旋转顶起结构向前运动,当所述旋转顶起结构的叶片被顶出所述换向结构的深槽时,所述触发模块驱动所述旋转顶起结构的叶片落入所述换向结构的浅槽,所述旋转顶起结构驱动所述插入齿结构向前插入所述转动结构并锁定,限制转动结构的旋转以实现关节角度的锁定;解锁时,所述触发模块驱动所述旋转顶起结构向前运动,当所述旋转顶起结构的
叶片被顶出所述换向结构的浅槽时,所述触发模块驱动所述旋转顶起结构的叶片落入所述换向结构的深槽,所述旋转顶起结构驱动所述插入齿结构向后脱离所述转动结构并解锁,完成关节解锁。
8.所述触发模块包括远端电机、第一弹簧、一体式推动件、连接盘和线绳,所述远端电机与所述连接盘连接,所述线绳的一端与所述连接盘连接,另一端与所述一体式推动件连接,所述第一弹簧用于所述一体式推动件的复位,所述一体式推动件安装在所述外壳上,所述一体式推动件能够沿所述外壳向前向后运动;当远端电机通过线绳拉动一体式推动件向前运动时,第一弹簧被压缩,当远端电机松开线绳时,在第一弹簧的弹力作用下,一体式推动件向后复位。
9.作为本发明的进一步改进,所述一体式推动件上设有三角形凸起,所述旋转顶起结构的叶片的端面为与所述三角形凸起相配合的斜面,所述换向结构的深槽和浅槽的槽底均为与所述叶片的端面相配合的斜面。
10.作为本发明的进一步改进,所述旋转模块还包括第二弹簧,所述第二弹簧用于所述插入齿结构的复位,当所述插入齿结构向前运动时,所述第二弹簧压缩。
11.作为本发明的进一步改进,所述转动结构上设有锁定凹槽,所述插入齿结构上设有与所述锁定凹槽相配合的凸齿。
12.作为本发明的进一步改进,锁定时,所述远端电机通过线绳拉动一体式推动件从初始位置向前运动,一体式推动件将旋转顶起结构的叶片顶出所述换向结构的深槽,所述一体式推动件的三角形凸起与旋转顶起结构的叶片的端面相贴合接触,在所述第二弹簧的弹力作用下,旋转顶起结构的叶片的端面沿着一体式推动件的三角形凸起进行运动,产生旋转,直至旋转顶起结构的叶片的端面到达一体式推动件的三角形凸起的凹陷处,待远端电机放松线绳后,一体式推动件被第一弹簧的弹力推回初始位置,旋转顶起结构的叶片的端面落入换向结构,在所述第二弹簧的弹力作用下,旋转顶起结构的叶片的端面沿着换向结构的浅槽的槽底进行运动,产生旋转,直至旋转顶起结构的叶片的端面到达换向结构的浅槽的凹陷处,所述旋转顶起结构驱动所述插入齿结构的凸齿向前插入所述转动结构的锁定凹槽,限制转动结构的旋转以实现关节角度的锁定;解锁时,所述远端电机通过线绳拉动一体式推动件从初始位置向前运动,一体式推动件将旋转顶起结构的叶片顶出所述换向结构的浅槽,所述一体式推动件的三角形凸起与旋转顶起结构的叶片的端面相贴合接触,在所述第二弹簧的弹力作用下,旋转顶起结构的叶片的端面沿着一体式推动件的三角形凸起进行运动,产生旋转,直至旋转顶起结构的叶片的端面到达一体式推动件的三角形凸起的凹陷处,待远端电机放松线绳后,一体式推动件被第一弹簧的弹力推回初始位置,旋转顶起结构的叶片的端面落入换向结构,在所述第二弹簧的弹力作用下,旋转顶起结构的叶片的端面沿着换向结构的深槽的槽底进行运动,产生旋转,直至旋转顶起结构的叶片的端面到达换向结构的深槽的凹陷处,所述旋转顶起结构驱动所述插入齿结构的凸齿向后脱离所述转动结构的锁定凹槽,完成关节解锁;作为本发明的进一步改进,所述一体式推动件的外壁上设有竖直槽,所述换向结构的内壁上设有突起,所述突起与所述竖直槽相配合,以限定所述一体式推动件的旋转自由度。
13.作为本发明的进一步改进,所述一体式推动件顶部具有至少8个对称分布的三角
形凸起,用于制造旋转顶起结构在推进过程中的旋转。
14.作为本发明的进一步改进,所述三角形凸起的凹陷处分别与深槽的凹陷以及浅槽的凹陷处相错开。
15.作为本发明的进一步改进,所述一体式推动件、旋转顶起结构、换向结构、转动结构和插入齿结构上均设有供线绳穿过的通孔,所述线绳自所述一体式推动件依次向前穿过换向结构、旋转顶起结构、插入齿结构和转动结构,然后固定在连接盘上。
16.本发明的有益效果是:外形小巧,锁定后关节刚度更高,响应时间更快,有效避免了传统微创手术机器人用于提高关节刚度方式响应时间较长、关节刚度提升小的缺陷,并且可更换性强,有效提高了微创手术机器人的精度和复杂手术任务的适应性。
附图说明
17.为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的方案。
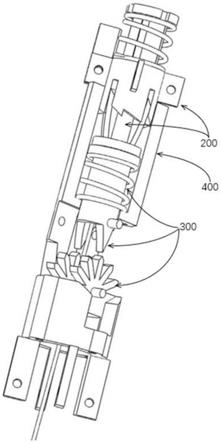
18.图1a是本发明一种用于变刚度机械臂的锁定结构的不显示一半外壳的组装示意图。
19.图1b是本发明一种用于变刚度机械臂的锁定结构的组装示意图。
20.图2a是本发明一种用于变刚度机械臂的锁定结构的触发模块的示意图。
21.图2b是本发明一种用于变刚度机械臂的锁定结构的一体式推动件的示意图。
22.图3a是本发明一种用于变刚度机械臂的锁定结构的旋转模块的示意图。
23.图3b是本发明一种用于变刚度机械臂的锁定结构的换向结构的示意图。
24.图4a是本发明一种用于变刚度机械臂的锁定结构的外壳的示意图。
25.图4b是本发明一种用于变刚度机械臂的锁定结构的锁定模块的示意图。
26.图4c是本发明一种用于变刚度机械臂的锁定结构的锁定模块的分解示意图。
27.图5是本发明一种用于变刚度机械臂的锁定结构的关节锁定和解锁流程图以及旋转顶起结构和一体式推动件、换向结构的接触部分的局部特写。
具体实施方式
28.需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
29.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明保护范围的限制。此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”等的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
30.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本发明中的具体含义。
31.下面结合附图说明及具体实施方式对本发明作进一步说明。
32.本发明提供了一种用于变刚度机械臂的锁定结构,图1a、图1b为本发明的一个实施例中一种用于变刚度机械臂的锁定结构的结构图,包括触发模块100、旋转模块200、锁定模块300和外壳400。锁定模块300由带有栅栏3014的转动结构301、插入齿结构302和弹簧303构成,插入齿结构302在触发模块100和旋转模块200的配合运动下,可以实现插入和退出带有栅栏3014的转动结构300的锁定凹槽30113中,以实现关节的锁定和解锁。
33.图2a是本发明的一个实施例中触发模块100三维结构示意图,包括远端电机101、第一弹簧102、一体式推动件103、连接盘104、螺钉105和线绳106。一体式推动件103有通孔,有线绳106穿过通孔与连接盘104连接,连接盘104通过螺钉105和电机101连接。在远端电机101的转动下,一体式推动件103被拉动,远端电机101放松后,一体式推动件103在第一弹簧102的作用下回到原位。
34.图2b是本发明的一个实施例中一体式推动件103三维结构示意图,展示了一体式推动件103的结构细节,所述一体式推动件103外壁上可有4个或更多竖直槽1032,用于与换向结构201内壁上的凸起2014配合,以限定一体式推动件103的旋转自由度,所述一体式推动件103顶端可有8个或更多对称分布的三角形凸起1031,用于制造旋转顶起结构202在推进过程中的旋转。
35.图3a、图3b是本发明的一个实例中旋转模块200三维示意图,旋转模块200由1个换向结构201和1个旋转顶起结构202构成。换向结构201上的孔2013用于螺钉安装,换向结构201内部通孔圆周有4个对称分布的凸起2014,用于限制一体式推动件103的旋转自由度,所述旋转顶起结构202包含4个周向分布的叶片2021,叶片2021末端有斜面,旋转顶起结构202的顶部为一圆盘,用于和插入齿结构302形成面接触;关节锁定过程中,旋转顶起结构202在一体式推动件103的推动下,向前运动离开深槽2011并旋转,在远端电机101放松后,第一弹簧102将一体式推动件103回推,旋转顶起结构202在第二弹簧303的推动下落入浅槽2012;关节解锁过程中,旋转顶起结构202在一体式推动件103的推动下,向前运动离开浅槽2012并旋转,在远端电机101放松后,第一弹簧102将一体式推动件103回推,旋转顶起结构202在第二弹簧303的推动下落入深槽2011。
36.图4a、图4b是本发明的一个实例中锁定模块300三维示意图,外壳400由两瓣相同的壳体构成,外壳400内有通孔,用于容纳其余模块和手术工具,外壳400上的孔403用于螺钉安装,锁定模块300由1个带有栅栏3014的转动结构301、1个插入齿结构302和1个第二弹簧303构成。关节锁定过程中,插入齿结构302被旋转顶起结构202推动向前进入带有栅栏的转动结构301的锁定凹槽3013中,限制转动结构301的旋转以实现关节角度的锁定;关节解锁过程中,旋转顶起结构202离开浅槽2012转向深槽2011,第二弹簧303将插入齿结构302和旋转顶起结构202一并回推,插入齿结构302退出锁定凹槽3013,关节解锁。
37.图4c是本发明的一个实施例中插入齿结构302和带有栅栏的转动结构301三维结构示意图,展示了插入齿结构302的凸齿3022和带有栅栏3014的转动结构301的锁定凹槽
3013,锁定凹槽3013由多个栅栏3014呈扇形布置而成,凸齿3022用于插入锁定凹槽3013,实现关节锁定,转动结构301上的安装孔3011用于螺钉安装,转动结构301上的圆柱销3012与外壳400上的孔401配合,用于实现转动结构301的转动,插入齿结构302上的圆柱销2021与外壳400上的槽402配合,用于实现插入齿结构302的前后运动。
38.图5是本发明的一个实施例中关节锁定和解锁流程的三维结构示意图,远端电机101驱动触发模块100中的一体式推动件103向前运动,一体式推动件103推动旋转机构200中旋转顶起结构202向前运动,由于一体式推动件103上方的三角形凸起1031间的凹陷处分布与换向结构201的深槽2011与浅槽2012的分布有一定夹角,当旋转顶起结构202被顶出深槽2011或浅槽2012时,旋转顶起结构202与一体式推动件103的接触位置距离一体式推动件103上方的三角形凸起1031间的凹陷处仍有一定空间,见图5的特写1,由于第二弹簧303的压力,旋转顶起结构202会顺着与一体式推动件103上方的三角形凸起1031接触的面进行运动,产生旋转落入三角形凸1031起间凹陷处,见图5特写2,待远端电机101放松线绳后,一体式推动件103被第一弹簧102推回原位,旋转顶起202落到换向结构201上端的斜坡结构上,见图5特写3,再顺势被第二弹簧303推入浅槽2012中,锁定模块300中的插入齿结构302被旋转顶起202推动向前插入带有栅栏的转动结构301的锁定凹槽3013中完成关节锁定,远端电机101放松线绳,一体式推动件103被第一弹簧102推回原位;远端电机101再次驱动触发模块100中的一体式推动件103向前运动,一体式推动件103推动旋转机构200中旋转顶起结构202向前运动,由于一体式推动件103上方三角形凸起1031间的凹陷处分布与换向结构201的深槽2011与浅槽2012的分布有一定夹角,当旋转顶起结构202被顶出深槽2011或浅槽2012时,旋转顶起结构202与一体式推动件103的接触位置距离一体式推动件103上方的三角形凸起1031间的凹陷处仍有一定空间,见图5特写4,由于第二弹簧303的压力,旋转顶起结构202会顺着与一体式推动件103上方的三角形凸起1031接触的面进行运动,产生旋转落入三角形凸起1031间凹陷处,见图5特写5,待远端电机101放松线绳后,一体式推动件103被第一弹簧102推回原位,旋转顶起202落到换向结构201上端的斜坡结构上,再顺势被第二弹簧303推入深槽2011中,锁定模块300中的插入齿结构302被第二弹簧303推动向后脱离带有栅栏的转动结构301完成关节解锁,远端电机101放松线绳,一体式推动件103被第一弹簧102推回原位。
39.本发明提供的一种用于变刚度机械臂的锁定结构,可通过改变所述可锁定关节的安装方向,变更机器人的弯曲方式,用于满足不同微创手术的需求。
40.本发明提供的一种用于变刚度机械臂的锁定结构,不需要通过外加真空膜和板载电机,就通过远端电机对绳索的拉动,就可以实现关节特定角度的锁定,相比市面上常见的变刚度关节,该锁定结构的刚度改变更迅速可靠,驱动方式也更简单。
41.本发明提供的一种用于变刚度机械臂的锁定结构,适用于复杂自然腔道的线驱微创手术机器人。
42.以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。