1.本发明属于精密测量技术领域,具体涉及一种可释放热变形的高精度六自由度微位移工作台系统。
背景技术:
2.随着超精密加工和微细加工技术的快速发展,以mems为基础的微型传感器和微型测量仪器广泛应用于各个领域,这些越发趋于小型化和微型化的元器件对于高精度的测量与定位提出了越来越高的要求。微位移工作台作为精密定位技术中一个不可或缺的组成部分,能够提供精度具有纳米级分辨率的微米级进给位移,因而在精密定位技术研究中成为重要因素和重要成果之一。在三坐标测量机中,高精度的微位移工作台可用于对工件的微进给和微定位,实现精密测量。
3.多自由度微动工作台作为微定位部件应用于三坐标测量机时,微动工作台多是作为简单的驱动部件,利用微动台自身的运动精度实现精确定位,不能实时反馈微动台实时位移与姿态信息,并且无法在运动过程中进行反馈调节。发明人考虑引入测量反射镜作为测量基准,通过实时反馈微动台的位移信息实现精确定位,然而,由于微位移工作台与测量反射镜为不同材料,在环境温度发生变化时,二者间不同的热膨胀系数导致的热变形对测量精度产生较大影响。
技术实现要素:
4.基于背景技术存在的技术问题,本发明提出了一种可释放热变形的高精度六自由度微位移工作台系统,以期望满足微动台的驱动控制系统与三坐标测量机测量系统的统一,本发明设计了三维靶镜结构,三坐标测量机的激光干涉测量系统通过三维靶镜实时反馈微动台的运动信息,并通过控制系统进行实时补偿。并通过设计一种热膨胀释放机构来有效减小温度变化时,不同材料间的热膨胀变形量的差异对微位移工作台精度造成的影响。
5.本发明为达到上述发明目的,采用如下技术方案:
6.一种可释放热变形的高精度六自由度微位移工作台系统,其特征在于,包括底座、支撑层、转动层、平动层、三维靶镜、载物台以及连接机构;所述支撑层、转动层、平动层实现空间中的六自由度运动并通过连接机构将六自由度位移传递到三维靶镜、载物台上;
7.所述底座上垂直固定有多个支撑层,多个所述支撑层上共同支撑连接所述转动层,所述转动层上连接所述平动层,所述平动层上通过连接机构与所述三维靶镜的z面连接,所述载物台置于所述三维靶镜的z面上;
8.所述平动层包括平动自由度板,所述平动自由度板上开设有两个第一通槽,所述平动自由度板的上端面上位于两个第一通槽之间开设有下锥形槽;
9.所述连接机构包括连接件、连接螺杆、拉伸弹簧、钢球,所述连接螺杆的一端与所述连接件固定连接、另一端与所述三维靶镜的z面连接,所述连接件上开设有两个第二通
槽,所述连接件的下端面上位于两个第二通槽之间开设有与所述下锥形槽相同规格的上锥形槽,所述平动自由度板、连接件通过两个贯穿通槽的拉伸弹簧弹性连接,两个所述钢球置于所述下锥形槽、上锥形槽之间。
10.进一步地,所述的一种可释放热变形的高精度六自由度微位移工作台系统,其特征在于,所述平动自由板上沿中心分布有三个下锥型槽,与所述平动层和三维靶镜连接的连接机构的数量也是三个,三个所述连接机构的三个上锥形槽与三个下锥型槽分别相配合使用。
11.进一步地,所述的一种可释放热变形的高精度六自由度微位移工作台系统,其特征在于,所述支撑层提供沿z向平动以及绕x轴、y轴的转动,包括三个呈品字形分布在底座上的z向自由度板,所述z向自由度板的底部垂直固定在所述底座上,所述z向自由度板的中上部挖空并在顶部固定有套筒,所述z向自由度板的挖空结构中置有封装型压电陶瓷,所述封装型压电陶瓷的顶部螺纹连接有预紧块,所述套筒中螺纹连接有细牙螺杆,所述细牙螺杆的旋紧后一端抵在所述预紧块上为所述封装型压电陶瓷提供预紧力;所述套筒上分布有第一螺纹孔,用于与所述转动层连接。
12.进一步地,所述的一种可释放热变形的高精度六自由度微位移工作台系统,其特征在于,所述转动层提供绕z轴正、反向转动的角位移,包括转动自由度板、转动层第一压电陶瓷、转动层第二压电陶瓷、转动层第三压电陶瓷、转动层第四压电陶瓷,所述转动自由度板包括转动内框、转动外框以及直角柔性铰链,所述转动内框上分布有用于与所述支撑层上的第一螺纹孔连接的第一阶梯孔;所述转动内框作为转动层第一压电陶瓷、转动层第二压电陶瓷、转动层第三压电陶瓷、转动层第四压电陶瓷的固定端,所述转动外框作为绕z轴转动的角位移输出端;所述转动层第一压电陶瓷、转动层第三压电陶瓷为一组,工作时为其提供相同的电压信号,可使转动外框产生绕z轴的顺时针转动的角位移,即正向角位移;所述转动层第二压电陶瓷、转动层第四压电陶瓷为一组,工作时为其提供相同的电压信号,可使转动外框产生绕z轴的逆时针转动的角位移,即负向角位移;所述转动外框上分布有第二螺纹孔,用于与所述平动层连接。
13.进一步地,所述的一种可释放热变形的高精度六自由度微位移工作台系统,其特征在于,所述平动层提供沿着x轴、y轴平动的位移,包括平动自由度板、平动层第一压电陶瓷、平动层第二压电陶瓷,所述平动自由度板包括平动内框、平动外框以及直角柔性铰链,所述平动外框上分布有用于与所述转动层上的第二螺纹孔连接的第二阶梯孔;所述平动外框作为平动层第一压电陶瓷、平动层第二压电陶瓷的固定端,所述平动内框作为沿x轴、y轴平动的位移输出端;所述平动层第一压电陶瓷提供沿y轴正向平动的位移,所述平动层第二压电陶瓷提供沿x轴正向平动的位移。
14.进一步地,所述的一种可释放热变形的高精度六自由度微位移工作台系统,其特征在于,所述转动内框的中部设有转动层凸台,所述平动内框的中部设有平动层凸台。
15.进一步地,所述的一种可释放热变形的高精度六自由度微位移工作台系统,其特征在于,所述平动层上的第一通槽和下锥形槽均分布在所述平动内框上。
16.进一步地,所述的一种可释放热变形的高精度六自由度微位移工作台系统,其特征在于,所述三维靶镜包括三个高精度反射镜x面、y面、z面,三个反射镜通过真空吸附的方式组成两两正交的三维靶镜。
17.进一步地,所述的一种可释放热变形的高精度六自由度微位移工作台系统,其特征在于,所述连接螺杆的一端贯穿所述三维靶镜的z面并通过圆螺母和垫片紧固。
18.进一步地,所述的一种可释放热变形的高精度六自由度微位移工作台系统,其特征在于,所述连接件和平动自由度板上分别开设有椭圆形槽,所述椭圆形槽中分别横向插入第一支撑柱、第二支撑柱,所述第一支撑柱、第二支撑柱分别固定所述拉伸弹簧的两端。
19.本发明所设计的可释放热膨胀变形的六自由度微位移工作台,在结构上采用串并联结合的方式来实现在空间中的六自由度运动。支撑层由三个z向自由度板呈品字型合理分布在微动台底部,通过封装型压电陶瓷进行位移驱动,实现沿z向平动以及绕x轴、y轴的转动;动层由平动自由度板以及两个垂直布置的压电陶瓷组成,通过两个方向的压电陶瓷进行位移驱动来实现沿x轴、y轴的平动;转动层由转动自由度板以及四个压电陶瓷组成,四个压电陶瓷两两对称布置来实现绕z轴的正向以及负向转动。支撑层、平动层以及转动层之间通过内六角螺钉连接来实现位移传递。
20.六个自由度的位移由支撑层、平动层以及转动层最终通过连接机构传递到载物台和三维靶镜上。三维靶镜即为测量反射镜,三维靶镜与载物台同时作为微动台系统的位移输出端,激光干涉测量系统发出三束相互正交的测量光束打到三维靶镜上,反射回的测量激光束将靶镜的位移信息反馈到测量系统,并通过微动台的驱动控制系统对微动台的进行精密定位和姿态补偿。转动层的转动自由度板上沿中心均匀分布着三个锥形槽,对应的连接件底部具有相同规格的锥形槽,两槽之间放置两个m6的钢球,同时使用拉伸弹簧和支撑杆连接转动自由度板与载物台、三维靶镜。这种“槽球配对”的结构同时具有传递位移和释放不同材料之间的热膨胀变形的作用。
21.本发明的优点是:
22.本发明通过设计“三维靶镜”结构,结合激光干涉测量系统实时反馈微动台的位移信息,并利用微动台的驱动控制系统对微动台在运动过程中的姿态进行调整,使得工件更加精确的到达指定位置。
23.本发明通过设计“槽球配对”的热膨胀释放机构,有效减小温度变化时,不同材料间的热膨胀变形量的差异对微位移工作台精度造成的影响。
附图说明
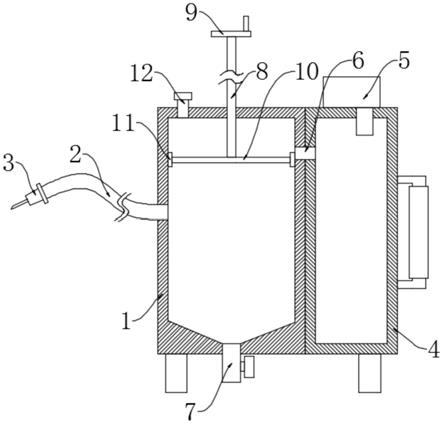
24.图1为本发明微动台的总体结构图;
25.图2为本发明微动台的支撑层机构示意图;
26.图3为本发明微动台的转动层结构示意图;
27.图4为本发明微动台的平动层结构示意图;
28.图5为本发明微动台的三维靶镜结构示意图;
29.图6为本发明微动台热膨胀释放机构示意图;
30.图7为本发明微动台热膨胀释放原理图。
31.图中标号:底座1、支撑层2、转动层3、平动层4、三维靶镜5、载物台6;
32.z向自由度板7、封装型压电陶瓷8、预紧块9、套筒10、细牙螺杆11、第一螺纹孔12;
33.第二螺纹孔13、转动层第一压电陶瓷14、转动层第二压电陶瓷15、直角柔性铰链16、转动自由度板17、转动外框18、转动层第三压电陶瓷19、转动层第四压电陶瓷20、第一阶
梯孔21、转动内框22;
34.第一通槽23、下锥形槽24、直角柔性铰链25、平动自由度板26、平动外框27、平动层第一压电陶瓷28、平动内框29、平动层第二压电陶瓷30、第二阶梯孔31;
35.z面32、y面33、x面34;
36.上锥形槽37、连接螺杆39、垫片40、圆螺母41、钢球43、第一支撑柱44、拉伸弹簧45、第二支撑柱46、连接件47;
37.转动层凸台50、平动层凸台51。
具体实施方式
38.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
39.实施例1。
40.如图1所示,一种可释放热变形的高精度六自由度微位移工作台系统,包括底座1、支撑层2、转动层3、平动层4、三维靶镜5、载物台6以及连接机构;支撑层2、转动层3、平动层4实现空间中的六自由度运动并通过连接机构将六自由度位移传递到三维靶镜5、载物台6上;
41.底座1上垂直固定有三个支撑层2,三个支撑层2上共同支撑连接转动层3,转动层3上连接平动层4,平动层4上通过连接机构与三维靶镜5的z面32连接,载物台6置于三维靶镜5的z面32上;
42.如图4所述,平动层4包括平动自由度板26,平动自由度板26上开设有两个第一通槽23,平动自由度板26的上端面上位于两个第一通槽23之间开设有下锥形槽24;
43.如图6所示,连接机构包括连接件47、连接螺杆39、拉伸弹簧45、钢球43,连接螺杆39的一端与连接件47固定连接、另一端与三维靶镜5的z面32连接,连接件47上开设有两个第二通槽48,连接件47的下端面上位于两个第二通槽48之间开设有与下锥形槽24相同规格的上锥形槽37,平动自由度板26、连接件通过两个贯穿通槽的拉伸弹簧45弹性连接,两个钢球43置于下锥形槽24、上锥形槽37之间。
44.如图4所述,平动自由板26上沿中心分布有三个下锥型槽24,与平动层4和三维靶镜5连接的连接机构的数量也是三个,三个连接机构的三个上锥形槽37与三个下锥型槽24分别相配合使用。
45.如图2所述,支撑层2提供沿z向平动以及绕x轴、y轴的转动,包括三个呈品字形分布在底座1上的z向自由度板7,z向自由度板7的底部垂直固定在底座1上,z向自由度板7的中上部挖空并在顶部固定有套筒10,z向自由度板7的挖空结构中置有封装型压电陶瓷8,封装型压电陶瓷8的顶部螺纹连接有预紧块9,套筒10中螺纹连接有细牙螺杆11,细牙螺杆11的旋紧后一端抵在预紧块9上为封装型压电陶瓷8提供预紧力;套筒10上分布有第一螺纹孔12,用于与转动层3连接。封装型压电陶瓷8产生的位移可以通过第一螺纹孔12构成的螺纹连接结构将位移传递到转动层3上。
46.如图3所述,转动层3提供绕z轴正、反向转动的角位移,包括转动自由度板17、转动层第一压电陶瓷14、转动层第二压电陶瓷15、转动层第三压电陶瓷19、转动层第四压电陶瓷20,转动自由度板17包括转动内框22、转动外框18以及直角柔性铰链16,转动内框22上分布
有用于与支撑层2上的第一螺纹孔12连接的第一阶梯孔21;转动内框22作为转动层第一压电陶瓷14、转动层第二压电陶瓷15、转动层第三压电陶瓷19、转动层第四压电陶瓷20的固定端,转动外框18作为绕z轴转动的角位移输出端;转动层第一压电陶瓷14、转动层第三压电陶瓷19为一组,工作时为其提供相同的电压信号,可使转动外框18产生绕z轴的顺时针转动的角位移,即正向角位移;转动层第二压电陶瓷15、转动层第四压电陶瓷20为一组,工作时为其提供相同的电压信号,可使转动外框18产生绕z轴的逆时针转动的角位移,即负向角位移;转动外框18上分布有第二螺纹孔13,用于与平动层4连接。转动层3产生的绕z轴转动的角位移以及支撑层2传递来的沿z轴平动位移、绕x轴、y轴转动的角位移通过第二螺纹孔13构成的螺纹连接结构传递到平动层4上。
47.如图4所述,平动层4提供沿着x轴、y轴平动的位移,包括平动自由度板26、平动层第一压电陶瓷28、平动层第二压电陶瓷30,平动自由度板26包括平动内框29、平动外框27以及直角柔性铰链25,平动外框27上分布有用于与转动层3上的第二螺纹孔13连接的第二阶梯孔31;平动外框27作为平动层第一压电陶瓷28、平动层第二压电陶瓷30的固定端,平动内框29作为沿x轴、y轴平动的位移输出端;平动层第一压电陶瓷28提供沿y轴正向平动的位移,平动层第二压电陶瓷30提供沿x轴正向平动的位移。平动层4产生的位移以及传递来的位移通过由下锥形槽24、第一通槽23、连接件47、连接螺杆39、拉伸弹簧45以及支撑柱组成的连接机构传递到三维靶镜5以及载物台6上。
48.转动内框22的中部设有转动层凸台50,平动内框29的中部设有平动层凸台51。转动层3上的凸台50与平动层4上的凸台51可提高压电陶瓷驱动器安装端的刚度,减小转动外框18与平动外框27在压电陶瓷安装处的变形,进而减小位移损失的比例,提高微动台的位移输出。
49.平动层4上的第一通槽23和下锥形槽24均分布在平动内框29上。
50.如图5所述,三维靶镜5包括三个高精度反射镜x面34、y面33、z面32,三个反射镜通过真空吸附的方式组成两两正交的三维靶镜5。微动台整体六自由度的位移最终传递到载物台6以及三维靶镜5上。微动台在工作时,会有三束两两正交的激光束打到三维靶镜5上,而反射回来的激光束会反馈三维靶镜5的六个自由度的位移信息,达到实时检测位移信息的目的,并通过微动台的驱动控制系统对微动台的进行精密定位和姿态补偿。
51.连接螺杆39的一端贯穿三维靶镜5的z面32并通过圆螺母41和垫片40紧固。
52.连接件47和平动自由度板26上分别开设有椭圆形槽,椭圆形槽中分别横向插入第一支撑柱44、第二支撑柱46,第一支撑柱44、第二支撑柱46分别固定拉伸弹簧45的两端。
53.如图6、7所述,三维靶镜5材料为微晶玻璃,在常温时其热膨胀系数可视为零,微动台运动部件平动自由度板26材料为钛铝合金,具有较大的热膨胀系数。设计了如图6所示的连接机构来释放温度变化时平动自由度板26产生的热膨胀变形。连接螺栓39通过圆螺母41以及垫片40与反射镜z面32连接固定。平动自由度板26与来连接件47通过拉伸弹簧45连接。支撑柱46放置在平动自由度板26下面的椭圆形槽中,支撑柱44放置在连接件47下方的椭圆形槽中。拉伸弹簧45在两个支撑柱44、46的作用下产生一定的拉力,两侧拉伸弹簧同时作用可将连接件47与平动自由度板26连接固定。连接件47下方开有上锥形槽37,平动自由度板26上方开有相同规格的下锥形槽24,两个锥形槽内直接放置有两个m6的钢球43,钢球43受到下、上锥形槽24与37的钳位作用,只能沿着锥形槽的方向移动。平动自由板26上沿中心分
布有三个下锥形槽24,在温度发生变化时,多自由度板产生热膨胀变形,钢球43沿锥形槽运动,热膨胀变形可沿着三个下锥形槽均匀释放。
54.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。