1.本实用新型涉及机械零部件焊接技术领域,具体为一种机械零部件焊接用智能工装夹具。
背景技术:
2.焊接,也称作熔接,是一种以加热、高温或者高压的方式接合金属或其他热塑性材料如塑料的制造工艺及技术。现代焊接的能量来源有很多种,包括气体焰、电弧、激光、电子束、摩擦和超声波等。除了在工厂中使用外,焊接还可以在多种环境下进行,如野外、水下和太空。无论在何处,焊接都可能给操作者带来危险,所以在进行焊接时必须采取适当的防护措施。焊接给人体可能造成的伤害包括烧伤、触电、视力损害、吸入有毒气体、紫外线照射过度等。
3.现有的焊接工艺大多需要工人手动将需要焊接的零部件对齐,工人手部容易疲劳,容易影响焊接操作的进行。
技术实现要素:
4.本部分的目的在于概述本实用新型的实施方式的一些方面以及简要介绍一些较佳实施方式。在本部分以及本技术的说明书摘要和实用新型名称中可能会做些简化或省略以避免使本部分、说明书摘要和实用新型名称的目的模糊,而这种简化或省略不能用于限制本实用新型的范围。
5.鉴于上述和/或现有一种机械零部件焊接用智能工装夹具中存在的问题,提出了本实用新型。
6.因此,本实用新型的目的是提供一种机械零部件焊接用智能工装夹具,能够通过在壳体顶部安装侧壁和顶板,侧板侧壁开设滑动槽,侧板中间设置有升降块,升降块两侧的滑块伸入滑动槽内部,通过电机带动螺纹杆在滑动槽内部转动,螺纹杆贯穿滑块,滑块通过丝杆结构带动升降块上下移动,完成垂直方向的移动,通过在升降块侧壁安装电机,侧壁开设滑槽,通过电机带动螺纹杆在滑槽内部旋转,滑条利用丝杆结构带动移动板左右移动,完成水平方向的移动,带动夹板和零部件进行多角度移动,能够通过机械化代替工人手动操作,提高焊接操作的精细度。
7.为解决上述技术问题,根据本实用新型的一个方面,本实用新型提供了如下技术方案:
8.一种机械零部件焊接用智能工装夹具,其包括:
9.底板;
10.第一移动组件,包括安装在所述底板顶部的侧板、开设在所述侧板侧壁的滑动槽、安装在所述侧板顶部的顶板、安装在所述顶板顶部的第一电机、安装在所述第一电机输出端并贯穿所述顶板和侧板伸入所述滑动槽内部的第一螺纹杆、安装在所述侧板中间的升降块、开设在所述升降块侧壁的滑槽、安装在所述升降块侧壁的滑块和开设在所述滑块顶部
的第一螺纹孔,所述滑块位于所述滑动槽内部,所述第一螺纹杆贯穿所述第一螺纹孔;
11.第二移动组件,包括安装在所述升降块侧壁的第二电机、安装在所述第二电机输出端并位于所述滑槽内部的第二螺纹杆、位于所述滑槽内部的滑条、开设在所述滑条侧壁的第二螺纹孔和安装在所述滑条另一侧壁的移动板,所述第二螺纹孔与所述第二螺纹杆直径一致,所述第二螺纹杆伸入所述第二螺纹孔内部并与所述第二螺纹孔转动连接;
12.夹持组件,包括安装在所述移动板侧壁的转板和安装在所述转板侧壁的夹板。
13.作为本实用新型所述的一种机械零部件焊接用智能工装夹具的一种优选方案,其中,所述底板侧壁安装有固定板,所述固定板侧壁顶部开设有限位螺纹孔。
14.作为本实用新型所述的一种机械零部件焊接用智能工装夹具的一种优选方案,其中,还包括限位螺纹杆,所述限位螺纹杆直径与所述限位螺纹孔直径一致。
15.作为本实用新型所述的一种机械零部件焊接用智能工装夹具的一种优选方案,其中,所述夹持组件还包括安装在所述移动板侧壁的第三电机、安装在所述第三电机输出端的转杆、开设在所述转板侧壁的第二滑动槽、安装在所述转板侧壁的第四电机、安装在所述第四电机输出端并伸出所述第二滑动槽内部的第三螺纹杆。
16.作为本实用新型所述的一种机械零部件焊接用智能工装夹具的一种优选方案,其中,所述夹板位于所述第二滑动槽内部,所述夹板侧壁开设有第三螺纹孔,所述第三螺纹孔直径与所述第三螺纹杆直径一致,所述第三螺纹杆贯穿所述第三螺纹孔并与所述第三螺纹孔转动连接,所述第三螺纹孔螺纹相反设置。
17.作为本实用新型所述的一种机械零部件焊接用智能工装夹具的一种优选方案,其中,所述夹板侧壁安装有防滑垫,所述防滑垫为橡胶材质。
18.与现有技术相比:能够通过在壳体顶部安装侧壁和顶板,侧板侧壁开设滑动槽,侧板中间设置有升降块,升降块两侧的滑块伸入滑动槽内部,通过电机带动螺纹杆在滑动槽内部转动,螺纹杆贯穿滑块,滑块通过丝杆结构带动升降块上下移动,完成垂直方向的移动,通过在升降块侧壁安装电机,侧壁开设滑槽,通过电机带动螺纹杆在滑槽内部旋转,滑条利用丝杆结构带动移动板左右移动,完成水平方向的移动,带动夹板和零部件进行多角度移动,能够通过机械化代替工人手动操作,提高焊接操作的精细度。
附图说明
19.为了更清楚地说明本实用新型实施方式的技术方案,下面将将结合附图和详细实施方式对本实用新型进行详细说明,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其它的附图。其中:
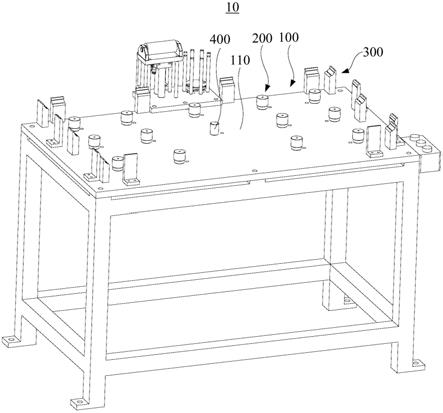
20.图1为本实用新型一种机械零部件焊接用智能工装夹具整体结构图;
21.图2为本实用新型一种机械零部件焊接用智能工装夹具部分结构图a;
22.图3为本实用新型一种机械零部件焊接用智能工装夹具部分结构图b;
23.图4为本实用新型一种机械零部件焊接用智能工装夹具部分结构图c。
具体实施方式
24.为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合附图对本
实用新型的具体实施方式做详细的说明。
25.其次,本实用新型结合示意图进行详细描述,在详述本实用新型实施方式时,为便于说明,表示器件结构的剖面图会不依一般比例作局部放大,而且所述示意图只是示例,其在此不应限制本实用新型保护的范围。此外,在实际制作中应包含长度、宽度及深度的三维空间尺寸。
26.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型的实施方式作进一步地详细描述。
27.本实用新型提供一种机械零部件焊接用智能工装夹具,能够通过在壳体顶部安装侧壁和顶板,侧板侧壁开设滑动槽,侧板中间设置有升降块,升降块两侧的滑块伸入滑动槽内部,通过电机带动螺纹杆在滑动槽内部转动,螺纹杆贯穿滑块,滑块通过丝杆结构带动升降块上下移动,完成垂直方向的移动,通过在升降块侧壁安装电机,侧壁开设滑槽,通过电机带动螺纹杆在滑槽内部旋转,滑条利用丝杆结构带动移动板左右移动,完成水平方向的移动,带动夹板和零部件进行多角度移动,能够通过机械化代替工人手动操作,提高焊接操作的精细度。
28.图1-4示出的是本实用新型一种机械零部件焊接用智能工装夹具实施方式的第一种结构示意图,请参阅图1-图4,本实施方式的一种机械零部件焊接用智能工装夹具包括底板100、第一移动组件200、第二移动组件300和夹持组件400。
29.第一移动组件200包括安装在底板100顶部的侧板210、开设在侧板210 侧壁的滑动槽211、安装在侧板210顶部的顶板220、安装在顶板220顶部的第一电机230、安装在第一电机230输出端并贯穿顶板220和侧板210伸入滑动槽211内部的第一螺纹杆240、安装在侧板210中间的升降块250、开设在升降块250侧壁的滑槽251、安装在升降块250侧壁的滑块260和开设在滑块 260顶部的第一螺纹孔261,滑块260位于滑动槽211内部,第一螺纹杆240 贯穿第一螺纹孔261。
30.第二移动组件300包括安装在升降块250侧壁的第二电机310、安装在第二电机310输出端并位于滑槽251内部的第二螺纹杆320、位于滑槽251内部的滑条330、开设在滑条330侧壁的第二螺纹孔331和安装在滑条330另一侧壁的移动板340,第二螺纹孔331与第二螺纹杆320直径一致,第二螺纹杆320伸入第二螺纹孔331内部并与第二螺纹孔331转动连接。
31.夹持组件400包括安装在移动板340侧壁的转板430和安装在转板430 侧壁的夹板460,通过转板430和夹板460对机械部件进行夹持。
32.结合图1-图4,本实施方式的一种机械零部件焊接用智能工装夹具,通过使用时将需要焊接的零部件嵌入夹板460中间,夹板460对零部件进行夹持,启动第一电机230带动第一螺纹杆240转动,第一螺纹孔261与第一螺纹杆240转动连接,利用丝杆结构,滑块260带动升降块250在第一螺纹杆 240杆身上下移动,完成零部件垂直方向的移动,启动第二电机310带动第二螺纹杆320旋转,第二螺纹孔331与第二螺纹杆320转动连接,利用丝杆结构带动滑条330在第二螺纹杆320杆身前后移动,完成零部件水平方向的移动,通过机械代替工人完成焊接操作,避免焊接过程中工人手部疲劳导致的焊接失误,同时也能提高焊接时的精密度。
33.图1-4示出的是本实用新型一种机械零部件焊接用智能工装夹具实施方式的第二种结构示意图,请参阅图1-图4,与上述实施方式不同的是,本实施方式的一种机械零部件
焊接用智能工装夹具包括限位螺纹杆500。
34.底板100侧壁安装有固定板110,固定板110侧壁顶部开设有限位螺纹孔 120,限位螺纹杆500直径与限位螺纹孔120直径一致,通过限位螺纹杆500 贯穿限位螺纹孔120将底板100固定在平面上。
35.夹持组件400还包括安装在移动板340侧壁的第三电机410、安装在第三电机410输出端的转杆420、开设在转板430侧壁的第二滑动槽431、安装在转板430侧壁的第四电机440、安装在第四电机440输出端并伸出第二滑动槽 431内部的第三螺纹杆450,夹板460位于第二滑动槽431内部,夹板460侧壁开设有第三螺纹孔461,第三螺纹孔461直径与第三螺纹杆450直径一致,第三螺纹杆450贯穿第三螺纹孔461并与第三螺纹孔461转动连接,第三螺纹孔461螺纹相反设置,夹板460侧壁安装有防滑垫470,防滑垫470为橡胶材质,用于保护机械零部件,防止夹板460对零部件造成刮伤。
36.结合图1-图4,本实施方式的一种机械零部件焊接用智能工装夹具,通过将底板100放置在平面顶部,通过限位螺纹杆500贯穿限位螺纹孔120并伸入平面内部,将底板100固定在平面顶部,提高焊接操作时的牢固性,同时通过第四电机440带动第三螺纹杆450旋转,第三螺纹孔461与第三螺纹杆450转动连接,通过丝杆结构带动夹板460在第三螺纹杆450杆身水平移动,因为第三螺纹孔461内部螺纹反向设置,当第三螺纹杆450旋转时,夹板460相互靠近,能够对不同型号不同尺寸的零部件进行夹紧,通过启动第三电机410带动转杆420旋转,转板430随转杆420进行旋转,能够在焊接过程中进行旋转操作,提高焊接时的精密程度。
37.虽然在上文中已经参考实施方式对本实用新型进行了描述,然而在不脱离本实用新型的范围的情况下,可以对其进行各种改进并且可以用等效物替换其中的部件。尤其是,只要不存在结构冲突,本实用新型所披露的实施方式中的各项特征均可通过任意方式相互结合起来使用,在本说明书中未对这些组合的情况进行穷举性的描述仅仅是出于省略篇幅和节约资源的考虑。因此,本实用新型并不局限于文中公开的特定实施方式,而是包括落入权利要求的范围内的所有技术方案。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。