1.本发明涉及一种散热片自动组装线。
背景技术:
2.散热片是一种给电器中的易发热电子元件散热的装置,多由铝合金,黄铜或青铜做成板状,片状,多片状等,如电脑中cpu中央处理器要使用相当大的散热片,电视机中电源管,行管,功放器中的功放管都要使用散热片。一般散热片在使用中要在电子元件与散热片接触面涂上一层导热硅脂,使元器件发出的热量更有效地传导到散热片上,再经散热片散发到周围空气中去。现有散热片的组装,多数为人工方式,少数采用机械设备;相对来说机械设备的组装效率高于人工。
3.在申请号为“cn201910843636.5公开了一种散热片组装装置,其特征在于,包括:一基座,用以承载一载盘;一移动平台,设置于该基座;一下压机具,设置于该移动平台,该下压机具具有一第一针脚及一第二针脚,该第一针脚及该第二针脚用于将一散热片压抵于该载盘;一第一致动器,设置于该下压机具且连接于该第一针脚及该第二针脚,该第一致动器用以致动该第一针脚及该第二针脚环绕一轴心线移动;......。”又如申请号为“cn201820871516.7一种散热片组装工装,其特征在于,包括:基座(1);安装在所述基座(1)上的、用于将散热基体(51)以及电子元件(4)以组合体形态进行定位的定位组件(2),所述散热基体(51)设置有待包覆部(511);安装在所述基座(1)上的、用于对弹性压板(52)进行定位或释放、并施加作用力以使所述弹性压板(52)发生弹性形变至其包覆部(522)准备对所述待包覆部(511)进行包覆、或在所述弹性压板(52)通过所述包覆部(522)与所述待包覆部(511)的配合完成与所述散热基体(51)之间的装配时撤销所述作用力的施力组件(3),......。”又如申请号为“cn201920822735.01.公开的一种散热片组装机,其特征在于,包括工作台(1)以及安装在所述工作台(1)上的转盘(2),所述转盘(2)设有治具,所述治具设有所述散热片,环绕所述转盘(2)并沿所述转盘(2)的运动方向依次设有散热片上料机构(3)、晶体上料机构(4)、锁螺丝机构(5)以及成品下料机构(6),.......。”上述申请方案的提出,极大的提高了散热片在部分领域的组装效率;然而也具有较大的局限性,对组装散热片的产品及实施环境要求较高,只能对一些平面区域、单一位置、简单的产品进行散热片的组装;如:装好电子器件的电源板;同时智能化程度较低,不能根据产品及散热片的组装位置或形态进行状态的调整,适用范围窄;同时功能较为单一,只能进行散热片的固定操作,简单的螺钉固定,对于散热片在安装前进行导热硅脂涂抹或导热垫片的粘贴等需要通过人工的方式进行;同时现有的设备一次只能进行一种散热片的安装,多个不同散热片的安装需要多道工序才能完成,使得生产过程较为繁琐;因此现有的设备已经不能满足现有的需要;急需研发一款新型的散热片组装设备来解决目前所遇到的问题。
技术实现要素:
4.本发明要解决的技术问题是提供一种使用方便,操作简单,智能化程度高,能对电
源板上的器件进行打胶,自动对胶进行固化,同时一次能完成多块不同型号散热片在电源板上的组装,组装过程中自动校准位置、自动进行导热垫片粘贴、自动进行螺丝旋紧等操作,散热片安装完成后还可以对电源板进行分切操作;整个过程一次完成,大大提高了生产效率,具有实用性和使用广泛性的散热片自动组装线。
5.为解决上述问题,本发明采用如下技术方案:
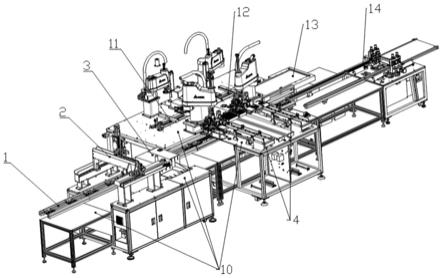
6.一种散热片自动组装线,包括输送线、点胶机构、固化机构、散热片上料机构、抓取机构、锁螺丝机构、电源板夹具、分板机构、导热垫片上料机构、机架和控制系统,输送线贯穿整个组装线,电源板放置在输送线上,所述点胶机构用于对电源板上的电子器件进行涂胶,固化机构用于对涂胶进行固化,散热片上料机构用于完成对不同散热片的上料操作,抓取机构用于抓取移动散热片和电源板,锁螺丝机构用于将散热片固定在电源板上,电源板夹具用于散热片进行安装时的电源板固定,分板机构用于将电源板两侧多余部分切除,导热垫片上料机构用于完成导热垫片的上料操作,控制系统用于维持整个组装线的运转,电源板依次通过点胶机构、固化机构、抓取机构、锁螺丝机构和分板机构的作用完成散热片的安装及电源板两侧多余部分的分切。
7.优选的,所述点胶机构包括四轴涂胶机和胶桶,所述四轴涂胶机包括旋转胶阀和三轴行走机构,三轴行走机构上安装有旋转电机,旋转电机的下端固定有旋转轴,旋转胶阀固定在旋转轴上,所述旋转胶阀的下端安装有针头。
8.该设置,实现了对电源板上不同电子器件的旋转涂胶操作,涂胶无死角,保证了产品质量。
9.优选的,所述抓取机构包括四轴抓取机器人一、四轴抓取机器人二,四轴抓取机器人一、四轴抓取机器人二都包括有四轴机械手、安装在四轴机械手上的散热片夹爪一、电源板夹爪和散热片夹爪二,所述散热片夹爪一包括定位块一、夹片一和夹爪气缸一,所述电源板夹爪包括升降气缸、真空吸盘、吸盘螺杆和限位安装片,所述散热片夹爪二包括夹爪气缸二、夹片二和定位块二。
10.该设置,通过夹取机构定位作用将电源板及散热片放置在固定位置完整组装,实现了多个不同规格大小散热器在电源板上的组装,实现了组装的自动化和智能化,提高了生产效率。
11.优选的,所述锁螺丝机构包括螺丝机一、螺丝机二,螺丝机一、螺丝机二都包括电锁和三轴机械臂,电锁固定在三轴机械臂上,所述螺丝机一、螺丝机二的一侧都匹配有供料器。
12.该设置,实现了电源板与散热片组装时螺丝的自动上料、拿取、旋转固定,实现了自动化。
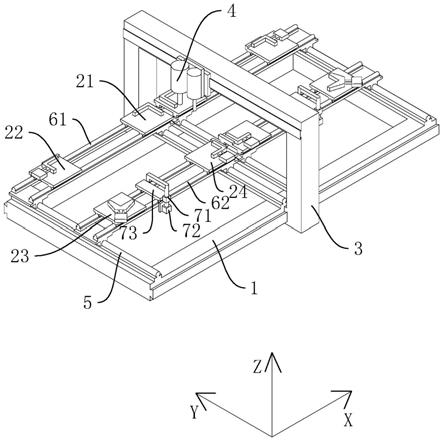
13.优选的,所述电源板夹具包括电源板夹具一、电源板夹具二,电源板夹具一、电源板夹具二都包括伺服电机一、滑动安装座和固定安装座,滑动安装座与固定安装座的相对一侧都设有尼龙垫板,所述固定安装座的一侧设有压紧气缸,压紧气缸上安装有夹块。
14.该设置,实现了电源板的夹紧、固定,防止电源板移动,从而便于散热片组装在电源板上,增加了组装时的稳定性。
15.优选的,所述散热片上料机构包括护板、输送机构和挡条,所述散热片上料机构的一端设有散热片定位机构,散热片定位机构包括推板、推杆气缸一、推杆气缸二和散热片放
置台。
16.该设置,实现了散热片的自动上料,同时完成对散热片的定位及固定,方便散热片夹爪一拿取散热片进行组装。
17.优选的,所述导热垫片上料机构包括吸盘夹具、密封垫片和无杆气缸组件,导热垫片放置在吸盘夹具的上端,所述吸盘夹具上设有通孔。
18.该设置,通过吸盘夹具吸力的作用完成导热垫片的固定,同时也便于抓取机构从导热垫片上料机构上拿取导热垫片。
19.优选的,所述分板机构包括移动支座、固定支座和滑板,移动支座固定滑板上,固定支座固定在机架上,移动支座、固定支座上安装有刀片和伺服电机二,所述刀片包括上刀片和下刀片,伺服电机二带动下刀片转动,所述分板机构的中间设有除尘腔,除尘腔的底部连接有吸尘器。
20.该设置,便于通过切刀的作用将电源板两侧多余且不需要的部分进行切除,通过切除过程中产生的粉末通过吸尘器进行收集,防止粉尘排放,从而有利于环保。
21.优选的,所述抓取机构、锁螺丝机构上都安装有视觉模块,视觉模块为摄像机。
22.该设置,便于通过摄像机的作用扫描并记录螺丝孔的位置,从而便于散热片的放置及后续螺丝对散热片的固定,保证电源板及散热器上的螺丝孔在一条直线上,保证安装时的准确性。
23.本发明的有益效果是:使用方便,操作简单,智能化程度高,能对电源板上的器件进行打胶,自动对胶进行固化,同时一次能完成多块不同型号散热片在电源板上的组装,组装过程中自动校准位置、自动进行导热垫片粘贴、自动进行螺丝旋紧等操作,散热片安装完成后还可以对电源板进行分切操作;整个过程一次完成,大大提高了生产效率,具有实用性和使用的广泛性。
附图说明
24.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,但并不是对本发明保护范围的限制。
25.图1为本发明的内部结构示意图;
26.图2为本发明的散热片定位结构安装位置示意图;
27.图3为本发明的点胶机构结构示意图;
28.图4为本发明的四轴抓取机器人结构示意图;
29.图5为本发明的散热片夹爪一结构示意图;
30.图6为本发明的电源板夹爪结构示意图;
31.图7为本发明的散热片夹爪二结构示意图;
32.图8为本发明的分板机构结构示意图;
33.图9为本发明的电源板夹具结构示意图;
34.图10为本发明的导热垫片上料机构结构示意图;
35.图11为本发明的散热片上料机构结构示意图;
36.图12为本发明的推板结构示意图;
37.图13为本发明的外部结构示意图;
38.其中,1.输送线,2.点胶机构,3.固化机构,4.散热片上料机构,5.供料器,6.四轴抓取机器人一,7.四轴抓取机器人二,8.螺丝机一,9.螺丝机二,10.机架,11.电源板夹具一,12.电源板夹具二,13.废品处理线,14.分板机构,15.导热垫片上料机构,16.旋转胶阀,17.三轴行走机构,18.吸盘夹具,19.密封垫片,20.无杆气缸组件,21.四轴机械手,22.散热片夹爪一,23.电源板夹爪,24.散热片夹爪二,25.视觉模块,26.定位块一,27.夹片一,28.夹爪气缸一,29.升降气缸,30.真空吸盘,31.吸盘螺杆,32.限位安装片,33.夹爪气缸二,34.夹片二,35.定位块二,36.伺服电机一,37.滑动安装座,38.尼龙垫板,39.固定安装座,40.夹块,41.压紧气缸,42.电锁,43.三轴机械臂,44.移动支座,45.固定支座,46.上刀片,47.下刀片,48.托板,49.伺服电机二,50.滑板,51.除尘腔,52.护板,53.输送机构,54.挡条,55.推板,56.推杆气缸一,57.推杆气缸二,58.散热片放置台,59.旋转电机。
具体实施方式
39.参阅图1至图13所示的一种散热片自动组装线,包括输送线1、点胶机构2、固化机构3、散热片上料机构4、抓取机构、锁螺丝机构、电源板夹具、分板机构14、导热垫片上料机构15、机架10和控制系统,输送线1贯穿整个组装线,电源板放置在输送线1上,输送线1、点胶机构2、固化机构3、散热片上料机构4、抓取机构、锁螺丝机构、电源板夹具、分板机构14、导热垫片上料机构15都安装在机架10上,机架10的外侧设有防护罩,所述点胶机构2用于对电源板上的电子器件进行涂胶,固化机构3用于对涂胶进行固化,散热片上料机构4用于完成对不同散热片的上料操作,抓取机构用于抓取移动散热片和电源板,锁螺丝机构用于将散热片固定在电源板上,电源板夹具用于散热片进行安装时的电源板固定,分板机构14用于将电源板两侧多余部分切除,导热垫片上料机构15用于完成导热垫片的上料操作,控制系统用于维持整个组装线的运转,电源板依次通过点胶机构、固化机构、抓取机构、锁螺丝机构和分板机构的作用完成散热片的安装及电源板两侧多余部分的分切。
40.进一步,所述点胶机构2包括四轴涂胶机和胶桶(未图示),所述四轴涂胶机包括旋转胶阀16和三轴行走机构17,三轴行走机构17上安装有旋转电机59,旋转电机59的下端固定有旋转轴并带动旋转轴转动,旋转胶阀16固定在旋转轴上,所述旋转胶阀16的下端安装有针头。
41.进一步,所述抓取机构包括四轴抓取机器人一6、四轴抓取机器人二7,四轴抓取机器人一6、四轴抓取机器人二7都包括有四轴机械手21、安装在四轴机械手21上的散热片夹爪一22、电源板夹爪23和散热片夹爪二24,所述散热片夹爪一22包括定位块一26、夹片一27和夹爪气缸一28,定位块一26、夹片一27固定在夹爪气缸一28上;所述电源板夹爪23包括升降气缸29、真空吸盘30、吸盘螺杆31和限位安装片32,升降气缸29上设有滑块,吸盘螺杆31、限位安装片32固定在滑块上,真空吸盘30与吸盘螺杆31固定连接;所述散热片夹爪二24包括夹爪气缸二33、夹片二34和定位块二35,夹片二34、定位块二35固定在夹爪气缸二33上。
42.进一步,所述锁螺丝机构包括螺丝机一8、螺丝机二9,螺丝机一8、螺丝机二9都包括电锁42和三轴机械臂43,电锁42固定在三轴机械臂43上,所述螺丝机一8、螺丝机二9的一侧都匹配有供料器5,供料器5实现螺丝的定位上料,便于螺丝机的。
43.进一步,所述电源板夹具包括电源板夹具一11、电源板夹具二12,电源板夹具一11、电源板夹具二12都包括伺服电机一36、滑动安装座37和固定安装座39,伺服电机一36一
端安装有丝杆,丝杆带动滑动安装座移动,滑动安装座37与固定安装座39的相对一侧都设有尼龙垫板38,所述固定安装座39的一侧设有压紧气缸41,压紧气缸41上安装有夹块40,压紧气缸41带动夹块40转动。
44.进一步,所述散热片上料机构4包括护板52、输送机构53和挡条54,护板52设置在输送机构53的两侧,输送机构由输送带和电机组成,挡条54设置在输送机构的顶端,所述散热片上料机构4的一端设有散热片定位机构,散热片定位机构包括推板55、推杆气缸一56、推杆气缸二57和散热片放置台58,推板55固定在推杆气缸一56上,推杆气缸二57固定在护板52上。
45.进一步,所述导热垫片上料机构15包括吸盘夹具18、密封垫片19和无杆气缸组件20,导热垫片放置在吸盘夹具18的上端,密封垫片19固定在吸盘夹具18的上,所述吸盘夹具为多个,并呈九宫格状排列,所述吸盘夹具18上设有通孔。
46.进一步,所述分板机构14包括移动支座44、固定支座45和滑板50,移动支座44固定滑板50上,固定支座45固定在机架10上,移动支座44、固定支座45上安装有刀片和伺服电机二49,所述刀片包括上刀片46和下刀片47,伺服电机二49带动下刀片47转动,所述分板机构14的中间设有除尘腔51,除尘腔51的底部连接有吸尘器。
47.进一步,所述上刀片46与下刀片47之间设有托板48。
48.进一步,所述抓取机构、锁螺丝机构上都安装有视觉模块25,视觉模块25为摄像机,摄像机匹配有相对应的图片处理系统。
49.进一步,所述固化机构3为uv固化灯,uv固化灯发射紫外线。
50.进一步,所述分板机构14的下端设有滚珠丝杆(未图示)和传动电机(未图示),传动电机通过滚珠丝杆带动滑板移动,从而实现移动支座与固定支座之间距离的变动,从而使得分板机构完成不同大小规格电源板两侧多余部分的切除。
51.进一步,所述四轴抓取机器人7二的一侧设有废品处理线13。
52.本发明点胶机构的涂胶为uv胶。
53.本发明的输送线为链轮传动,传动方式较为常见,估不细述。
54.本发明使用时,将待安装散热片的电源板放置在输送线上,电机驱动链轮转动,链轮及链条带动电源板移动,当设定位置的传感器检测到电源板时,链轮及链条停止移动;然后四轴抓取机器人一工作,当四轴抓取机器人一的四轴机械手达到设定位置时,电源板夹爪的升降气缸推动真空吸盘下移,通过真空吸盘的吸力吸住电源板平面位置,通过四轴机械手的作用将输送线上的电源板移动至电源板夹具一上,此时电源板置于滑动安装座和固定安装座的尼龙垫板上,当电源板夹具一上的传感器检测到电源板时,私服电机一带动滑动安装座向固定安装座靠拢,通过滑动安装座和固定安装座的作用将电源板加紧,随后压紧气缸工作,压紧气缸带动夹块转动并下移,使得夹块将电源板压住;随后四轴抓取机器人一上的视觉模块拍照采集电源板上螺丝孔位置信息并进行记录,采集完成后四轴抓取机器人一的四轴机械手带动散热片夹爪一移动至散热片放置台的上端,然后夹爪气缸一带动夹片一将散热片放置台上的散热片夹取,然后四轴机械手移动带动携带散热片的散热片夹爪一移动至导热垫片上料机构的吸盘夹具上端,随后将散热片压在吸盘夹具上端的导热垫片上(此步骤中,由于导热垫片的安装按照九宫格放置,具有一定的规律性,因此四轴抓取机器人只需按照设定的程序运行即可。),导热垫片粘贴在散热片上,随后四轴机械手带动散
热片夹爪一移动至电源板上端,然后将携带导热垫片的散热片放置在电源板上的散热片安装位置;随后螺丝机一在供料器上取到螺丝,通过三轴机械臂和电锁的作用将第一颗螺丝旋转进入散热片和电源板对应的螺丝孔中(在此操作之前,当四轴抓取机器人一的视觉模块完成对电源板拍照采集后去,再去进行散热片的夹取时,螺丝机一的三轴机械臂带动其视觉模块完成对电源板螺丝孔位置的拍照信息采集。),此时第一颗螺丝的安装根据螺丝机一操作的最佳的位置选定;当第一可螺丝安装完后,散热片夹爪一松开散热片并移走,随后螺丝机一完成散热片与电源板剩下螺丝的安装固定;当螺丝全部安装完成后,螺丝机一复位;随后四轴抓取机器人一的四轴机械手工作,其上的散热片夹爪二将组装好的散热片夹住,随后电源板夹具一上的夹片、滑动安装座依次复位,最后四轴机械手将组装好散热片的电源板放置在输送线上,随后四轴抓取机器人一归位,输送线再次带动电源板移动;当组装完成一个散热片的电源板移动至设定位置时(传感器检测),四轴抓取机器人二工作,通过电源板夹爪的作用将电源板放置在电源板夹具二上,随后四轴抓取机器人二和螺丝机二按照四轴抓取机器人一、螺丝机一重复组装第一块散热片时的步骤或方式完成对第二块散热片的安装;当第二块散热片组装完成后,四轴抓取机器人二的四轴机械手将电源板夹取再次放置在输送线上;电源板沿着输送线移动自分切机构处,根据电源板的到位信号,对电源板进行在线式分切此时分切机构的伺服电机二带动带动下切刀转动,通过两侧切刀的作用将多余的板材切除,然后产品和废料一同下料至输送线上,等待人工分拣;在电源板多余板材的切除过程中,产生的粉尘或粉末进入除尘腔中,通过吸尘器进行处理。
55.本发明在实施的过程中,其组装散热片的电源板两侧都预留有多余的板材,多余的板材是为了便于散热片组装时对电源板进行固定,因此在散热片组装完成以后需要将多余的板材切除,以保证电源板的正常使用。
56.本发明在对电源板上的电子器件进行涂胶操作前,就已经完成对电源板上电子器件位置的采集(电子器件的安装已经在前道工序完成),采集的电源板信息事先输入控制系统中,因此无需再次进行采集;工作的过程中,可以将输送线直接与上道工序的回流线连接即可。
57.本发明的机架采用优质铝型材搭建,结构稳定、外形美观。输送线链条采用优质304不锈钢为材料,防锈美观,不损伤电源板。输送线适应电源板宽度100mm
‑
350mm。
58.本发明的输送线一侧都可以进行移动,通过伺服电机带动滚珠丝杆实现高精度自动调宽(
±
0.02mm),操作简单,尺寸精准。
59.本发明的四轴涂胶机采用在线式四轴涂胶机,包括x、y、z轴以及一个胶头旋转的r轴,涂胶机采用控制卡控制,可根据所需完成点、直线、圆弧、矩形的运行。供料胶桶采用正压式,将胶水从胶桶中挤入旋转胶阀,出胶由胶阀控制,运行参数可修改调节。点胶完成的电源板经过输送线穿过uv固化灯照射区,缓慢输送完成固化,uv固化灯照射面积为400*100mm,uv固化灯外侧设有外壳防护,从而防止紫外光线外漏。
60.本发明的螺丝机具备扭矩设定、检测反馈、时间检测、圈数检测、漏锁浮锁报警等功能。
61.本发明的分板机构可根据接收的控制系统信息信号完成自动调宽。
62.本发明的防护罩上安装有显示窗口及按键区域,可用于操作程序的输入、改变、更新及设备的调整、控制等操作。
63.本发明的供料器由市面采供得到,估不细述。
64.本发明的机架为组装线所有支撑结构的总称,不限于标注所示位置。
65.本发明在进行电源板和散热片安装的时候,当电源板完成第一块散热片安装且准备进行第二块散热片安装的时候,四轴抓取机器人一再次进行下一电源板和散热器的安装操作,实现不间断的组装操作,使得生产效率大大提高。
66.以上,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何不经过创造性劳动想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求书所限定的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。