1.本发明涉及一种自动驾驶车辆。
背景技术:
2.日本未审专利申请公报第2019-127064号(jp 2019-127064 a)公开了一种技术,在该技术中,共乘车辆的乘员座椅由隔板壁隔开。在现有技术中,隔板壁分隔车厢中的空间,使得在前排和后排中的每一排中提供两个私人空间,从而能够确保私密性。
技术实现要素:
3.然而,在上述现有技术的情况下,当将人为驾驶应用于车辆时,设置在车厢中的隔板壁使驾驶变得困难,这是因为隔板壁阻碍驾驶员的视野并且驾驶员因此看不到车辆的周围环境。
4.考虑到上述事实,本发明的目的是提供一种自动驾驶车辆,在该自动驾驶车辆中,能够切换自动驾驶和人为驾驶,在人为驾驶期间不阻碍可视性,并且在自动驾驶期间能够确保私人空间。
5.根据本发明的第一方面的自动驾驶车辆能够在自动驾驶与人为驾驶之间切换,并且该自动驾驶车辆包括隔板设定允许装置,该隔板设定允许装置在自动驾驶期间允许在乘员之间设定视觉隔板。
6.根据本发明的第一方面的自动驾驶车辆能够在自动驾驶与人为驾驶之间切换,并且该自动驾驶车辆包括隔板设定允许装置。隔板设定允许装置被设定成在自动驾驶期间允许在乘员之间设定视觉隔板。即,隔板设定允许装置在人为驾驶期间不运行。
7.换句话说,在本发明中,在通过人为驾驶来操作自动驾驶车辆时,不设定视觉隔板。因此,当通过人为驾驶来操作自动驾驶车辆时,隔板不会阻碍视野。另一方面,当自动驾驶车辆正在自动驾驶时,设置视觉隔板使得能够确保私人空间。
8.在此,“视觉隔板”是指阻碍视野的隔板。因此,例如,玻璃是无色透明的并且简单地分隔空间,尽管该玻璃设置有控光功能,但并不对应于本文中的“视觉隔板”。
9.在根据本发明的第一方面的自动驾驶车辆中,在根据本发明的第二方面的自动驾驶车辆中,隔板是可控光的。
10.在根据本发明的第二方面的自动驾驶车辆中,例如,控光构件(诸如控光玻璃或控光片)被例示为可控光隔板。例如,可以改变控光构件的透明度。当控光构件是透明的时,控光构件不对应于视觉隔板。因此,不能确保私人空间。另一方面,当由于遮光性变高而使透明度降低时,控光构件可以阻碍视野。在这种情况下,可以通过控光构件来确保私人空间。
11.在根据本发明的第一方面或第二方面的自动驾驶车辆中,在根据本发明的第三方面的自动驾驶车辆中,在隔板设定允许装置允许设定隔板之后,能够选择是自动设定隔板还是手动设定隔板。
12.在根据本发明的第三方面的自动驾驶车辆中,在隔板设定允许装置允许设定隔板
之后,能够选择是自动设定隔板还是手动设定隔板,这使得能够根据车辆的自动驾驶期间的乘员的需要来设定隔板。
13.在根据本发明的第一方面至第三方面中的任一方面的自动驾驶车辆中,根据本发明的第四方面的自动驾驶车辆包括容纳部,当隔板设定允许装置不允许设定隔板时,该容纳部容纳隔板。
14.在根据本发明的第四方面的自动驾驶车辆中,提供了容纳隔板的容纳部。当隔板设定允许装置不允许设定隔板时,维持将隔板容纳在容纳部中的状态。即,即使未设定隔板,隔板也不会暴露在车厢中。
15.在根据本发明的第一方面至第四方面中的任一方面的自动驾驶车辆中,在根据本发明的第五方面的自动驾驶车辆中,能够使用车载摄影相机或就座传感器来检测就座在车辆座椅上的乘员的就座位置,并且当乘员至少在车辆宽度方向或车辆前后方向上相互挨着就座时,隔板被设定在相互挨着就座的乘员之间。
16.在根据本发明的第五方面的自动驾驶车辆中,使用车载摄影相机或就座传感器来检测乘员的就座位置。例如,当不存在在车辆宽度方向上并排就座的乘员时,私人空间包括相邻空间而足够宽。因此,在这种情况下,无需故意设定隔板。因此,在本发明中,当存在至少在车辆宽度方向或车辆前后方向上并排就座的成员时,隔板被设定在并排就座的乘员之间。即,在本发明中,能够根据需要设定隔板。
17.如上所述,根据本发明的第一方面的自动驾驶车辆具有优异的效果,其中,该自动驾驶车辆能够在自动驾驶与人为驾驶之间切换,并且在人为驾驶期间不会阻碍视野,并且在自动驾驶期间能够确保私人空间。
18.根据本发明的第二方面的自动驾驶车辆具有优异的效果,其中,能够根据乘员的遮挡需要来调节遮挡的程度。
19.根据本发明的第三方面的自动驾驶车辆具有优异的效果,其中,能够根据自动驾驶期间的乘员的需要来选择设定隔板。
20.根据本发明的第四方面的自动驾驶车辆具有优异的效果,其中,因为当隔板设定允许装置不允许设定隔板时隔板被容纳,所以在人为驾驶期间,驾驶员能够在不会被隔板阻碍驾驶员的视野的情况下驾驶车辆。
21.根据本发明的第五方面的自动驾驶车辆具有优异的效果,其中,即使当挨着乘员的座椅为空时,也能够抑制乘员的空间不必要地变窄。
附图说明
22.下面将参考附图描述本发明的示例性实施例的特征、优点以及技术和工业意义,在附图中,相同的附图标记表示相同的元件,并且其中:
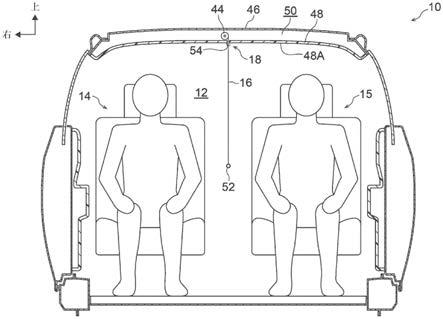
23.图1示出了当沿着车辆宽度方向和车辆上下方向剖开车厢并从车辆的前侧观察车厢时的根据实施例的自动驾驶车辆的车厢的剖视图;
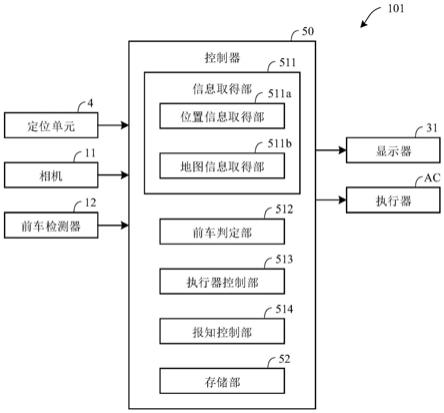
24.图2是示出了设置在根据实施例的自动驾驶车辆中的隔板设定允许装置的硬件构造的框图;
25.图3是示出了设置在根据实施例的自动驾驶车辆中的隔板设定允许装置的功能构造的框图;
26.图4是示出了设置在根据实施例的自动驾驶车辆中的隔板的展开处理的流程的示例的流程图;
27.图5a是示出了设置在根据实施例的自动驾驶车辆中的隔板的第二变形例的视图,并且是示出了隔板被容纳的状态的主要部分的放大剖视图;
28.图5b是示出了设置在根据实施例的自动驾驶车辆中的隔板的第二变形例的视图,并且是示出了隔板被展开的状态的主要部分的放大剖视图;
29.图6是示出了隔板被展开的状态的立体图,其示出了设置在根据实施例的自动驾驶车辆中的隔板的第三变形例;
30.图7是对应于图1的剖视图,其示出了设置在根据实施例的自动驾驶车辆中的隔板的第三变形例;
31.图8是示出了设置在根据实施例的自动驾驶车辆中的隔板的第四变形例的立体图;并且
32.图9是对应于图8的立体图,其示出了设置在根据实施例的自动驾驶车辆中的隔板的第四变形例。
具体实施方式
33.将参考附图描述根据本发明的实施例的自动驾驶车辆(在下文中,简称为“车辆”)10。根据本实施例的车辆10被构造成能够在自动驾驶与人为驾驶之间切换。
34.图1示出了当沿着车辆宽度方向和车辆上下方向剖开车厢12并从车辆的前侧观察车厢12时的根据本实施例的车辆10的车厢12的剖视图。如图1所示,本实施例的车辆10在车厢12中包括:车辆座椅14、15,该车辆座椅14、15沿着车辆宽度方向彼此相邻(并排)布置;以及隔板设定允许装置18,该隔板设定允许装置18允许设定视觉隔板16,该视觉隔板16在乘员之间阻碍就座在车辆座椅14、15上的乘员的视野,使得能够确保每一个乘员的私人空间。隔板设定允许装置18在车辆10的自动驾驶期间允许在乘员之间设定隔板16,使得能够确保乘员的私人空间,并且,是否允许设定是可选择的。即,隔板设定允许装置18在人为驾驶期间不运行。
35.隔板设定允许装置18的硬件构造
36.在此,将描述隔板设定允许装置18的硬件构造。
37.图2是示出了隔板设定允许装置18的硬件构造的框图。如图2所示,隔板设定允许装置18被构造成包括中央处理单元(cpu:处理器)20、只读存储器(rom)22、随机存取存储器(ram)24、存储器26、通信接口(通信i/f)28和输入-输出接口(输入-输出i/f)30。上述部件经由总线31连接,以便相互通信。
38.cpu 20是中央运算处理单元,该中央运算处理单元执行各种程序并控制每一个单元。即,cpu 20从rom 22或存储器26读取程序,并且使用ram 24作为工作区域来执行程序。cpu 20控制上述部件中的每一个,并且根据存储在rom 22或存储器26中的程序来执行各种运算处理。
39.rom 22存储各种程序和各种数据。ram 24作为工作区域临时存储程序或数据。存储器26由硬盘驱动器(hdd)或固态驱动器(ssd)组成,并且存储包括操作系统的各种程序和各种数据。在本实施例中,rom 22或存储器26存储用于执行显示处理的程序以及各种数据
等。
40.通信i/f 28是用于与服务器和其它装置(未示出)执行通信的接口,并且使用诸如以太网(注册商标)、长期演进(lte)、光纤分布式数据接口(fddi)和wi-fi(注册商标)的标准。
41.盖构件电机34、电磁离合器58、车载摄影相机40和隔板电机42均连接到输入-输出i/f 30。
42.如图1所示,隔板16由柔性材料制成,并且可以卷绕在柱状芯体44上。在隔板16被卷绕在芯体44上的状态下,隔板16可以被容纳在车辆10中的被限定在顶板46与顶棚构件48之间的顶棚空间(在下文中称为“容纳部”)50中,该顶棚构件48构成车厢12的上表面。此外,质量块52被设置在隔板16的末端处,使得展开的隔板16可以维持在悬挂状态。
43.另一方面,顶棚构件48设置有开口54,隔板16可以穿过该开口54。当在平面图中观察时,开口54被设置成被布置在乘员之间。
44.在此,盖构件56被设置成能够相对于开口54打开和关闭,并且能够沿着顶棚表面48a滑动。
45.盖构件电机34能够进行正转和反转,并且被连接到盖构件56。例如,尽管未示出,但小齿轮被连接到盖构件电机34,使得盖构件56经由小齿轮和齿条沿着顶棚表面48a可滑动地移动。
46.利用上述构造,开口54打开和关闭。当开口54随着盖构件56可滑动地移动而打开时,容纳部50和车厢12彼此连通。在隔板16卷绕在芯体44上并且被存储在容纳部50中的状态下,开口54由盖构件56关闭。
47.电磁离合器58被布置在芯体44(参见图1)与隔板电机42之间。芯体44与隔板电机42之间的连接和脱离可以经由电磁离合器58来切换。
48.例如,当电磁离合器58接通时,芯体44和隔板电机42连接,并且隔板电机42的驱动力传递到芯体44。另一方面,当电磁离合器58断开时,芯体44和隔板电机42脱离,并且隔板电机42的驱动力未传递到芯体44。即,芯体44可以空转。
49.车载摄影相机40被设置在车厢12中(参见图1)。如图1所示,车载摄影相机40拍摄车厢12内部的图像,使得可以识别就座的乘员的就座位置(车辆座椅14、15)。请注意,可以使用就座传感器来代替车载摄影相机40,只要能够识别就座的乘员的就座位置即可。
50.隔板电机42可以连接到芯体44,隔板16卷绕在该芯体44上。在隔板电机42连接到芯体44的状态下,隔板电机42被驱动以使芯体44旋转。基于从由车载摄影相机40拍摄的图像中检测到的结果来驱动目标隔板电机42。请注意,可以设置多个隔板电机42和多个隔板16。隔板16被放置在通过隔板电机42相互挨着就座的乘员之间。
51.此外,如上所述,在本实施例中,电磁离合器58被设置在芯体44与隔板电机42之间。芯体44与隔板电机42之间的连接和脱离可以经由电磁离合器58来切换。因此,当电磁离合器58接通时,芯体44与隔板电机42彼此连接。因此,隔板16通过隔板电机42的驱动力被自动地展开或容纳。
52.另一方面,当电磁离合器58断开时,芯体44与隔板电机42脱离。因此,隔板16被手动地展开。在此,例如,尽管未示出,但芯体44设置有弹簧。该弹簧被设定成使得当隔板16展开时,弹性能积聚在该弹簧中。隔板16可以被锁定在预定位置处。当锁定被释放时,隔板16
通过释放弹性能(弹簧的恢复力)而自动地卷绕在芯体44上(被容纳)。
53.隔板设定允许装置18的功能构造
54.隔板设定允许装置18使用上述硬件资源来实现各种功能。将参考图3描述由隔板设定允许装置18实现的功能构造。
55.如图3所示,隔板设定允许装置18被构造成包括隔板设定允许单元60、车厢摄影单元62、就座位置检测单元64和自动-手动选择单元66作为功能构造。当cpu 20读取并执行存储在rom 22或存储器26中的程序时,功能构造中的每一个单元由图2中所示的cpu 20实现。
56.如上所述,在车辆10的自动驾驶期间(参见图1),隔板设定允许单元60允许设定隔板16,该隔板16可以在乘员之间确保相互挨着就座的乘员的私人空间,并且可以选择是否设定隔板16。因此,当隔板设定允许单元60允许设定隔板16时,盖构件电机34被驱动。利用上述构造,盖构件56滑动以打开开口54(参见图1),并且可以使用隔板16。
57.车厢摄影单元62使用车载摄影相机40拍摄车厢12内部的图像。
58.就座位置检测单元64基于由车载摄影相机40拍摄的图像来检测就座在车厢12中的乘员的位置。在本实施例中,当乘员就座在彼此相邻的相应的车辆座椅14、15上时,隔板16可以被放置在车辆座椅14与车辆座椅15之间。
59.自动-手动选择单元66使得能够选择是自动展开隔板16还是手动展开隔板16。此外,如上所述,电磁离合器58被设置在芯体44(参见图1)与隔板电机42之间。芯体44与隔板电机42之间的连接和脱离可以经由电磁离合器58来切换。
60.例如,当电磁离合器58接通时,芯体44与隔板电机42连接,并且隔板电机42的驱动力传递到芯体44。另一方面,当电磁离合器58断开时,芯体44与隔板电机42脱离,并且隔板电机42的驱动力未传递到芯体44。即,芯体44可以空转。
61.因此,当通过自动-手动选择单元66选择自动展开时,电磁离合器58接通,这将隔板电机42的驱动力传递到芯体44。因此,在开口54随着盖构件56的可滑动的移动而被打开的状态下,隔板电机42被驱动以将隔板16通过开口54展开到车厢12中。
62.另一方面,当通过自动-手动选择单元66选择手动展开时,电磁离合器58断开,这不会将隔板电机42的驱动力传递到芯体44。结果,芯体44可以空转。因此,在开口54随着盖构件56的可滑动的移动而被打开的状态下,乘员可以将隔板16通过开口54展开到车厢12中。
63.隔板设定允许装置18的作用和效果
64.接下来,将描述根据本实施例的隔板设定允许装置18的作用和效果。
65.将参考图4所示的流程图来描述图2所示的隔板16的展开处理。展开处理由图2所示的cpu 20执行,使得cpu 20从rom 22或存储器26读取显示程序、将读取出的程序解压缩到ram 24中并执行该程序。
66.如图4所示,cpu 20在步骤s100中确定车辆10(参见图1)是否正在自动驾驶。
67.当cpu 20在步骤s100中确定出车辆10正在自动驾驶时(步骤s100:是),cpu 20前进到步骤s102中的处理。
68.此外,当cpu 20在步骤s100中确定出车辆10未正在自动驾驶时(步骤s100:否),cpu 20终止例程。即,隔板16不展开到车厢12中。
69.接下来,在步骤s102中,cpu 20确定是否通过隔板设定允许装置18允许使用隔板
16。
70.当cpu 20在步骤s102中确定出允许使用隔板16时(步骤s102:是),cpu 20前进到步骤s104中的处理。在步骤s102中,执行该处理,直到cpu 20确定出允许使用隔板16。
71.在步骤s104中,cpu 20驱动盖构件电机34。利用上述处理,盖构件56滑动以打开开口54。
72.接下来,在步骤s106中,cpu 20确定是否自动展开隔板16。当cpu 20在步骤s106中确定出隔板16被自动展开时(步骤s106:是),cpu 20前进到步骤s108中的处理。
73.接下来,在步骤s108中,cpu 20基于由车载摄影相机40拍摄的图像来检测就座在车厢12中的乘员的位置,以便识别要展开的隔板16的位置。
74.随后,在步骤s110中,cpu 20驱动使隔板16展开的隔板电机42。利用上述处理,隔板16被展开到车厢12中,并且被放置在相互挨着就座的乘员之间。
75.另一方面,当cpu 20在步骤s106中确定出隔板16被手动展开时(步骤s106:否),cpu 20前进到步骤s112中的处理。
76.随后,在步骤s112中,cpu 20断开电磁离合器58。利用上述处理,芯体44与隔板电机42脱离。因此,隔板16可以被手动展开。
77.如上所述,在本实施例中,图1所示的车辆10可以在自动驾驶与人为驾驶之间切换,并且车辆10设置有隔板设定允许装置18。隔板设定允许装置18被设定成当车辆10正在自动驾驶时允许在乘员之间设定作为视觉隔板的隔板16。即,隔板设定允许装置18在人为驾驶期间不运行。
78.换句话说,在本实施例中,在通过人为驾驶操作车辆10时,不设定隔板16。因此,当通过人为驾驶操作车辆10时,隔板16不会阻碍视野。另一方面,当车辆10正在自动驾驶时,设置隔板16能够确保私人空间。
79.此外,在本实施例中,在通过隔板设定允许装置18允许设定隔板16之后,可以选择是自动设定隔板16还是手动设定隔板16。即,在本实施例中,当车辆10正在自动驾驶时,可以根据乘员的需要来选择设定隔板16。
80.此外,在本实施例中,设置有容纳隔板16的容纳部50。当隔板设定允许装置18不允许设定隔板16时,隔板16被容纳在容纳部50中。即,即使未设定隔板16,隔板16也不会暴露于车厢12,并且在车辆10的人为驾驶期间,驾驶员能够在隔板16不阻碍视野的情况下操作车辆10。
81.此外,在本实施例中,车载摄影相机40拍摄车厢12内部的图像,并且就座位置检测单元64基于拍摄的图像来检测就座在车厢12中的乘员的位置。当乘员分别至少就座在沿着车辆宽度方向彼此相邻的车辆座椅14、15上时,隔板16可以被放置在车辆座椅14与车辆座椅15之间。
82.即,当没有乘员挨着就座的乘员时,私人空间包括相邻空间而足够宽。因此,在这种情况下,无需故意设定隔板。因此,在本实施例中,即使当挨着就座的乘员的座椅为空时,也能够抑制乘员周围的空间不必要地变窄。
83.在此,隔板16可以被放置在沿着车辆宽度方向彼此相邻的车辆座椅14与车辆座椅15之间。然而,本发明不限于此。例如,尽管未示出,但隔板16可以被放置在沿着车辆前后方向并排布置的车辆座椅之间。
84.其它实施例
85.如上所述,在本实施例中,图1所示的隔板16卷绕在柱状芯体44上,并且随着隔板电机42使芯体44旋转,隔板16被展开或卷绕。然而,隔板16不一定必需是卷绕的。
86.例如,作为第一变形例,尽管未示出,但隔板16可以在隔板16展开的状态下被容纳在被设置在顶板46与顶棚构件48之间的容纳部50中。在这种情况下,芯体44的外周表面与隔板16的表面接触,并且随着芯体44由于隔板16与芯体44之间的摩擦力而旋转,隔板16被送出。
87.如图1所示,当隔板16卷绕在芯体44上时,外径尺寸变大,这需要容纳部50以确保对应的尺寸。然而,根据第一变形例,隔板16未被卷绕在芯体44上,并且因此,尽管未示出,但可以减小容纳部50的在车辆上下方向上的尺寸。
88.此外,作为第二变形例,如图5a和图5b所示,在隔板设定允许装置70中可以使用可折叠隔板72。同样在这种情况下,与第一变形例的情况一样,与如图1所示的隔板16卷绕在芯体44上的情况相比,可以减小容纳部50的在车辆上下方向上的尺寸。
89.在第二变形例的情况下,在隔板72展开的状态下,绳索沿着隔板72的展开方向在隔板72的两个表面上一次地缠绕在隔板72上。绳索由隔板电机42缠绕。当绳索由隔板电机42缠绕时,绳索向上移动,并且隔板72随着绳索的向上移动而折叠。
90.此外,在上述实施例中,如图1所示,隔板16被容纳在容纳部50中,并且容纳部50未被暴露于车厢12。然而,本发明不限于此。
91.例如,作为第三变形例,如图6和图7所示,在隔板设定允许装置76中,在车厢78中设置有支撑柱80。支撑柱80可以是容纳部82。隔板84可以穿过的开口86被设置用于支撑柱80,并且隔板84通过开口86被展开或容纳。
92.在第三变形例的情况下,隔板84沿着大致水平的方向展开。因此,例如,轨道90沿着车辆前后方向和车辆宽度方向被布置在车厢78的顶棚构件88上。尽管未示出,但轨道90均设置有滑轮和皮带。皮带被附接到隔板84的末端。当驱动对应于每一个轨道90设置的隔板电机42(参见图2)时,皮带经由滑轮移动,这使得能够经由皮带展开或容纳隔板84。
93.在此,隔板84沿着车辆前后方向和车辆宽度方向被设置。然而,本发明不限于此,并且隔板84可以沿着车辆前后方向或车辆宽度方向被设置。此外,在此,轨道90沿着车辆前后方向和车辆宽度方向被布置。然而,轨道90根据车辆座椅14、15的布置而改变。
94.另外,作为第四变形例,如图8和图9所示,在隔板设定允许装置92中,控光玻璃96可以被设置在车厢94中。控光玻璃96可以改变透明度。如图8所示,当透明度高时,控光玻璃96不对应于视觉隔板,并且能够通过控光玻璃96看到挨着另一个乘员就座的乘员。因此,不能为两个乘员确保私人空间。
95.另一方面,如图9所示,当透明度降低时,由于遮光性变高,所以控光玻璃96可以阻碍视野。换句话说,不能通过控光玻璃96看到挨着另一个乘员就座的乘员。因此,可以为两个乘员确保私人空间。如上所述,在本实施例中,可以借助于控光方式根据乘员的遮挡的需要来调节遮挡的程度。
96.在此,控光玻璃96用作隔板。因此,控光玻璃96被永久地安装在车厢中。然而,可以控制光的构件不限于控光玻璃96。例如,尽管未示出,但可以使用可卷绕的屏幕型控光膜。
97.尽管上文已经描述了根据实施例的隔板设定允许装置,但在不脱离本发明的范围
的情况下,能够以各种模式来实现本发明。例如,在上述实施例中,除了cpu 20之外的各种处理器可以执行由cpu 20执行以使得cpu 20读取并执行软件(程序)的显示处理。在这种情况下,作为处理器,例示为:可编程逻辑器件(pld),其电路构造可以在制造之后进行改变,诸如现场可编程门阵列(fpga);以及专用电路,其是包括专门设计用于执行特定处理的电路构造的处理器,诸如专用集成电路(asic)。另外,可以由各种处理器中的一个处理器来执行隔板允许,或者可以由相同类型或不同类型的两个或更多个处理器的组合(例如,多个fpga、以及cpu和fpga的组合)来执行隔板允许。此外,更具体地,各种处理器的硬件构造是组合了电路元件(诸如半导体装置)的电路。
98.此外,在上述实施例中,存储器26被构造成存储各种数据。然而,本发明不限于此。例如,记录介质(诸如高密度盘(cd)、数字通用盘(dvd)或通用串行总线(usb)存储器)可以用作存储单元。在这种情况下,各种程序和数据等被存储在以上例示的记录介质中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。