1.本实用新型涉及物品集装收集装置技术领域,特别涉及一种旋臂式机械手与托盘协作装置。
背景技术:
2.玻璃瓶集装收集工序中,上序已将玻璃瓶按照一定的排列方式整齐摆放在托盘中,需要后序操作人员手工在托盘中安装挡板后,将托盘放置在旋臂式机械手相应位置,通过旋臂式机械手完成满载托盘的叠放堆积。
3.其中人工操作部分作业方式简单,但是劳动强度大,而且为了适应机械化速度,通过需要在车间中分布密集的操作人员。但是,即使安排密集的操作人员,仍不能满足大批量流水线作业的作业速度和作业效率。
4.因此如何提供一种旋臂式机械手与托盘协作装置提高物品集装收集的作业速度和作业效率是本领域技术人员亟待解决的技术问题。
技术实现要素:
5.本实用新型提供一种旋臂式机械手与托盘协作装置,消除现行物品集装收集中手工操作部分,提高集装收集的作业速度和作业效率,提高物品集装收集工序的自动化水平。
6.本实用新型解决上述技术问题的技术方案如下:一种旋臂式机械手与托盘协作装置,包括:安装板、直线轴承、直线导轨、齿条、悬臂担及同步驱动部,
7.安装板上端面设有与旋臂式机械手连接的接口;直线轴承固定在安装板的下端面;直线导轨与直线轴承适配且滑动连接;齿条固定在直线导轨下侧面;悬臂担固定在直线导轨或者齿条一端外侧且其可插入或退出托盘;同步驱动部固定在安装板下端面且其驱动端与齿条传动连接。
8.本实用新型的有益效果是:在旋臂式机械手与托盘之间设计协作装置,协作装置中的悬臂担在同步驱动部的带动下,插入或退出托盘,从而自动完成托盘的拿取、移动和放置,减少人工操作,提高旋臂式机械手与托盘之间的作业速度和作业效率。
9.在上述技术方案的基础上,本实用新型还可以做如下改进。
10.进一步,直线轴承、直线导轨、齿条及悬臂担均为两个且成组平行布置。
11.进一步,同步驱动部包括连接轴、步进电机、主动轮、被动轮及同步皮带,连接轴两端均固定有齿轮,齿轮与齿条啮合;步进电机固定在安装板下端面;主动轮固定在步进电机的输出轴上;被动轮固定在连接轴上;同步皮带与主动轮和被动轮传动连接。
12.同步带驱动部操作过程为:步进电机转动,并通过同步皮带同步带动主动轮和被动轮转动,由于被动轮和齿轮均固定在连接轴上,被动齿轮的转动力通过连接轴传递至齿轮,齿轮与齿条啮合连接,由于直线轴承与安装板固定连接,直线导轨与直线轴承滑动连接,齿条与直线导轨固定连接,悬臂担与直线导轨或者齿条固定连接,齿轮转动带动齿条移动,齿条移动将带动悬臂担相对与安装板往复移动。
13.采用上述进一步方案的有益效果是:齿条移动并带动悬臂担移动,即可完成托盘的插入或者退出,整体机械结构简单,操作过程稳定。
14.进一步,托盘外壁下部具有支撑台,悬臂担的自由端具有与托盘的支撑台相适配的承台。
15.采用上述进一步方案的有益效果是:设计承台与支撑台相适配,便于悬臂担移动插入其中的托盘。
16.进一步,还包括挡板夹持部,安装板为凸字型板,直线轴承固定在安装板大头端的两侧,挡板夹持部安装在安装板小头端的下端面。
17.进一步,托盘具有开口侧且对应开口侧的托盘上设有挡板安装槽,挡板夹持部包括气缸及夹具,气缸驱动夹具夹取挡板集库中的挡板可移动插接至挡板安装槽内。
18.采用上述进一步方案的有益效果是:当悬臂担移动托盘到达一定位置时,夹具夹取挡板集库中的挡板并插入挡板安装槽中,可以减少人工操作,提高旋臂式机械手与托盘之间的作业速度和作业效率,提高整体装置的自动化水平。
附图说明
19.图1为本实用新型一种旋臂式机械手与托盘协作装置连接旋臂式机械手和托盘的结构示意图;
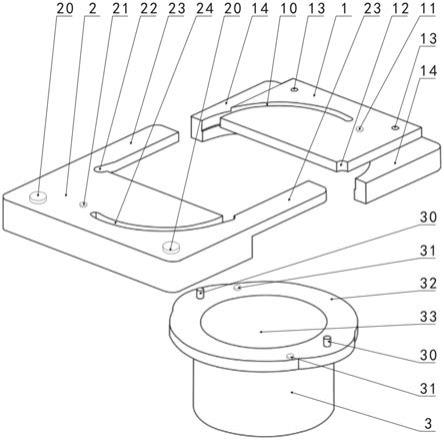
20.图2为本实用新型一种旋臂式机械手与托盘协作装置连接托盘的结构示意图;
21.图3为本实用新型一种旋臂式机械手与托盘协作装置正面立体结构示意图;
22.图4为本实用新型一种旋臂式机械手与托盘协作装置背面立体结构示意图;
23.图5为本实用新型一种旋臂式机械手与托盘协作装置爆炸结构示意图;
24.图6为托盘和挡板的组装结构示意图;
25.图7为托盘和挡板的拆分结构示意图。
26.附图中,各标号所代表的部件列表如下:
27.1、安装板,11、接口,2、直线轴承,3、直线导轨,4、齿条,5、悬臂担,51、承台,6、同步驱动部,61、连接轴,62、步进电机,63、主动轮,64、被动轮,65、同步皮带,66、齿轮,67、垫板,68、支撑柱,7、托盘,71、挡板安装槽,72、支撑台,8、旋臂式机械手,9、挡板夹持部,10、挡板集库,12、挡板。
具体实施方式
28.以下结合附图对本实用新型的原理和特征进行描述,所举实例只用于解释本实用新型,并非用于限定本实用新型的范围。
29.如图2所示,一种旋臂式机械手与托盘协作装置,包括:安装板1、直线轴承2、直线导轨3、齿条4、悬臂担5及同步驱动部6,
30.安装板1上端面设有与旋臂式机械手8连接的接口11;直线轴承2固定在安装板1的下端面;直线导轨3与直线轴承2适配且滑动连接;齿条4固定在直线导轨3下侧面;悬臂担5固定在直线导轨3或者齿条4一端外侧且其可插入或退出托盘7;同步驱动部6固定在安装板1下端面且其驱动端与齿条4传动连接,以驱动所述齿条4带动所述直线导轨3与安装板1相对滑动往复运动;本实用新型直线轴承2与直线导轨3为相对运动的直线运动机构,即可以
实现两机构直线相对往复运动的机构都属于等同的保护范围。
31.具体地,直线轴承2、直线导轨3、齿条4及悬臂担5均可以为两个且成组平行布置。
32.如图4所示,在一些具体实施例中,同步驱动部6可以包括连接轴61、步进电机62、主动轮63、被动轮64及同步皮带65,连接轴61两端均固定有齿轮66,齿轮66与齿条4啮合;步进电机62固定在安装板1下端面;主动轮63固定在步进电机62的输出轴上;被动轮64固定在连接轴61上;同步皮带65与主动轮63和被动轮64传动连接。
33.在一些具体实施例中,步进电机62固定在垫板67上,垫板67固定在安装板1的下端面。
34.在一些具体实施例中,连接轴61转动在两个支撑柱68的一端,两个支撑柱68的另一端固定在安装板1的下端面。
35.在一些具体实施例中,托盘7外壁下部具有支撑台72,悬臂担5的自由端具有与托盘7的支撑台72相适配的承台51,便于悬臂担5移动插入其中的托盘7.
36.如图4所述,在一些具体实施例中,还可以包括挡板夹持部9,安装板1为凸字型板,直线轴承2固定在安装板1大头端的两侧,挡板夹持部9安装在安装板1小头端的下端面。
37.如图4和图5所示,在一些具体实施例中,托盘7可以具有开口侧且对应开口侧的托盘7上设有挡板安装槽71,挡板夹持部9包括气缸及夹具,当悬臂担5移动托盘7到达一定位置时,便于夹具夹取挡板集库10中的挡板12并插入挡板安装槽71中,减少人工操作,提高旋臂式机械手8与托盘7之间的作业速度和作业效率,提高整体装置的自动化水平。
38.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。