1.本实用新型属于垃圾分类技术领域,具体地说,涉及一种智能便捷垃圾箱。
背景技术:
2.近年来,由于资源的匮乏及环境的污染,垃圾分类回收逐渐受到人们重视。但不少居民自主分类意识低导致垃圾分类回收效果差,甚至个别居民将电池与普通垃圾一起投放引起了严重的环境污染,并且经常会出现垃圾桶投放满后未被及时处理的现象。所以设计一种可以自动识别垃圾种类、分类投放并满载报警的智能便捷垃圾箱是有必要的。
技术实现要素:
3.针对上述问题,本实用新型提供了一种智能便捷垃圾箱,能够对投放的垃圾进行拍照识别,并将拉紧按照不同类别分别投放到相应的分类垃圾桶中,实现对垃圾的分类,以避免居民因分类不清楚,导致垃圾混放而造成污染环境的情况出现。
4.为实现上述目的,本实用新型是通过如下技术方案实现的:
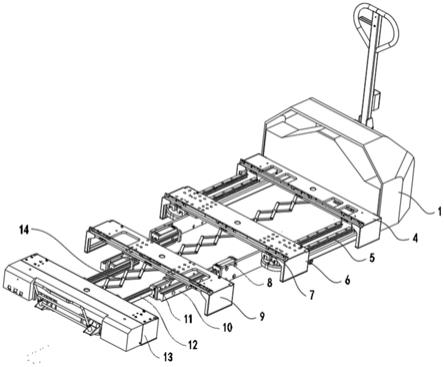
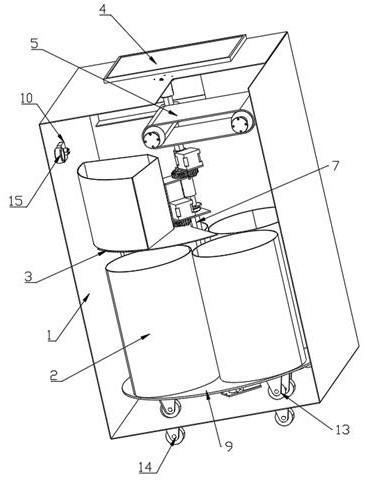
5.一种智能便捷垃圾箱包括箱体1、分类垃圾桶2、分拣装置3、垃圾信息显示装置4、传送装置5、摄像头6、安装柱7、处理器8、分类盘9,所述的箱体1的内腔中部安装有安装柱7,安装柱7的上下两端分别固定在箱体1的顶板和底板上,安装柱7的下部安装有分类盘9,分类盘9上沿圆周方向安装有分类垃圾桶2,箱体1的侧壁上设置有能够将分类垃圾桶2取出的箱门,分类垃圾桶2上方的安装柱7上安装有分拣装置3,箱体1的顶部开设有一个垃圾投放口,垃圾投放口的下方设置有固定在箱体1内壁上能够将垃圾传送到分拣装置3内的传送装置5,传送装置5的驱动电机通过驱动器与处理器8连接,与传送装置5的出料端相对的箱体1内壁上安装有能够对垃圾进行拍照的摄像头6,摄像头6通过上层处理器与处理器8连接,处理器8通过驱动模块与分拣装置3连接;所述的箱体1的顶部设置有垃圾信息显示装置4,垃圾信息显示装置4通过上层处理器与处理器8连接。
6.进一步,所述的摄像头6一侧的箱体1上安装有为摄像头6拍摄照片补光的补光灯15。
7.进一步,所述的分拣装置3包括分拣桶3-1、挡板3-2、u形安装座3-3、轴套3-4、舵机ⅰ3-5、主动齿轮ⅰ3-6、从动齿轮ⅰ3-7、舵机ⅱ3-8、主动齿轮ⅱ3-9、从动齿轮ⅱ3-10;所述的轴套3-4固定安装在安装柱7上,u形安装座3-3的开口向右,开口两端通过轴承安装在轴套3-4上,分拣桶3-1固定安装在u形安装座3-3的竖板上,分拣桶3-1的下端开口,u形安装座3-3的下板上通过轴承安装有一根短轴,短轴的下端固定安装有能够封闭分拣桶3-1下端开口的挡板3-2;舵机ⅰ3-5固定安装在轴套3-4的上部,舵机ⅰ3-5的驱动轴上安装有主动齿轮ⅰ3-6,从动齿轮ⅰ3-7固定安装在u形安装座3-3的上板上,从动齿轮ⅰ3-7与主动齿轮ⅰ3-6啮合;舵机ⅱ3-8固定安装在u形安装座3-3的下板上,舵机ⅱ3-8的驱动轴上安装有主动齿轮ⅱ3-9,从动齿轮ⅱ3-10固定安装在短轴上,从动齿轮ⅱ3-10与主动齿轮ⅱ3-9啮合;舵机ⅰ3-5、舵机ⅱ3-8分别与处理器8连接。
8.进一步,所述的挡板3-2的底部安装有超声波测距仪17,超声波测距仪17通过上层处理器与处理器8的图像采集模块连接。
9.进一步,所述的分类盘9通过轴承安装在安装柱7上,分类盘9的底部安装有从动齿轮ⅲ10,箱体1的底部安装有电机11,电机11的驱动轴上安装有主动齿轮ⅲ12,从动齿轮ⅲ10与主动齿轮ⅲ12啮合,电机11通过处理模块与处理器8连接。
10.进一步,所述的分类盘9的底部安装有万向轮ⅰ13。摄像头摄像头摄像头摄像头本实用新型的有益效果:
11.本实用新型能够对投放的垃圾进行拍照识别,并将拉紧按照不同类别分别投放到相应的分类垃圾桶中,实现对垃圾的分类,有益于将垃圾逐次单个地进行分拣,以避免居民因分类不清楚,导致垃圾混放而造成污染环境的情况出现。
附图说明
12.图1为本实用新型的外观示意图;
13.图2为本实用新型的内部结构示意图ⅰ;
14.图3为本实用新型的内部结构示意图ⅱ;
15.图4为本实用新型的分拣装置结构示意图;
16.图5为本实用新型的控制电路示意图。
具体实施方式
17.下面将结合本实用新型实施例和附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
18.如图1-3所示,一种智能便捷垃圾箱包括箱体1、分类垃圾桶2、分拣装置3、垃圾信息显示装置4、传送装置5、摄像头6、安装柱7、处理器8、分类盘9。所述的箱体1的内腔中部安装有安装柱7,安装柱7的上下两端分别固定在箱体1的顶板和底板上,安装柱7的下部安装有分类盘9,分类盘9上沿圆周方向安装有分类垃圾桶2,箱体1的侧壁上设置有能够将分类垃圾桶2取出的箱门,分类垃圾桶2上方的安装柱7上安装有分拣装置3,箱体1的顶部开设有一个垃圾投放口,垃圾投放口的下方设置有固定在箱体1内壁上能够将垃圾传送到分拣装置3内的传送装置5,传送装置5的驱动电机通过驱动器与处理器8连接,与传送装置5的出料端相对的箱体1内壁上安装有能够对垃圾进行拍照的摄像头6,摄像头6通过上层处理器与处理器8连接,处理器8通过驱动模块与分拣装置3连接;所述的箱体1的顶部设置有垃圾信息显示装置4,垃圾信息显示装置4通过上层处理器与处理器8连接。
19.对分类盘9上的沿圆周方向布置的分类垃圾桶2进行确定放置何种类别的垃圾,并使处理器8控制分拣装置3工作,控制分拣装置3能够根据处理器8的指令使分拣装置3到相应的分类垃圾桶2上方释放其内的对应的类别的垃圾。其具体工作为:通过垃圾投放口将垃圾逐个投放到传送装置5上,传送装置5将垃圾运送到分拣装置3时,在垃圾掉落到分拣装置3中的过程中,由摄像头6拍摄照片并将照片信息传递给上层处理器,上层处理器对图片进行处理,识别图片上的垃圾种类,垃圾识别完成后将信息传递处理器8,由处理器8发出指
令,在垃圾掉落到分拣装置3中后,由处理器8发出的指令控制分拣装置3工作,将识别的垃圾释放到该类别垃圾匹配的分类垃圾桶2中,从而完成垃圾的分类回收。通过十字螺丝将垃圾信息显示装置4可拆卸固定在箱体1的顶部,由上层处理器将垃圾的投放信息(投放顺序、种类、数量)通过垃圾信息显示装置4进行展示,以便于用户能够清楚的认识到垃圾的种类;并在无垃圾投放时由垃圾信息显示装置4播放垃圾分类宣传片,提升用户的垃圾分类意识。在本实用新型中,所述的传送装置5为传送带装置,传送带能够将需要识别的垃圾逐次单个运送到分拣装置3中,同时逐个传送的垃圾掉落过程中也便于摄像头6拍照识别。
20.在本实用新型中,作为优选,所述的摄像头6一侧的箱体1上安装有为摄像头6拍摄照片补光的补光灯15;由于箱体1内光线受到一定的影响,通过设置补光灯15,在光线不好的情况下投放垃圾时,补光灯15能够为摄像头6拍摄照片时补光,保证摄像头6拍摄的照片清晰,便于对照片上的垃圾进行准确的分类识别。
21.在本实用新型中,如图4所示,所述的分拣装置3包括分拣桶3-1、挡板3-2、u形安装座3-3、轴套3-4、舵机ⅰ3-5、主动齿轮ⅰ3-6、从动齿轮ⅰ3-7、舵机ⅱ3-8、主动齿轮ⅱ3-9、从动齿轮ⅱ3-10;所述的轴套3-4固定安装在安装柱7上,u形安装座3-3的开口向右,开口两端通过轴承安装在轴套3-4上,分拣桶3-1固定安装在u形安装座3-3的竖板上,分拣桶3-1的下端开口,u形安装座3-3的下板上通过轴承安装有一根短轴,短轴的下端固定安装有能够封闭分拣桶3-1下端开口的挡板3-2;舵机ⅰ3-5固定安装在轴套3-4的上部,舵机ⅰ3-5的驱动轴上安装有主动齿轮ⅰ3-6,从动齿轮ⅰ3-7固定安装在u形安装座3-3的上板上,从动齿轮ⅰ3-7与主动齿轮ⅰ3-6啮合;舵机ⅱ3-8固定安装在u形安装座3-3的下板上,舵机ⅱ3-8的驱动轴上安装有主动齿轮ⅱ3-9,从动齿轮ⅱ3-10固定安装在短轴上,从动齿轮ⅱ3-10与主动齿轮ⅱ3-9啮合;舵机ⅰ3-5、舵机ⅱ3-8分别与处理器8连接。通过处理器8实现对舵机ⅰ3-5和舵机ⅱ3-8进行控制,并且可以利用计算机和处理器8的串口通信,接收到处理器8所反馈回来的控制数据,包括:舵机ⅰ3-5、舵机ⅱ3-8的正向转动、反向转动以及定位功能和调速功能。由传送装置5传送过来的垃圾掉落到分拣桶3-1中,掉落的过程中,由摄像头6拍摄照片并将照片传递给上层处理器,上层处理器对图片进行处理,识别图片上的垃圾种类,垃圾识别完成后将信息传递给处理器8,由处理器8发出指令,控制舵机ⅰ3-5工作,舵机ⅰ3-5在转动的过程中,通过设置在其驱动轴的主动齿轮ⅰ3-6带动从动齿轮ⅰ3-7转动,由转动的从动齿轮ⅰ3-7通过u形安装座3-3带动分拣桶3-1转动,当舵机ⅰ3-5转动一定角度,使分拣桶3-1位于相应的分类垃圾桶2上方后,处理器8控制舵机ⅱ3-8工作,由舵机ⅱ3-8的驱动轴带动安装在其上的主动齿轮ⅱ3-9转动,主动齿轮ⅱ3-9带动从动齿轮ⅱ3-10转动,通过转动的从动齿轮ⅱ3-10带动位于分拣桶3-1底部出口的挡板3-2将分拣桶3-1的底部出口打开,使其内的垃圾能够准确的落入到对应的分类垃圾桶2中,分拣桶3-1中垃圾释放完毕后,由处理器8控制舵机ⅱ3-8工作,将挡板3-2复位关闭分拣桶3-1的底部出口,然后再由处理器8控制舵机ⅰ3-5工作,将分拣桶3-1复位到传送装置5的落料端下方。垃圾信息显示装置4、摄像头6基于jetson-nano开发,使用计算机视觉和pytorch框架下的人工神经网络进行垃圾分类。具有较高的准确率,较好的适应和泛化能力。实现了对已学习过的垃圾种类进行分类、显示分类信息、记录分类历史的功能。
22.在本实用新型中,作为优选,所述的挡板3-2的底部安装有超声波测距仪17,超声波测距仪17与处理器8连接。在处理器8控制舵机ⅰ3-5带动分拣桶3-1转动到相应的分类垃
圾桶2上方时,超声波测距仪17对相应的分类垃圾桶2内垃圾堆放高度进行测距,并将测得的信息传递给处理器8,当该距离为相应的分类垃圾桶2内垃圾已经投满时,由处理器8通过串口向jetson-nano发送信息,jetson-nano处于监听状态,一旦收到信息,立即控制完成当前分类操作、停止垃圾的分类和识别并同时由垃圾信息显示装置4显示满载。由于所述的分类盘9通过轴承安装在安装柱7上,分类盘9的底部安装有从动齿轮ⅲ10,箱体1的底部安装有电机11,电机11的驱动轴上安装有主动齿轮ⅲ12,从动齿轮ⅲ10与主动齿轮ⅲ12啮合,电机11通过驱动模块与处理器8连接。当相应的分类垃圾桶2装满垃圾后,处理器8控制电机11工作,电机11带动安装在其驱动轴上的主动齿轮ⅲ12转动,主动齿轮ⅲ12带动从动齿轮ⅲ10转动,转动的从动齿轮ⅲ10带动分类盘9转动,分类盘9将载满垃圾的分类垃圾桶2转至箱体1的侧壁上的箱门处,将满载的分类垃圾桶2转至智能便捷垃圾箱箱门处,由用户将载满垃圾的分类垃圾桶2取出将垃圾倒出。箱体1的内壁上设置有为分拣装置3、垃圾信息显示装置4、传送装置5、摄像头6、处理器8等所有用电装置供电的供电装置16。
23.在本实用新型中,所述的分类盘9的底部安装有万向轮ⅰ13,由于分类盘9要放置多个分类垃圾桶2,当分类垃圾桶2中盛放垃圾后,分类盘9承载的重力会加大,通过在分类盘9的底部设置万向轮ⅰ13,便于分类盘9的转动过程中对其进行支撑,同时又便于分类盘9的转动。
24.在本实用新型中,所述的箱体1的底部安装有带刹车的万向轮ⅱ14,通过设置的带刹车的万向轮ⅱ14便于对整个智能便捷垃圾箱的移动,同时在智能便捷垃圾箱对进行垃圾进行识别分拣或者停止使用的过程中,万向轮ⅱ14能够被固定,使其不会转动。
25.本实用新型工作过程:
26.通过垃圾投放口将垃圾逐个投放到传送装置5上,传送装置5将垃圾运送到分拣装置3时,垃圾掉落到分拣桶3-1中,掉落的过程中,由摄像头6拍摄照片并将照片信息传递给上层处理器,上层处理器对图片进行处理,识别图片上的垃圾种类,垃圾识别完成后将该信息传递给处理器8,然后由处理器8根据接收到的具体垃圾分类信号控制舵机ⅰ3-5工作,舵机ⅰ3-5在转动的过程中,通过设置在其驱动轴的主动齿轮ⅰ3-6带动从动齿轮ⅰ3-7转动,由转动的从动齿轮ⅰ3-7通过u形安装座3-3带动分拣桶3-1转动,当舵机ⅰ3-5转动一定角度,使分拣桶3-1位于相应的分类垃圾桶2上方后,处理器8控制舵机ⅱ3-8工作,由舵机ⅱ3-8的驱动轴带动安装在其上的主动齿轮ⅱ3-9转动,主动齿轮ⅱ3-9带动从动齿轮ⅱ3-10转动,通过转动的从动齿轮ⅱ3-10带动位于分拣桶3-1底部出口的挡板3-2将分拣桶3-1的底部出口打开,使其内的垃圾能够准确的落入到对应的分类垃圾桶2中,分拣桶3-1中垃圾释放完毕后,由处理器8控制舵机ⅱ3-8工作,将挡板3-2复位关闭分拣桶3-1的底部出口,然后再由处理器8控制舵机ⅰ3-5工作,将分拣桶3-1复位到传送装置5的落料端下方,为下一次垃圾识别做准备。在处理器8控制舵机ⅰ3-5带动分拣桶3-1转动到相应的分类垃圾桶2上方时,超声波测距仪17对相应的分类垃圾桶2内垃圾堆放高度进行测距,并将测得的信息传递给处理器8,当该距离为相应的分类垃圾桶2内垃圾已经投满时,由处理器8并控制立即完成当前分类操作、停止垃圾的分类和识别,同时,垃圾信息显示装置4显示载满;同时,处理器8控制电机11工作,电机11带动安装在其驱动轴上的主动齿轮ⅲ12转动,主动齿轮ⅲ12带动从动齿轮ⅲ10转动,转动的从动齿轮ⅲ10带动分类盘9转动,分类盘9将载满垃圾的分类垃圾桶2转至箱体1的侧壁上的箱门处,将满载的分类垃圾桶2转至智能便捷垃圾箱箱门处,由用户将载
满垃圾的分类垃圾桶2取出将垃圾倒出。
27.本实用新型有益于将垃圾逐次单个地进行分拣,在使用时更有益于垃圾的智能分类;本实用新型有益于将投放垃圾的信息(投放顺序、种类、数量)进行展示,并在无垃圾投放时播放垃圾分类宣传片,更有益于提升用户的垃圾分类意识;本实用新型有益于对底部垃圾桶的满载情况进行检测,将满载信息传送到垃圾信息显示装置及处理器上并将满载的垃圾桶转至箱体的箱门处,利于对垃圾的处理。
28.最后说明的是,以上优选实施例仅用以说明本实用新型的技术方案而非限制,尽管通过上述优选实施例已经对本实用新型进行了详细的描述,但本领域技术人员应当理解,可以在形式上和细节上对其作出各种各样的改变,而不偏离本实用新型权利要求书所限定的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。