1.本实用新型涉及工业机械技术领域,具体为一种机床上下料的工业机器人。
背景技术:
2.机床(英文名称:machine tool)是指制造机器的机器,亦称工作母机或工具机,习惯上简称机床。一般分为金属切削机床、锻压机床和木工机床等。现代机械制造中加工机械零件的方法很多:除切削加工外,还有铸造、锻造、焊接、冲压、挤压等,但凡属精度要求较高和表面粗糙度要求较细的零件,一般都需在机床上用切削的方法进行最终加工。机床在国民经济现代化的建设中起着重大作用。
3.机床在上下料的时候,需要用到工业机器人对工件进行上下料,随着科技的发展,自动化机械已经发展到相当成熟阶段,能够大大降低劳动强度,工业机器人作为自动化机械中十分重要的组成部分它随着自动化机械的发展也有了很大的发展,并且应用越来越广泛,目前市场上的工业机器人种类数量都十分繁多。
4.但是目前的机床上下料的工业机器人,在使用的时候,操作步骤繁琐,并且上下料速度慢,从而降低了机床加工效率,为此,我们提出一种机床上下料的工业机器人。
技术实现要素:
5.本实用新型要解决的技术问题是克服现有的缺陷,提供一种机床上下料的工业机器人,在使用的时候,操作步骤简便,并且上下料速度快,从而能够提高机床加工效率,可以有效解决背景技术中的问题。
6.为实现上述目的,本实用新型提供如下技术方案:一种机床上下料的工业机器人,包括底板、夹取机构和大臂控制单元;
7.底板:上表面固定连接有电动伸缩杆,所述电动伸缩杆的上端固定连接有固定架,所述固定架上滑动连接有大臂,所述大臂的上侧面设有齿条,所述大臂的前端转动连接有小臂,所述小臂的前端固定连接有支撑框;
8.夹取机构:安装在支撑框上;
9.大臂控制单元:设在固定架上;
10.其中:还包括单片机,所述单片机设在底板上,所述单片机的输入端电连接外部电源的输出端,所述单片机的输出端电连接电动伸缩杆的输入端。
11.进一步的,所述夹取机构包含固定板、电机一、联轴器一、螺纹轴和夹板,所述固定板固定连接在支撑框的右端,所述电机一安装在固定板上,所述联轴器一固定套接在电机一的输出轴上,所述螺纹轴转动连接在支撑框上,所述螺纹轴的右端穿过支撑框的右端,所述联轴器一的左部固定套接在螺纹轴的侧面右端,所述螺纹轴的左右两侧螺纹方向相反,所述夹板的后侧开设有螺纹孔且螺纹孔与螺纹轴螺纹连接,所述夹板有两个且均匀分布,所述夹板的后端与支撑框滑动连接,所述电机一的输入端电连接单片机的输出端。通过启动电机一,电机一的输出轴转动可以带动联轴器一转动,联轴器一转动可以带动螺纹轴转
动,螺纹轴转动可以带动两个夹板夹住或者放开,然后进行上下料。
12.进一步的,所述大臂控制单元包含安装板、电机二、联轴器二、转轴和齿轮,所述安装板固定连接在固定架的前端面上,所述电机二安装在安装板上,所述联轴器二固定套接在电机二的输出轴上,所述转轴转动连接在固定架的上部,所述转轴的前端穿过固定架,所述联轴器二的后部固定套接在转轴的侧面前端,所述齿轮固定套接在转轴的侧面中部,所述齿轮与大臂上的齿条啮合,所述电机二的输入端电连接单片机的输出端。通过启动电机二,电机二的输出轴转动可以带动联轴器二转动,联轴器二转动可以带动转轴转动,转轴转动可以带动齿轮转动,齿轮转动可以带动大臂移动。
13.进一步的,还包括挡片一和挡片二,所述挡片一固定连接在大臂的下侧面前部,所述挡片二固定连接在大臂的后端。当大臂移动的时候,容易过于靠前或者靠后,通过挡片一和挡片二,可以防止大臂移动的过于靠前或者靠后。
14.进一步的,还包括支撑块、电动推杆和支撑杆,所述支撑块固定连接在小臂的上侧面后部,所述支撑杆固定连接在大臂的上侧面前部,所述电动推杆的两端分别与支撑块和支撑杆的上端转动连接,所述电动推杆的输入端电连接单片机的输出端。通过启动电动推杆,电动推杆伸长或者缩短可以带动支撑块向下或者向上移动,支撑块向下或者向上移动可以带动小臂转动,然后来调整小臂的角度。
15.进一步的,还包括滑杆和滑管,所述滑杆固定连接在固定架的后侧面下端,所述滑管固定连接在底板的上表面后侧,所述滑杆滑动连接在滑管的内侧。当固定架工作的时候,通过滑杆和滑管,可以增加固定架的工作稳定性。
16.与现有技术相比,本实用新型的有益效果是:本机床上下料的工业机器人,具有以下好处:
17.1、本机床上下料的工业机器人设置了夹取机构,通过启动电机一,电机一的输出轴转动可以带动联轴器一转动,联轴器一转动可以带动螺纹轴转动,螺纹轴转动可以带动两个夹板夹住或者放开,然后进行上下料;
18.2、本机床上下料的工业机器人设置了大臂控制单元,通过启动电机二,电机二的输出轴转动可以带动联轴器二转动,联轴器二转动可以带动转轴转动,转轴转动可以带动齿轮转动,齿轮转动可以带动大臂移动;
19.3、该机床上下料的工业机器人,在使用的时候,操作步骤简便,并且上下料速度快,从而能够提高机床加工效率。
附图说明
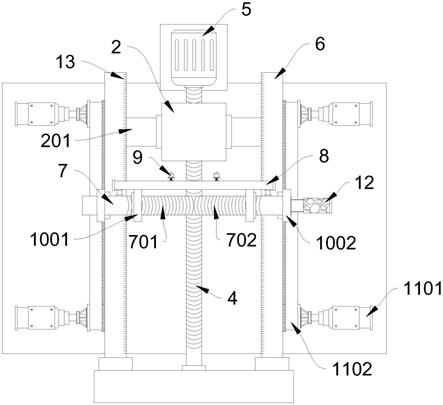
20.图1为本实用新型结构示意图;
21.图2为本实用新型右侧结构示意图;
22.图3为本实用新型a处放大结构示意图;
23.图4为本实用新型b处放大结构示意图。
24.图中:1底板、2电动伸缩杆、3固定架、4大臂、5小臂、6支撑框、7单片机、8夹取机构、81固定板、82电机一、83联轴器一、84螺纹轴、85夹板、9大臂控制单元、91安装板、92电机二、93联轴器二、94转轴、95齿轮、10挡片一、11挡片二、12支撑块、13电动推杆、14支撑杆、15滑杆、16滑管。
具体实施方式
25.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
26.请参阅图1-4,本实施例提供一种技术方案:一种机床上下料的工业机器人,包括底板1、夹取机构8和大臂控制单元9;
27.底板1:上表面固定连接有电动伸缩杆2,电动伸缩杆2的上端固定连接有固定架3,固定架3上滑动连接有大臂4,大臂4的上侧面设有齿条,大臂4的前端转动连接有小臂5,小臂5的前端固定连接有支撑框6;还包括挡片一10和挡片二11,挡片一10固定连接在大臂4的下侧面前部,挡片二11固定连接在大臂4的后端。还包括支撑块12、电动推杆13和支撑杆14,支撑块12固定连接在小臂5的上侧面后部,支撑杆14固定连接在大臂4的上侧面前部,电动推杆13的两端分别与支撑块12和支撑杆14的上端转动连接,电动推杆13的输入端电连接单片机7的输出端。还包括滑杆15和滑管16,滑杆15固定连接在固定架3的后侧面下端,滑管16固定连接在底板1的上表面后侧,滑杆15滑动连接在滑管16的内侧。当大臂4移动的时候,容易过于靠前或者靠后,通过挡片一10和挡片二11,可以防止大臂4移动的过于靠前或者靠后。通过启动电动推杆13,电动推杆13伸长或者缩短可以带动支撑块12向下或者向上移动,支撑块12向下或者向上移动可以带动小臂5转动,然后来调整小臂5的角度。当固定架3工作的时候,通过滑杆15和滑管16,可以增加固定架3的工作稳定性;
28.夹取机构8:安装在支撑框6上;夹取机构8包含固定板81、电机一82、联轴器一83、螺纹轴84和夹板85,固定板81固定连接在支撑框6的右端,电机一82安装在固定板81上,联轴器一83固定套接在电机一82的输出轴上,螺纹轴84转动连接在支撑框6上,螺纹轴84的右端穿过支撑框6的右端,联轴器一83的左部固定套接在螺纹轴84的侧面右端,螺纹轴84的左右两侧螺纹方向相反,夹板85的后侧开设有螺纹孔且螺纹孔与螺纹轴84螺纹连接,夹板85有两个且均匀分布,夹板85的后端与支撑框6滑动连接,电机一82的输入端电连接单片机7的输出端。通过启动电机一82,电机一82的输出轴转动可以带动联轴器一83转动,联轴器一83转动可以带动螺纹轴84转动,螺纹轴84转动可以带动两个夹板85夹住或者放开,然后进行上下料;
29.大臂控制单元9:设在固定架3上;大臂控制单元9包含安装板91、电机二92、联轴器二93、转轴94和齿轮95,安装板91固定连接在固定架3的前端面上,电机二92安装在安装板91上,联轴器二93固定套接在电机二92的输出轴上,转轴94转动连接在固定架3的上部,转轴94的前端穿过固定架3,联轴器二93的后部固定套接在转轴94的侧面前端,齿轮95固定套接在转轴94的侧面中部,齿轮95与大臂4上的齿条啮合,电机二92的输入端电连接单片机7的输出端。通过启动电机二92,电机二92的输出轴转动可以带动联轴器二93转动,联轴器二93转动可以带动转轴94转动,转轴94转动可以带动齿轮95转动,齿轮95转动可以带动大臂4移动;
30.其中:还包括单片机7,单片机7设在底板1上,单片机7的输入端电连接外部电源的输出端,单片机7的输出端电连接电动伸缩杆2的输入端。
31.本实用新型提供的一种机床上下料的工业机器人的工作原理如下:
32.首先,上料的时候,单片机7控制电机一82启动,通过启动电机一82,电机一82的输出轴转动可以带动联轴器一83转动,联轴器一83转动可以带动螺纹轴84转动,螺纹轴84转动可以带动两个夹板85夹住工件,然后单片机7控制电动伸缩杆2伸长,电动伸缩杆2伸长可以带动固定架3向上移动,固定架3向上移动可以带动大臂4向上移动,然后单片机7控制电机二92启动,通过启动电机二92,电机二92的输出轴转动可以带动联轴器二93转动,联轴器二93转动可以带动转轴94转动,转轴94转动可以带动齿轮95转动,齿轮95转动可以带动大臂4移动,然后大臂4移动带动小臂5移动,小臂5移动带动夹板85进行上料,当下料的时候,单片机7控制电机一82启动,通过启动电机一82,电机一82的输出轴转动可以带动联轴器一83转动,联轴器一83转动可以带动螺纹轴84转动,螺纹轴84转动可以带动两个夹板85夹住机床上的工件,然后单片机7控制电机二92启动,通过启动电机二92,电机二92的输出轴转动可以带动联轴器二93转动,联轴器二93转动可以带动转轴94转动,转轴94转动可以带动齿轮95转动,齿轮95转动可以带动大臂4移动,然后大臂4移动带动小臂5移动,然后单片机7控制电动伸缩杆2缩短,电动伸缩杆2缩短可以带动固定架3向下移动,固定架3向下移动可以带动大臂4向下移动,然后进行下料,在进行上下料的时候,单片机7通过控制电动推杆13启动,通过启动电动推杆13,电动推杆13伸长或者缩短可以带动支撑块12向下或者向上移动,支撑块12向下或者向上移动可以带动小臂5转动,然后来调整小臂5的角度,步骤非常简便,并且上下料速度快。
33.值得注意的是,单片机7的具体型号为pic12f675,电机一82和电机二92可选用步进电机86bygh35011840。单片机7控制电机一82、电机二92、电动伸缩杆2和电动推杆13工作采用现有技术中常用的方法。
34.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本实用新型的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。