1.本实用新型涉及焊接装置技术领域,具体涉及一种钢筋盖梁骨架片焊接机器人。
背景技术:
2.焊接机器人是从事焊接工作的工业机器人,根据国际标准化组织工业机器人属于标准焊接机器人的定义,工业机器人是一种多用途的、可重复编程的自动控制操作机用于工业自动化领域。焊接技术在各个制造领域中是必不可少的,但是现在于建筑领域大多数的焊接工作都是采用人工焊接,当劳动强度大时,人容易疲劳,使工作效率降低,且其焊接时产生的各种粉尘对人体的危害很大。
3.随着工程技术的快速发展,一些企业开始采用机械的自动化设备逐步代替人工。目前也有一些焊接机器人应用到建筑行业焊接工作中,但是相关的焊接机器人多为固定在工位上的机器人,其可及的焊接区域较为有限,其也不便于拆卸,更不利于对机器人的维护,且多为人工操作机器人进行焊接工作的半自动化机器人,很难满足如钢筋盖梁骨架片之类的大工件的加工焊接对焊接机器人的使用需求。
4.公开于该背景技术部分的信息仅仅旨在加深对本实用新型总体背景技术的理解,而不应当被视为承认或以任何形式暗示该信息构成本领域技术人员所公知的现有技术。
技术实现要素:
5.本实用新型目的在于提供一种钢筋盖梁骨架片焊接机器人,旨在解决现有的相关焊接设备难以满足钢筋盖梁骨架片之类的大工件的焊接需求、且工作效率低的技术问题。
6.为解决上述技术问题,本实用新型采用如下技术方案:
7.设计一种钢筋盖梁骨架片焊接机器人,包括焊接装置和移动装置,所述焊接装置包括机械臂和焊机,所述焊机包括连接在所述机械臂上的焊枪和焊接电源,所述移动装置包括地轨和行走平板,所述地轨上设置有齿条、滑轨和滑块,所述行走平板上设置有行星减速机,所述行星减速机通过齿轮与所述地轨上的齿条配合控制所述行走平板移动,所述行走平板通过滑块和滑轨安装在所述地轨上,所述机械臂安装在所述行走平板上。
8.优选的,所述地轨的两侧设有夹具承载平台。
9.优选的,所述夹具承载平台上设置有工装夹具。
10.优选的,所述地轨的一端设有清枪站。
11.优选的,所述焊接装置设有送丝机。
12.优选的,所述行走平板上设置有防碰撞传感器。
13.优选的,所述焊接平台上设置有工装夹具。
14.优选的,所述机械臂为crp-rh14-10机器人 。
15.优选的,所述crp-rh14-10机器人配置有机器人控制柜。
16.优选的,所述crp-rh14-10机器人具有开放的外部通讯和io接口,可与国内外焊机匹配。
17.优选的,所述焊接电源为麦克米特500a大功率焊接电源,支持长时间焊接,经久耐用。
18.与现有技术相比,本实用新型的主要有益技术效果在于:
19.1. 本实用新型可以实现自动化焊接,且操作简单,功能强大,焊接可及区域大,支持对大尺寸工件多点多面的摆动焊、点焊和鱼纹焊等多种焊接模式。
20.2. 本实用新型采用滑块滑轨的移动方式,其传动精度高,焊接位置定位准确,有效的保证了焊接精度。
21.3. 本实用新型焊接速度快、操作故障率低、极大地节省了人工,提高了生产效率。
附图说明
22.图1为本实用新型一种实施例的结构总图。
23.图2为本实用新型一种实施例的机械臂和焊枪示意图。
24.图3为本实用新型一种实施例的地轨示意图。
25.图4为本实用新型一种实施例的滑块滑轨示意图。
26.图5为本实用新型一种实施例的齿条示意图。
27.图6为本实用新型一种实施例的行走平板和减速器示意图。
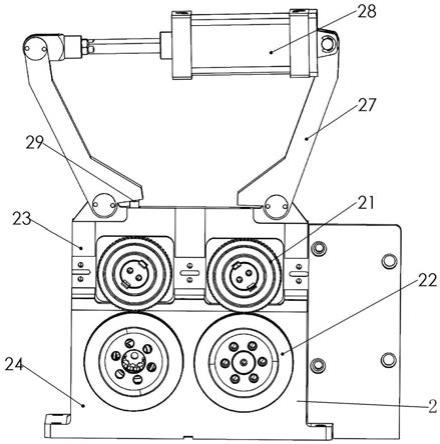
28.图7为本实用新型一种实施例的焊接平台和工装夹具示意图。
29.以上各图中,1为机械臂,2为焊接平台,21为工装夹具,3为清枪站,41为地轨,411为滑块,412为滑轨,413为齿条,42为行走平板,11为焊接电源,12为机器人控制柜,13为焊枪,5为行星减速机,51为齿轮。
具体实施方式
30.下面结合附图和实施例来说明本实用新型的具体实施方式,但以下实施例只是用来详细说明本实用新型,并不以任何方式限制本实用新型的范围。
31.在本实用新型的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述技术方案和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。本申请如涉及“第一”、“第二”等是用于区别类似的对象,而非是限定特定的顺序或先后次序。
32.以下实施例中所涉及的单元模块或传感器等器件,如无特别说明,则均为常规市售产品。
33.实施例1:一种钢筋盖梁骨架片焊接机器人,参见图1至图7,包括焊接装置和移动装置,所述焊接装置包括机械臂1和焊机,所述焊机包括连接在所述机械臂1上的焊枪13和焊接电源12,所述移动装置包括地轨41和行走平板42,所述地轨41上设置有齿条413、滑轨412和滑块411,所述行走平板42上设置有行星减速机5,所述行星减速机5通过齿轮51与所述地轨41上的齿条413配合控制所述行走平板42移动,所述行走平板42通过滑块411和滑轨412连接在所述地轨41上,所述机械臂1和所述焊接电源11连接在所述行走平板42上,所述地轨41的两侧连接焊接平台2,所述焊接平台2上设置有工装夹具21,所述地轨41的最左端连接清枪站3。
34.上述钢筋盖梁骨架片焊接机器人的操作使用方法如下:
35.使用时,人工将需要焊接的钢筋盖梁骨架放置所述焊接平台的所述工装夹具之间,夹紧之后即可启动所述焊接机器人,所述焊接机器人会按照编写的程序进行工作,所述焊接机器人在程序的控制下,由所述行星减速机5上的所述齿轮51和所述地轨41上连接的所述齿条413配合带动所述行走平板42在所述地轨41上移动从而将所述焊接机器人移送至所需要的位置进行焊接工作,大大拓展了焊接区域,能够满足大工件多点多面的焊接需求。
36.上面结合附图和实施例对本实用新型作了详细的说明,但是,所属技术领域的技术人员能够理解,在不脱离本实用新型技术构思的前提下,还可以对上述实施例中的各个具体参数进行变更,或者对相关部件、结构及材料进行等同替代,从而形成多个具体的实施例,均为本实用新型的常见变化范围,在此不再一一详述。
技术特征:
1.一种钢筋盖梁骨架片焊接机器人,其特征在于,包括焊接装置和移动装置,所述焊接装置包括机械臂和焊机,所述焊机包括焊接电源和安装在所述机械臂上的焊枪,所述移动装置包括地轨和行走平板,所述地轨上设置有齿条、滑轨和滑块,所述行走平板上设置有减速机,所述减速机通过齿轮与所述地轨上的齿条配合控制所述行走平板移动,所述行走平板通过滑块和滑轨连接在所述地轨上,所述机械臂和所述焊接电源安装在所述行走平板上。2.根据权利要求1所述的钢筋盖梁骨架片焊接机器人,其特征在于,所述机械臂为crp-rh14-10机器人。3.根据权利要求2所述的钢筋盖梁骨架片焊接机器人,其特征在于,所述crp-rh14-10机器人具有开放的外部通讯和io接口。4.根据权利要求2所述的钢筋盖梁骨架片焊接机器人,其特征在于,所述crp-rh14-10机器人配置有机器人控制柜。5.根据权利要求1所述的钢筋盖梁骨架片焊接机器人,其特征在于,所述地轨的两侧设有对应的夹具承载平台。6.根据权利要求5所述的钢筋盖梁骨架片焊接机器人,其特征在于,所述夹具承载平台上设有相匹配的工装夹具。7.根据权利要求1所述的钢筋盖梁骨架片焊接机器人,其特征在于,在所述地轨的一端设有用于清理焊枪的清枪站。8.根据权利要求1所述的钢筋盖梁骨架片焊接机器人,其特征在于,所述行走平板上设有防碰撞传感器。9.根据权利要求1所述的钢筋盖梁骨架片焊接机器人,其特征在于,所述焊接电源为麦克米特500a大功率焊接电源。10.根据权利要求1所述的钢筋盖梁骨架片焊接机器人,其特征在于,所述焊接装置设有对应的送丝机。
技术总结
本实用新型公开了一种钢筋盖梁骨架片焊接机器人,旨在解决现有焊接设备焊接区域有限、难以满足大工件的焊接需求、且工作效率低的技术问题。该焊接机器人包括焊接装置和移动装置,所述焊接装置包括机械臂和焊机,所述焊机包括连接在所述机械臂上的焊枪和焊接电源,所述移动装置包括地轨和行走平板,所述地轨上设置有齿条、滑轨和滑块,所述行走平板上设置有行星减速机,所述行星减速机通过齿轮与所述地轨上的齿条配合控制所述行走平板移动,所述行走平板连接在所述地轨上,所述机械臂和所述焊接电源连接在所述行走平板上,机械臂随着行走平板在地轨上自由移动,拓展了焊接可及区域,可以满足钢筋盖梁骨架片之类大工件多点多面的焊接需求,便于后期维护且操作简单,焊接速度快极大地提高了工作效率。速度快极大地提高了工作效率。速度快极大地提高了工作效率。
技术研发人员:梁亮
受保护的技术使用者:郑州市聚能建筑机械有限公司
技术研发日:2021.08.18
技术公布日:2022/3/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。