1.本实用新型涉及镜头自动组装领域,特别涉及一种镜头全自动组装设备。
背景技术:
2.镜头是指电影摄影机、放映机用以生成影像的光学部件,在镜头的生产组装过程中普遍采用人工组装的方式,操作麻烦,组装效率低,组装质量的一致性难以保证,后来出现的自动组装设备仍需要在不同设备上周转,自动化程度降低,影响效率。
3.现有的组装镜头分为点胶、组装、焊接这三个工序,每完成一个工序需人工操作并将产品运送到下一工序,生产周期长,物流周转慢,浪费人力,实有必要开发一种新型的机构,该机构构能够将点胶、组装、焊接这三个工序在同一设备上完成,从而减少人力及物流过程,提高生产效率,为此,我们提出一种镜头全自动组装设备。
技术实现要素:
4.本实用新型的主要目的在于提供一种镜头全自动组装设备,可以有效解决背景技术中生产周期长、物流周转慢和浪费人力的问题。
5.为实现上述目的,本实用新型采取的技术方案为:一种镜头全自动组装设备,包括底座、点胶机构、翻转机构、激光焊接机构、转盘机构以及机器人抓取机构,所述底座包括机台桌面以及支架,所述支架上表面与机台桌面下表面连接,所述点胶机构包括保护罩振动盘、机器人点胶装置以及出料装置,所述保护罩振动盘下表面与机台桌面上表面连接,所述机器人点胶装置下表面与机台桌面上表面连接,所述出料装置下表面与机台桌面上表面连接,所述翻转机构包括角度气缸以及待料工装,所述角度气缸一端设有旋转轴,所述待料工装内表面与旋转轴连接,所述激光焊接机构包括激光发生器以及移动机构,所述激光发生器安装于移动机构上,所述转盘机构包括电机、分度盘以及定位工装,所述电机下表面与机台桌面上表面连接,所述分度盘下表面与电机连接,若干所述定位工装下表面均与分度盘上表面连接,所述机器人抓取机构包括六轴机器人以及吸盘装置,所述吸盘装置安装于六轴机器人一端。
6.优选地,所述底座还包括万向轮以及固定盘,若干所述万向轮一端均与支架下表面连接,若干所述固定盘一端均与支架下表面连接,其中,万向轮以及固定盘均有十二个,固定盘的作用时稳固设备,防止设备晃动。
7.优选地,所述点胶机构还包括固定架,两个所述固定架下表面均与机台桌面上表面连接,两个所述固定架一侧表面均与出料装置一端连接,固定架的作用时承载出料装置。
8.优选地,所述翻转机构还包括滑轨以及移动架,所述移动架一侧表面与待料工装一端连接,两个所述滑轨下表面均与机台桌面上表面连接,两个所述滑轨分别与移动架两端滑动配合,滑轨方便移动架向装配位移动。
9.优选地,所述激光焊接机构还包括导轨,所述导轨下表面与机台桌面上表面连接,所述移动机构与导轨滑动配合,导轨方便移动机构移动。
10.优选地,所述转盘机构还包括皮带,所述电机一端设有转动轴,所述电机与转动轴旋转配合,所述皮带一端与转动轴外表面连接,皮带可以带动分度盘转动。
11.优选地,所述机器人抓取机构还包括支撑架以及产品放置台,所述支撑架上表面与六轴机器人下表面连接,所述支撑架两端均与机台桌面上表面连接,所述产品放置台下表面与机台桌面上表面连接,产品放置台用来防止组装好的镜头。
12.与现有技术相比,本实用新型具有如下有益效果:
13.本实用新型采用全流程自动化控制,可快速准确地将点胶后的保护罩与镜头装配并进行焊接,提高了生产效率及点胶、焊接稳定性,将点胶、组装、焊接这三个工序在同一设备上完成,从而减少人力及物流过程,提高生产效率。
附图说明
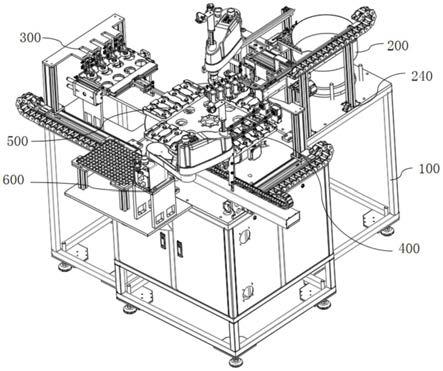
14.图1为本实用新型一种镜头全自动组装设备的外部整体结构示意图;
15.图2为本实用新型一种镜头全自动组装设备的俯视结构示意图;
16.图3为本实用新型一种镜头全自动组装设备的侧视结构示意图;
17.图4为本实用新型一种镜头全自动组装设备图2中a处的局部放大图;
18.图5为本实用新型一种镜头全自动组装设备图2中b处的局部放大图。
19.图中:100、底座;110、机台桌面;120、支架;130、万向轮;140、固定盘;200、点胶机构;210、保护罩振动盘;220、机器人点胶装置;230、出料装置;240、固定架;300、翻转机构;310、角度气缸;320、待料工装;330、滑轨;340、移动架;400、激光焊接机构;410、激光发生器;420、移动机构;430、导轨;500、转盘机构;510、电机;520、分度盘;530、定位工装;540、皮带;600、机器人抓取机构;610、六轴机器人;620、吸盘装置;630、支撑架;640、产品放置台。
具体实施方式
20.为使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本实用新型。
21.在本实用新型的描述中,需要说明的是,术语“上”、“下”、“内”、“外”“前端”、“后端”、“两端”、“一端”、“另一端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
22.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设置有”、“连接”等,应做广义理解,例如“连接”,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
23.请参照图1—5所示,本实用新型为一种镜头全自动组装设备,包括底座100、点胶机构200、翻转机构300、激光焊接机构400、转盘机构500以及机器人抓取机构600,底座100包括机台桌面110以及支架120,支架120上表面与机台桌面110下表面连接,点胶机构200包括保护罩振动盘210、机器人点胶装置220以及出料装置230,保护罩振动盘210下表面与机
台桌面110上表面连接,机器人点胶装置220下表面与机台桌面110上表面连接,出料装置230下表面与机台桌面110上表面连接,翻转机构300包括角度气缸310以及待料工装320,角度气缸310一端设有旋转轴,待料工装320内表面与旋转轴连接,激光焊接机构400包括激光发生器410以及移动机构420,激光发生器410安装于移动机构420上,转盘机构500包括电机510、分度盘520以及定位工装530,电机510下表面与机台桌面110上表面连接,分度盘520下表面与电机510连接,若干定位工装530下表面均与分度盘520上表面连接,机器人抓取机构600包括六轴机器人610以及吸盘装置620,吸盘装置620安装于六轴机器人610一端。
24.进一步地,底座100还包括万向轮130以及固定盘140,若干万向轮130一端均与支架120下表面连接,若干固定盘140一端均与支架120下表面连接,其中,万向轮130以及固定盘140均有十二个,固定盘140的作用时稳固设备,防止设备晃动。
25.进一步地,点胶机构200还包括固定架240,两个固定架240下表面均与机台桌面110上表面连接,两个固定架240一侧表面均与出料装置230一端连接,固定架240的作用时承载出料装置230。
26.进一步地,翻转机构300还包括滑轨330以及移动架340,移动架340一侧表面与待料工装320一端连接,两个滑轨330下表面均与机台桌面110上表面连接,两个滑轨330分别与移动架340两端滑动配合,滑轨330方便移动架340向装配位移动。
27.进一步地,激光焊接机构400还包括导轨430,导轨430下表面与机台桌面110上表面连接,移动机构420与导轨430滑动配合,导轨430方便移动机构420移动。
28.进一步地,转盘机构500还包括皮带540,电机510一端设有转动轴,电机510与转动轴旋转配合,皮带540一端与转动轴外表面连接,皮带540可以带动分度盘520转动。
29.进一步地,机器人抓取机构600还包括支撑架630以及产品放置台640,支撑架630上表面与六轴机器人610下表面连接,支撑架630两端均与机台桌面110上表面连接,产品放置台640下表面与机台桌面110上表面连接,产品放置台640用来防止组装好的镜头。
30.下面为本实用新型的工作原理:
31.请参照图1—5所示,本实用新型为一种镜头全自动组装设备,其中电机510的型号为fl42sth33-0956ma,角度气缸310的型号为cdu6-5d,保护罩振动盘210将保护罩整齐排列,出料装置230将保护罩移动到点胶为,机器人点胶装置220在点完胶后,将保护罩振动盘210上的保护罩放入定位工装530中,镜头放入待料工装320上,启动角度气缸310,镜头随之旋转到装配位,然后移动定位工装530进行镜头与保护罩的装配,装配完成后,分度盘520再次旋转,激光发生器410对装配完成的镜头和保护罩进行焊接,焊接完毕后,六轴机器人610将镜头取出放置在产品放置台640上,设备将点胶镜头、人工组装保护罩与镜头、激光焊接三个工序在同一个设备上完成,从而减少人力及物流过程,提高生产组装效率。
32.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
